一种航天器电加热智能控制策略
2016-03-16张洪波潘宇倩冯文婧王海涛
张洪波 潘宇倩 冯文婧 王海涛
(北京空间飞行器总体设计部,北京 100094)
一种航天器电加热智能控制策略
张洪波 潘宇倩 冯文婧 王海涛
(北京空间飞行器总体设计部,北京 100094)
降低航天器平台各分系统的功率需求是提高航天器承载能力的重要手段之一。部分航天器的热控功率占比偏高,而消耗功率的主要电加热器因控制算法简单,在轨功耗呈现明显的波峰波谷。文章提出了一种旨在优化电加热器总功率的电加热智能控制策略,并根据某导航卫星热设计和在轨遥测数据,选取蓄电池和推力器的加热器为代表进行了仿真分析,结果表明:智能控制策略具有良好的收敛性,蓄电池和推力器的加热器功率需求分别下降50%和45%,可以推广应用到其他航天器。
航天器;控制策略;电加热器;功耗;优化
1 引言
电加热控温方法是目前航天器热控制系统最常用的主动热控技术,其基本设计思路是:由于设备自身的发热量或所处热环境变化大,在设备温度过低时通过电加热提高设备温度,使之满足低温设计极限;电加热控温方法利用电加热器(后文简称加热器)将航天器电能转换为热能来加热设备[1]。
航天器载荷功率是衡量平台能力的重要技术指标之一,在提高整器供电能力的同时,须尽量压缩平台功率,以提高平台承载能力。部分航天器热控功率占比偏高,以我国二代导航系列卫星为例,倾斜地球同步轨道(IGSO)和中地球轨道(MEO)卫星(轨道偏航控制)热控功率占平台总功率的百分比约为40%,而对于地球静止轨道(GEO)卫星(轨道无偏航控制),则占比高达约50%;热控功率的绝大部分乃至全部都用于加热器的供电,因此加热器总功率优化已成为提升航天器平台能力的瓶颈之一。目前,航天器电加热控制策略为简单的高低温阈值策略,即在设备温度低至控温下限时开启加热器,在设备温度高至控温上限时关闭加热器,加热器之间无耦合关系,没有更高层面的智能统筹控制策略,这就导致总功率形成明显的波峰波谷,而整器必须按照极端的峰值进行功率预算,最终导致功率资源的浪费。当前针对航天器电加热控制技术的研究多集中于自主管理[2-4]和高精度控制方向[5-8],尚无以功率优化为目标的控制策略研究。
本文提出一种旨在优化加热器总功率的航天器电加热智能控制策略,在某导航卫星热设计和在轨遥测数据的基础上设计优化方法并进行仿真分析,同时将仿真结果与在轨遥测数据进行了比对。
2 电加热智能控制策略
2.1 控制策略实现思路
加热器智能控制策略实现思路如下。
(1)为了实现优化加热器总功率的目标,考虑以加热器工作的平均功率为控制基准,使功率可在恰当的时机分配给恰当的加热器,在确保被控对象温度符合要求的同时,起到“削峰平谷”的控制效果,以降低总功率需求。
