敏捷SAR卫星聚束模式姿态机动策略研究
2016-03-16韩晓磊张庆君刘杰张润宁袁智
韩晓磊 张庆君 刘杰 张润宁 袁智
(1 北京空间飞行器总体设计部,北京 100094)(2 航天东方红卫星有限公司,北京 100094)
敏捷SAR卫星聚束模式姿态机动策略研究
韩晓磊1张庆君1刘杰1张润宁2袁智1
(1 北京空间飞行器总体设计部,北京 100094)(2 航天东方红卫星有限公司,北京 100094)
提出了敏捷SAR卫星聚束模式姿态机动参数计算方法,充分考虑了相位中心位置和离轴角的影响,通过矢量计算方法得到敏捷SAR卫星聚束模式成像所需的初始姿态角,通过迭代计算消除相位中心位置影响,得到准确姿态角。文章通过Matlab和STK软件联合仿真,验证了上述计算方法的有效性。
合成孔径雷达;敏捷SAR卫星; 聚束模式;姿态机动
1 引言
合成孔径雷达(SAR)是一种微波成像雷达,可以对地面目标进行高分辨率的探测,具有全天候、全天时的优势。分辨率是星载SAR 系统的关键性指标之一,高分辨率可以提高SAR对目标的检测和识别性能,扩展SAR系统的应用领域。根据SAR工作原理,距离向分辨率可以通过增加发射信号带宽提高;方位向分辨率可以通过减小方位向天线孔径长度提高[1]。但随着方位孔径长度减小,天线的增益也随之下降,受限于系统灵敏度决定的固定功率孔径积,不能无限制地通过减小天线孔径提高星载SAR系统方位向分辨率。而另一种实现方位向高分辨率的方式是通过雷达波束扫描增加合成孔径时间,实现方位向高分辨率成像,由此形成了一种常用的高分辨率星载SAR工作模式:聚束模式。它通过雷达波束扫描使波束中心始终瞄准地面固定点,从而使成像区域始终处于雷达波束的照射之下,延长了合成孔径时间,实现了方位向高分辨率成像[2]。德国的TerraSAR-X卫星在设计寿命末期进行了聚束模式试验,它通过将方位向波束扫描范围扩展到±2.2°,在轨实现了聚束模式,将TerraSAR-X卫星的最高方位向分辨率从1.1 m提升到约0.2 m[3]。
敏捷SAR卫星有效载荷固定在卫星上,依靠姿态控制系统控制卫星整体绕俯仰、横滚、偏航3个轴向摆动,实现SAR成像所需的波束扫描。敏捷SAR卫星具有较高的灵活性和成像能力,能高效地实现高分辨率聚束模式成像[4-6]。文献[6]给出了敏捷SAR卫星滑动聚束模式对俯仰姿态机动控制的要求,文献[7]给出了轻型SAR卫星聚束模式姿态快速机动和高精度追踪控制策略及实现方式。但上述文献的分析结果都是基于直线三角几何关系得到,未考虑卫星轨道和地球表面的弯曲特性影响,而且未考虑雷达天线相位中心和波束指向偏离星本体坐标系原点和坐标轴的影响,不适用于高分辨率聚束模式SAR卫星。本文从精确的轨道和地球模型出发,提出了一种基于迭代计算的敏捷SAR卫星聚束模式姿态机动参数计算方法,该方法能适应SAR天线在星体上各种不同的安装位置,并充分考虑了可能存在的波束离轴角。
2 卫星坐标系及姿态描述方法
2.1 坐标系
为研究敏捷SAR卫星聚束模式的姿态机动参数需求,须定义如下坐标系[8]:地心惯性坐标系OE-XIYIZI,地心固连坐标系OE-XEYEZE,卫星轨道坐标系OS-XOYOZO,卫星本体坐标系OS-XBYBZB和天线坐标系OP-XAYAZA等,各坐标系之间的关系如图1所示。