(2)加热器平均功率由各加热器自身功率乘以开启占空比并求和得到,开启占空比可由地面有限元热仿真分析得出,也可根据在轨遥测统计得出。鉴于航天器因热边界条件不同有多种工况,平均功率应为各工况中功率需求最大工况下的平均功率。
(3)鉴于航天器自主温控的发展趋势,控制策略应考虑由星载计算机实现,计算过程尽量简化,不能照搬地面有限元热仿真分析。从简化计算的角度考虑,采取归类优化的思路,将控温范围、热容和热边界条件较为接近的设备加热器归为一类进行统筹考虑。一般同类的设备加热器可归为一类,每类加热器通过智能控制进行“削峰平谷”。
(4)根据设备热容大小确定合适的加热控制周期,每个周期结束后根据设备温度情况对控制策略进行调整,形成反馈调节机制。
(5)航天器舱内设备与舱外设备热特性和热边界条件相差很大:一般舱外设备热容较小,与其他设备热耦合较弱,升降温变化较剧烈;舱内设备热容较大,与同一舱段内其他设备有较强热耦合,升降温变化较缓。因此针对两种情况应分别进行考虑。
2.2 舱内设备加热器控制策略实现方法
图1为舱内设备加热器控制策略实现流程,采用循环迭代的方式进行仿真求解,设备温度、设备向舱板传热速率和加热器总功率须设定初值。本文重点论述电加热智能控制策略,故需对于舱内热分析条件进行简化:①只考虑舱内设备与安装板之间的传导换热;②忽略设备之间,设备与安装板、安装板与其它舱板之间的辐射换热;③安装板等温。设定P为加热器总功率,T0为设备控温目标,ΔP为反馈调节功率,Δt为控制周期和仿真周期,P1为舱板向太空辐射功率,P2为舱段内非电加热设备与安装板间的热交换,P3为舱板吸收的外热流,n为舱段内控温设备数量,Ci为设备热容。设定在t0时刻,Ti为第i个控温设备温度,φi为第i个控温设备向舱板传热速率,Pi为第i个控温设备加热器功率,则Ti、φi、Pi均为已知量。设定在t0+Δt时刻,Ti′为第i个控温设备温度,φi′为第i个控温设备向舱板传热速率,Pi′为第i个控温设备加热器功率,Ti′、φi′、Pi′为待求解量。
t0+Δt时刻第i个控温设备温度:
(1)
t0+Δt时刻第i个控温设备向舱板传热速率φi′的计算如下:
(2)
式中:ε为OSR片发射率,σ为波尔兹曼常数[1],A为舱板散热面积,T1为舱板温度。
(3)
式中:Ai为第i个设备底面积,Ti为设备温度,λ为设备底面与舱板间换热系数,由此得
(4)
而对于两个设备有
(5)
联合求解式(4)和式(5)可以得出φi′。
t0+Δt时刻设备加热总功率:
(6)
式中:T为设备平均温度,反馈调节功率ΔP采用比例控制方式,系数为K。