图1 坐标系定义示意图Fig.1 Schematic diagram of definition of the coordinate systems
2.2 姿态描述方法
卫星本体坐标系相对于参考坐标系的姿态描述有多种方法,如方向余弦矩阵、欧拉角、欧拉轴/角参数、欧拉四元数、罗德里格参数等。本文用到其中3种常用的卫星姿态描述方法,即欧拉轴/角参数、欧拉角和欧拉四元数。实际应用中需要在上述姿态描述方法之间进行转换,欧拉轴/角参数到欧拉四元数的转换关系如下[9]:
(1)
欧拉四元数到3-1-2转序下欧拉角的转换关系如下[10]:
(2)
3-1-2转序下,欧拉角到欧拉四元数的转换关系如下[10]:
(3)
式中:ex、ey、ez分别为转轴方向矢量e在参考坐标系中的三个方向余弦,φ为绕转轴的转动角度,q1、q2、q3和q4为欧拉四元数,φ、θ和ψ为3-1-2转序下绕X轴、Y轴和Z轴转动的欧拉角。而其他转序下的转换关系可以类推得到。
3 敏捷SAR卫星聚束模式姿态机动参数计算方法
敏捷SAR卫星一般采用整星机动实现雷达波束方位向扫描,不具备方位向电扫描能力。但距离向一般具备一定的电扫描能力,成像过程中存在波束指向偏离星本体坐标系Z轴的离轴角。此外,敏捷SAR卫星天线安装方式一般不能保证天线相位中心与卫星质心重合,该中心的轨道系坐标随整星姿态机动发生变化,传统卫星姿态机动参数计算方法没有考虑这个变化的影响,将造成指向偏差,如图2所示。因此,有必要针对敏捷SAR卫星聚束模式自身特点,开发适合它的姿态机动参数计算方法,以减小甚至消除姿态指向偏差。
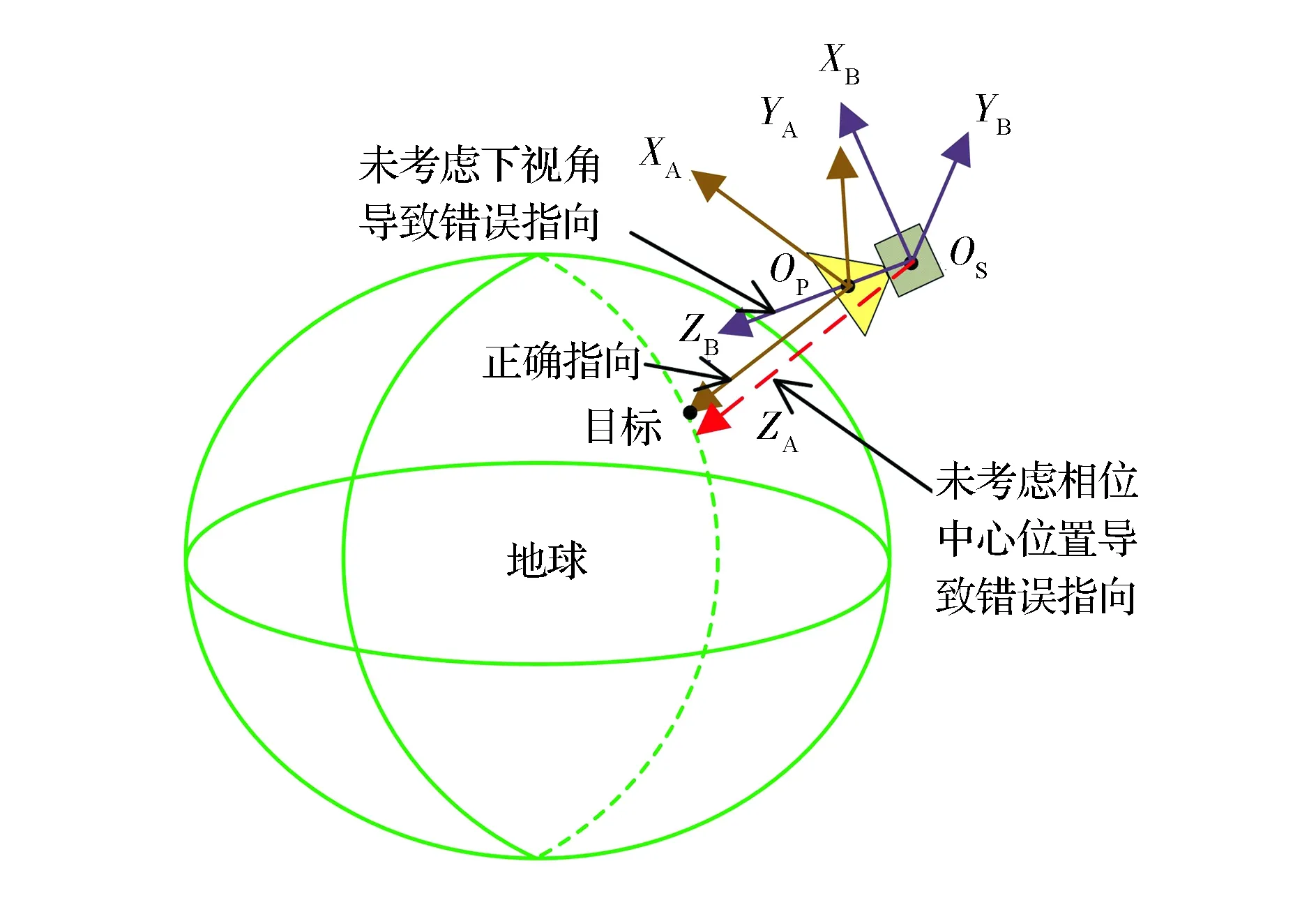
图2 算法必要性说明示意图Fig.2 Schematic diagram of necessity of the algorithm
本节给出一种新的敏捷SAR卫星聚束模式姿态机动参数计算方法,该方法包含3个主要步骤,分别为瞄准点和时序规划、需求姿态角粗算和需求姿态角精算,如图3所示。

图3 计算流程图Fig.3 Block diagram of the computation algorithm
1)第1步,瞄准点和时序规划
聚束模式工作时雷达波束中心始终瞄准地面待观测场景的几何中心,因此选择该几何中心作为地面瞄准点。首先将瞄准点经纬度坐标变换成地心惯性系坐标,根据此坐标及星历数据,寻找瞄准点回波多普勒中心为零的星历时刻,多普勒中心计算方法如下[11]:
(4)
式中:Rs为地心惯性坐标系下卫星的位置矢量,Rt为地心惯性坐标系下瞄准点的位置矢量,Vs为地心惯性坐标系下卫星的速度矢量,Vt为地心惯性坐标系下瞄准点的速度矢量,λ为载波波长,Rst为卫星与瞄准点之间的距离。以瞄准点回波多普勒中心为零的星历时刻t0为整个成像时序的中心。此步骤将传统SAR卫星的姿态导引包含到成像姿态机动参数计算中,保证了回波信号多普勒中心为0Hz,因此,敏捷SAR卫星聚束模式无须单独进行姿态导引。
根据需求方位向分辨率ρa和多普勒调频率fa计算成像时间为
(5)
式中:Vg为零多普勒线扫过地面的速度,kwa为多普勒信号处理加权扩展因子,fa为多普勒调频率。
(6)
最后,将地面瞄准点和地心坐标变换到轨道坐标系,为后续姿态角计算提供输入。
2)第2步,需求姿态角粗算
计算需求姿态角时,应按照时序规划得到的成像星历时刻逐点进行计算。天线相位中心测定后,可以计算出天线相位中心在卫星本体坐标系下的坐标,但因姿态角未知,还不能得到天线相位中心在轨道坐标系下的精确坐标。粗算阶段,以其在卫星本体坐标系下的坐标代替轨道坐标系坐标,由于上述两个坐标系原点同为卫星质心,且星体尺寸一般较小,两坐标系下的相位中心坐标差一般为米级,可以用于姿态角粗算,这种近似引入的误差将在精算阶段予以消除。
如图4所示,根据天线相位中心OP和地面瞄准点T在轨道系下的坐标,可得到期望的波束中心指向向量,以VPT表示。根据卫星质心OS和天线相位中心OP在轨道系下的坐标,可得到卫星质心到相位中心的向量,以VSP表示。由于姿态机动时是星体围绕卫星质心OS转动,应以卫星质心为起点计算期望指向向量,以VST表示。
(7)

图4 需求姿态角计算方法示意图Fig.4 Schematic diagram of algorithm for computing the required attitude angle
根据地心OE在轨道系下的坐标,可得到起始Z轴指向向量,以VSE表示。由于雷达波束存在离轴角,根据旋转变换关系,可得到波束起始指向向量VSL在轨道系下的投影矩阵VSL_T,具体如下:
(8)
式中:C(θ)为旋转转换矩阵,θ为离轴角,VSE_T为VSE在轨道系下的投影矩阵。
根据欧拉定理,卫星绕质心的姿态机动可以由绕通过质心的某一固定轴转动一定角度得到。该转轴方向矢量用e表示,转动角度用φ表示,这即是欧拉轴/角参数式。根据最短路径旋转准则,可由VSL和VST计算得到[12]
(9)
(10)
根据式(1)可得到欧拉四元数,再利用式(2)得到3-1-2转序下的初始欧拉角[9]。由于本阶段计算过程中,使用天线相位中心在卫星本体坐标系的坐标代替轨道坐标系坐标,所以初始欧拉角中包含一定的误差,下一步将重点剔除这个误差。
3)第3步,需求姿态角精算
利用上一步得到的初始欧拉角,计算星本体坐标系到轨道坐标系的转换矩阵,并将天线相位中心星本体坐标系坐标变换成轨道坐标系坐标。然后以此坐标为输入,重复第2步的计算过程,得到新的欧拉角。比较新欧拉角与前一次计算得到的欧拉角之间的差值,如大于预先设定的门限值,则用新欧拉角代替前一次计算得到的欧拉角,重复上述过程,直到新欧拉角与前一次计算得到的欧拉角之间的差值小于预先设定的门限值。
由于计算新欧拉角所用的转换矩阵总是比前一次计算欧拉角时的转换矩阵更精确,因此,新欧拉角逐渐向准确的需求姿态角逼近,而新欧拉角与前一次计算得到的欧拉角之差逐渐向零收敛。通过选择合适的门限值,能得到满足精度需求的姿态角。这个迭代计算过程有效剔除了天线相位中心与质心不重合导致的指向误差,得到满足精度要求的聚束模式成像需求姿态角。利用姿态运动学方程,可进一步得到需求的角速度三轴分量。
4 设计实例及仿真验证
通过Matlab和STK软件联合仿真,验证上述计算方法的有效性,验证流程如图5所示。首先根据输入条件,按本文给出的计算方法,在Matlab软件中计算姿态机动参数,然后将姿态机动参数计算结果导入STK软件,显示姿态机动和波束指向变换,并将地面瞄准点位置信息输回Matlab软件,分析STK软件中得到的瞄准点位置信息与期望的瞄准点位置信息之间的差异,并给出相应性能分析结果。由于STK软件的正确性已经经过工程验证,它的分析结果能真实地反映卫星运动规律,故上述仿真实验具有较高的可信度。