每个设备的加热功率Pi′需要在总功率P′的基础上进行分配,分配原则是:优先加热温度低的设备。功率分配须考虑每个回路加热器的标称功率P0,对于总功率P无法被标称功率P0整除的情况,须通过占空比进行调节,例如P=1.61P0,则温度最低设备的加热器在本轮控制周期Δt内一直开启,温度次低设备的加热器在本轮控制周期Δt内开启占空比为61%。严格意义上来讲,应计算并比较该组所有设备温度降低到下限所需时间,时间较短的优先加热;但因降温曲线是非线性的,准确计算降温时间需要大量迭代计算,对需要由星载计算机实现控制算法来说负担很重,此外根据前文所述加热器分类优化的原则,控温对象的控温范围、热容和热边界条件较为相近,可以用当前温度的高低代表降温时间的多少。

图1 舱内设备加热器控制策略实现流程图Fig.1 Flow chart of inter heaters control strategy
2.3 舱外设备加热器控制策略实现方法

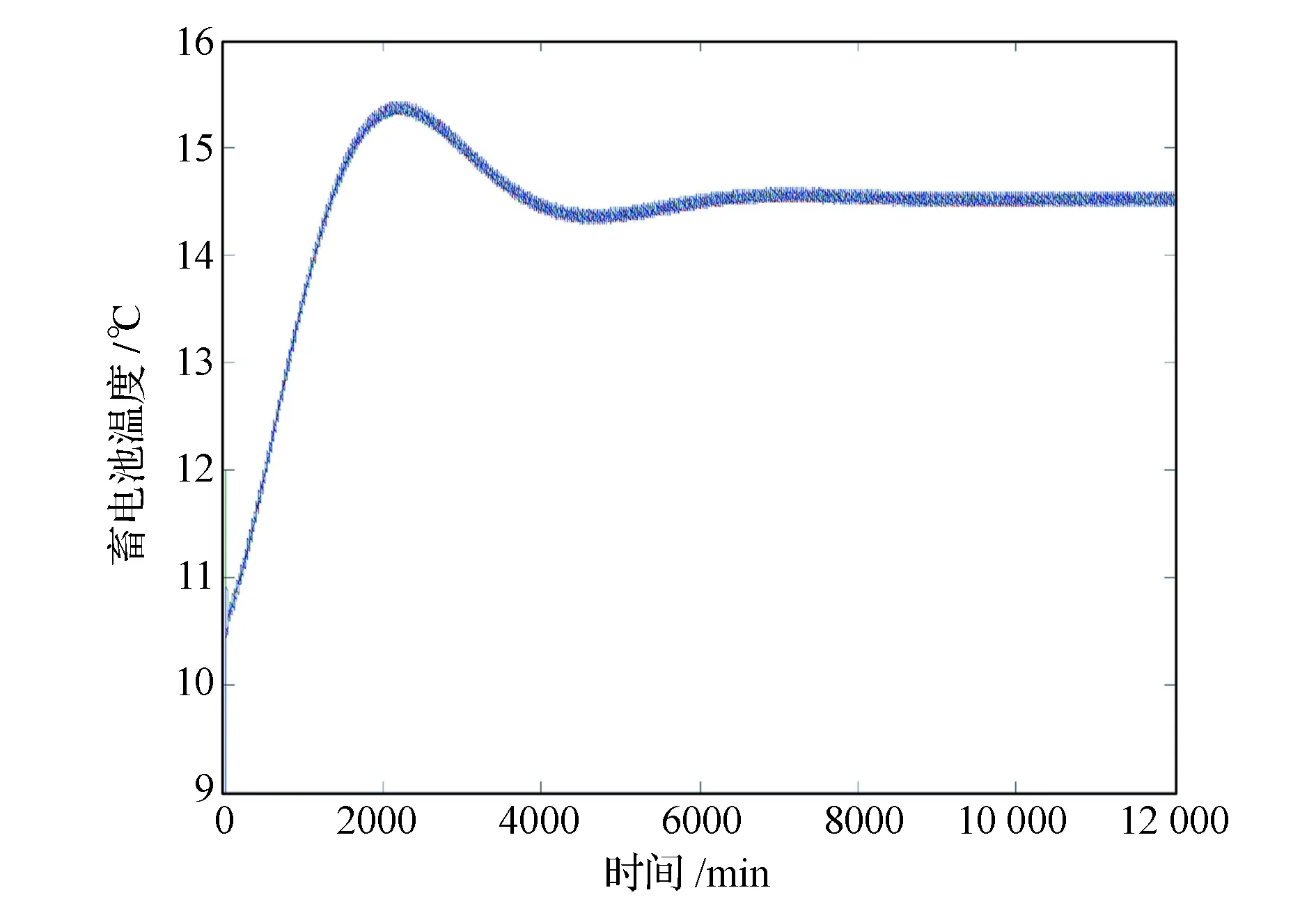
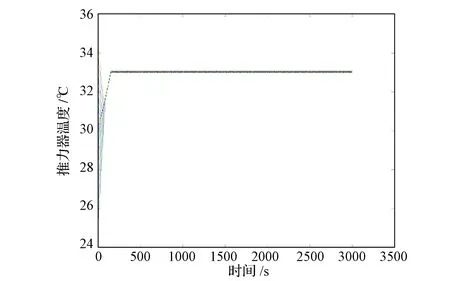
与舱内设备加热器控制策略不同,针对舱外设备温度变化较快的特点,采用每次循环调整工作加热器数量方式调节总功率。r≥N时,选择温度最低的N个加热器开启;当r t0+Δt时刻第i个控温设备温度: 图2 舱外设备加热器控制策略实现流程图Fig.2 Flow chart of outer heaters control strategy (7) 如加热器开启,则Pi=P0,如加热器不开启,则Pi=0。 t0+Δt时刻第i个控温设备向外传热速率: (8) 式中:φT为特定温度TT状态的辐射功率,可根据热分析或在轨遥测数据计算。 3.1 仿真分析对象选取 本文以某IGSO导航卫星为例进行优化分析。该卫星工作轨道舱内加热器包括管路加热器、蓄电池加热器、原子钟加热器等,舱外加热器包括地球敏感器加热器、太阳敏感器加热器、10 N推力器加热器、星敏感器加热器以及各类天线加热器等。 为保证优化和仿真分析验证效果,在确定优化分析对象时依据如下原则: (1)被加热对象的热边界条件清晰、稳定; (2)加热器总功率存在波峰波谷; (3)加热器总功率大小适当,存在优化空间; (4)加热器数量足以充分、有效验证加热器功率智能分配算法; (5)具有一定代表性,可以推广应用到其他航天器。 综上,选择舱内的蓄电池加热器(90 W×4回路,蓄电池共4台,每台1个回路)和舱外的10 N推力器加热器(3.5 W×20回路,推力器共20台,每台1个回路)为代表进行优化和仿真分析。 