图5 仿真验证流程图Fig.5 Block diagram of the simulation and validation
本次仿真实验的SAR卫星聚束模式输入参数如表1所示,根据本文给出的计算方法,得到实现聚束模式的姿态机动参数,图6为以轨道系为参考系的需求欧拉四元数,图7为以地心惯性系为参考系的需求欧拉四元数,图8为以轨道系为参考系,3-1-2转序下的需求欧拉角。可以看到聚束模式成像过程中俯仰机动范围最大,达到1.883 5°,偏航机动次之,达到0.476 8°,横滚机动最小,为0.004 8°,实际工程中此方向可以保持不动。姿态角速度在三轴的角速度分量如图9所示。
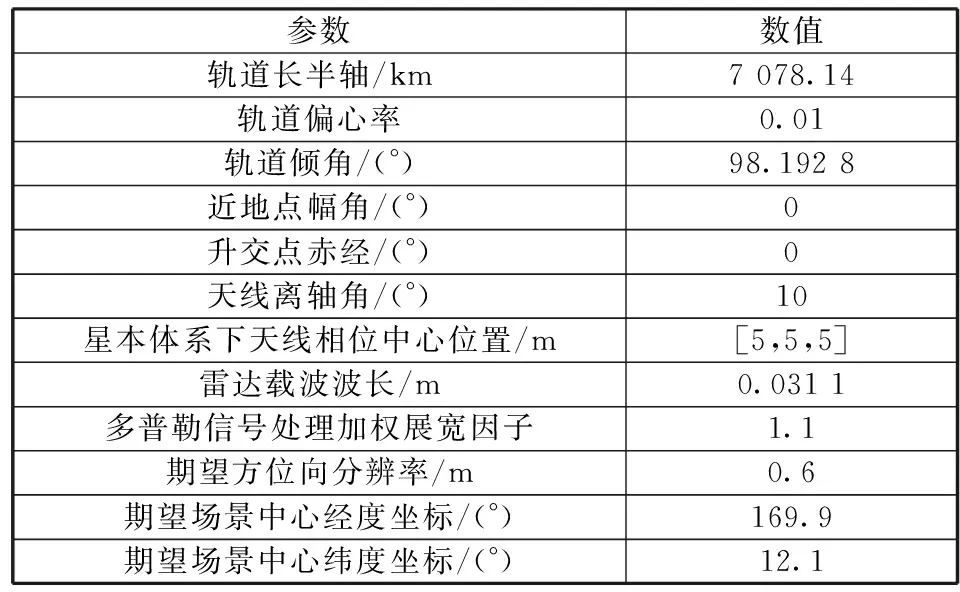
表1 输入参数表Table 1 Input parameters

图6 以轨道系为参考系的需求欧拉四元数Fig.6 Required Euler quaternion referring to the orbit coordinate system

图7 以地心惯性系为参考系的需求欧拉四元数Fig.7 Required Euler quaternion referring to the earth inertial coordinate system

图8 以轨道系为参考系3-1-2转序下的需求欧拉角Fig.8 Required Euler angle referring to the orbit coordinate system with rotation sequence 3-1-2

图9 姿态角速度三轴分量Fig.9 Angle velocity components on the three axes
将上述姿态角导入STK软件,通过STK中虚拟SAR卫星的雷达波束指向,验证上述计算结果的正确性。STK软件中虚拟卫星同样采用表1中的输入参数,得到成像起始、中间和结束时刻波束指向,以及地面瞄准点位置,如图10所示。其中黄色叉形区域为期望的成像场景中心,可见雷达波束在成像起始、中间和结束时刻都准确指向期望的场景中心,证明了上述姿态机动参数计算结果的正确性。再将STK软件中得到的实际瞄准点位置信息导回到Matlab软件中进行分析,得到瞄准误差,如图11所示。可见瞄准误差在10-8m量级,可以忽略不计。
根据得到的姿态信息,计算成像场景中心点的距离徙动曲线,如图12所示。成像场景中心点的瞬时多普勒曲线如图13所示,可见场景中心点的多普勒带宽为12 625 Hz,零多普勒线扫过地面的速度为6894 m/s,计算得到场景中心点分辨率为0.6 m,满足设计要求,证明了上述计算过程的有效性。
为了进行对比分析,本文在相同输入参数条件下,采用传统方法计算得到聚束模式姿态机动参数。然后,同样利用STK软件进行分析,最终得到的瞄准误差如图14所示,其中图14(a)为没有考虑离轴角和天线安装位置时,得到的瞄准误差;图14(b)为没有考虑天线安装位置时,得到的瞄准误差。由图14可见,敏捷SAR卫星实现聚束模式时必须考虑离轴角,而当精度要求较高时,还需要考虑天线安装位置。上述仿真实验证明了本文提出的敏捷SAR卫星聚束模式姿态机动参数计算方法的必要性和有效性。

图10 STK软件中虚拟SAR卫星的波束指向Fig.10 Beam direction of virtual satellite in STK
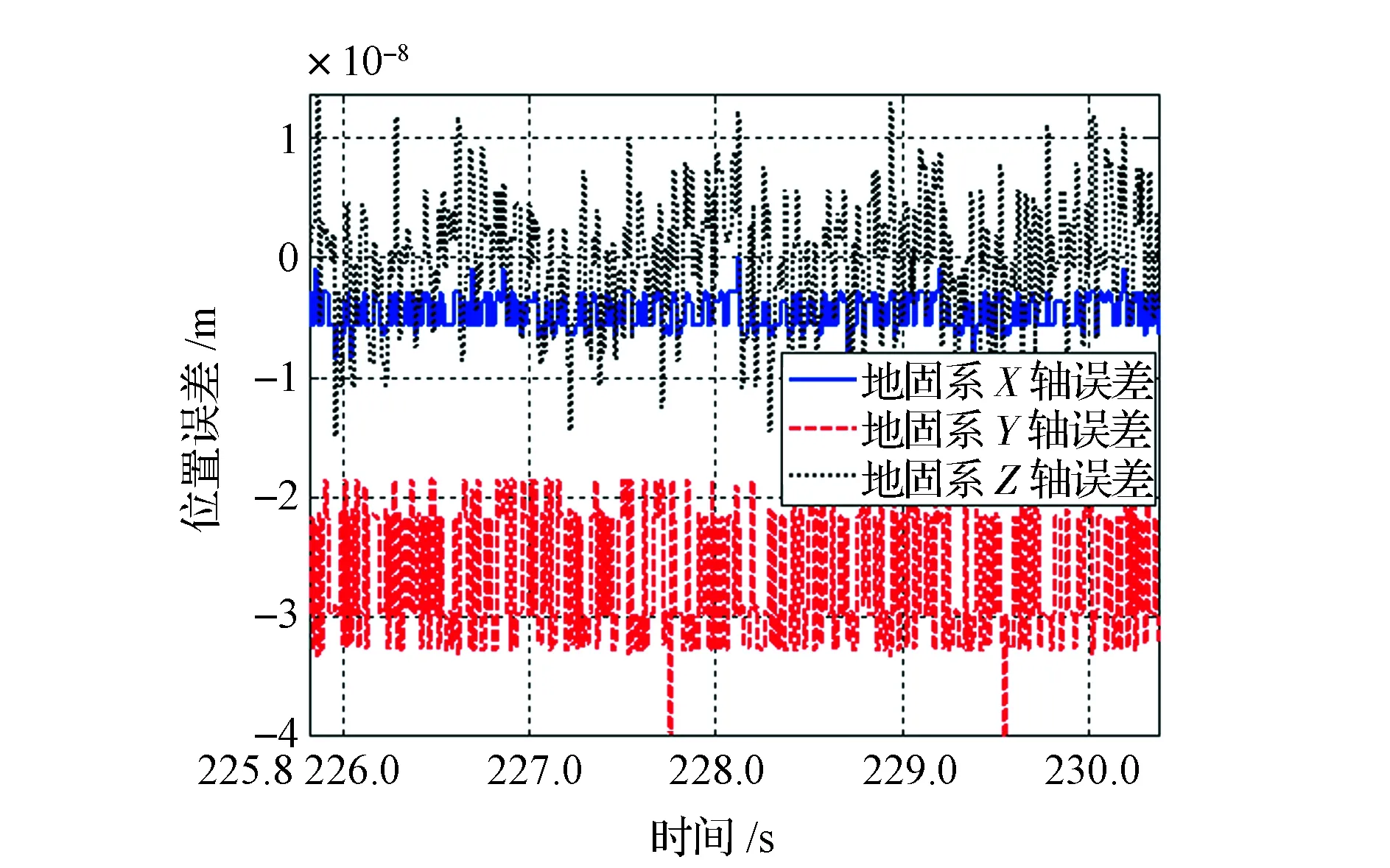
图11 地面瞄准误差Fig.11 Aiming error on the ground

图12 场景中心点的距离徙动曲线Fig.12 Range migration graph of central point of scene

图13 场景中心点的瞬时多普勒频率Fig.13 Instantaneous Doppler frequency graph of central point of scene

图14 传统姿态机动需求计算方法得到的瞄准误差Fig.14 Aiming error of conventional algorithms computing attitude maneuver requirement
5 结论
本文提出了一种基于迭代计算的敏捷SAR卫星聚束模式姿态机动参数计算方法,该方法能适应SAR天线在星体上各种不同的安装位置,并充分考虑了可能存在的波束离轴角,得到了准确的敏捷SAR卫星聚束模式成像所需的姿态参数,经试验验证,地面瞄准误差可达到10-8m量级,可为基于卫星平台姿态机动实现高分辨率星载SAR成像提供支撑。此外,本文提出的方法还可以应用于相控阵体制高分辨率SAR卫星,使其可以通过整星机动减小成像所需的天线电扫描范围,降低对相控阵天线T/R组件的需求,实现整星质量和成本的下降。
References)
[1] J C Curlander,R N McDonough. Synthetic aperture radar: systems and signal processing[M]. Washington D.C.: John Wiley & Sons,Inc,1991
[2]W Carrara,R Goodman,R Majewski. Spotlight synthetic aperture radar signal processing algorithm[M]. Boston: Artech House,1995
[3]J Mittermayer,S Wollstadt,P Prats Iraola,et al. The TerraSAR-X staring spotlight mode concept[J]. IEEE Transactions on Geoscience and Remote Sensing,2014,52(6): 3695-3706
[4]韩晓磊,李世强,王宇,等. 基于敏捷卫星平台的星载SAR Mosaic模式研究[J]. 宇航学报,2013,34(7): 971-979
Han Xiaolei,Li Shiqiang,Wang Yu,et al. A study on space-borne SAR Mosaic mode for an agile satellite [J]. Journal of Astronautics,2013,34(7): 971-979 (in Chinese)
[5]Lemaitre M,Verfaillie G,Jouhaud F. Selecting and scheduling observations of agile satellites[J]. Aerospace Science and Technology,2002,6(5): 367-381
[6]侯小瑾,杨芳,刘胜利,等. 敏捷SAR卫星滑动聚束模式下的控制要求分析[C]//2011年小卫星技术交流会. 北京: 航天东方红卫星有限公司,2011
Hou Xiaojin,Yang Fang,Liu Shengli,et al. Analysis of control demand of sliding spotlight mode based on the agile SAR[C]// 2011 Small Satellite Technique Symposium. Beijing: DFH Co.Ltd.,2011 (in Chinese)
[7]邵晓巍,陶久亮,龚德仁,等. 轻型SAR二维姿态牵引规划与高精度追踪控制[C]//2011年小卫星技术交流会. 北京:航天东方红卫星有限公司,2011
Shao Xiaowei,Tao Jiuliang,Gong Deren,et al. Two dimension attitude planning and high precision tracking control of light SAR[C]// 2011 Small Satellite Technique Symposium. Beijing: DFH Co.,Ltd.,2011 (in Chinese)
[8]张守信. 外弹道测量与卫星轨道测量基础[M]. 北京:国防工业出版社,1992
Zhang Shouxin.Exterior ballistic measurement and satellite orbit measurement[M]. Beijing: National Defence Industry Press,1992 (in Chinese)
[9]魏静波. 视频小卫星姿态控制技术研究[D]. 长沙:国防科学技术大学研究生院,2011
Wei Jingbo. Attitude control technology of a small video satellite [D]. Changsha: Graduate School of National University of Defense Technology,2011 (in Chinese)
[10] 章仁为.卫星轨道姿态动力学与控制 [M]. 北京:北京航空航天大学出版社,1998
Zhang Renwei. Satellite orbit attitude dynamics and control[M].Beijing:Beihang University Press,1998
[11]王睿,杨汝良. 椭圆轨道下雷达多普勒特性估计[J]. 电子与信息学报,2004,26(1): 107-111
Wang Rui,Yang Ruliang. Radar Dopplerpro perties evaluation in elliptic orbits[J]. Journal of Electronics&Information Technology,2004,26(1): 107-111 (in Chinese)
[12]孙志远,张刘,金光,等. 视频小卫星凝视姿态跟踪的仿真与实验[J]. 光学精密工程,2011,19(11): 2715-2723
Sun Zhiyuan,Zhang Liu,Jin Guang,et al. Simulation and experiment on attitude tracking control of small TV satellite[J]. Optics and Precision Engineering,2011,19(11): 2715-2723 (in Chinese)
(编辑:张小琳)
Study on Attitude Maneuver Strategy of Spotlight Mode of Agile SAR Satellite
HAN Xiaolei1ZHANG Qingjun1LIU Jie1ZHANG Running2YUAN Zhi1
(1 Beijing Institute of Spacecraft System Engineering,Beijing 100094,China) (2 DFH Satellite Co., Ltd.,Beijing 100094,China)
In this paper,a new algorithm computing attitude maneuver parameters of spotlight mode is presented for agile SAR satellite. It adequately considers the effects of the position of antenna phase center and the angle departing from coordinate axis. Through vector computation,it acquires initial attitude angles required by spotlight mode of agile SAR satellite. Through iterative computation the errors caused by the position of antenna phase center are removed,and a precise attitude angle is achieved. Finally,the combining simulation results by Matlab and STK confirm the validity of the proposed algorithm.
synthetic aperture radar; agile SAR satellite; spotlight mode; attitude maneuver
2016-03-09;
2016-07-12
国家重大科技专项工程
韩晓磊,男,博士,研究方向为合成孔径雷达卫星工作体制与信号处理。Email:hanxiaolei23@163.com。
TN958
A
10.3969/j.issn.1673-8748.2016.04.003