3.2 舱内蓄电池加热器控制策略仿真分析 蓄电池加热器功率需求最大的工况为地影季的光照期,控温目标为15 ℃,蓄电池处于搁置状态,热耗为0 W。根据工况要求选择地影季光照期且蓄电池搁置状态的遥测数据进行分析,结果为:4个加热器工作(360 W)占比为5.8%,3个加热器工作(270 W)占比为9.3%,2个加热器工作(180 W)占比为24.2%,1个加热器工作(90 W)占比为22.4%,加热器均不工作(0 W)占比为38.3%。平均功率为109.7 W,实际平均温度为14.52 ℃。 根据卫星热设计情况,确定仿真分析参数如下:卫星光学太阳反射镜(OSR)片发射率ε=0.79,玻尔兹曼常数σ=5.67×10-8W/(m2·K4),导热系数对于使用导热硅脂作为填料的情况λ=1000 W/(m2·K)。 选取控温目标为在轨实测平均温度T0=14.52 ℃,时间间隔Δt=1 min,反馈功率系数K=0.005 W/℃,外热流P3=0 W,蓄电池初始温度分别为11 ℃、12 ℃、10 ℃、9 ℃,蓄电池向舱板传热速率初值均为0.1 W,加热器总功率初值100 W。 仿真结果如图3和图4所示,图3为蓄电池温度变化曲线,图4为加热器总功率变化曲线。 仿真结果表明: (1)蓄电池温度、加热器总功率均收敛。 (2)蓄电池平均温度收敛于14.52 ℃,与控温目标一致。 (3)加热器平均功率未超过115 W,最多只开2个加热器,功率需求峰值180 W,比优化前降低50%。目前蓄电池加热器为90 W×4回路,若可以配置为45 W×8回路或30 W×12回路,则会有进一步的优化空间,当然需要更多配电和遥控资源,统筹考虑。 (4)加热器平均功率收敛于108.3 W附近,与在轨实测功率109.7 W相比相差仅1.4 W,此功率之差即为热分析条件简化引起的仿真计算误差,它不会影响温度和平均功率的收敛特性。 图3 4台蓄电池温度变化曲线Fig.3 Temperature of four batteries 图4 加热器总功率变化曲线Fig.4 Total power costs of electric heaters 3.3 舱外10 N推力器加热器控制策略仿真分析 10 N推力器加热器总功率需求最大的工况为工作轨道地影期,控温目标为30~35 ℃,10 N推力器不工作,热耗为0 W。卫星共配置20个10 N推力器,推力器热容Ci=44 J/℃,每个推力器配置3.5W的加热回路,功率预算70W。经选取地影期遥测数据分析,加热器平均占空比为50.38%,加热器总平均功率为70W×50.38%=35.27W。由此近似认为每个10N推力器在32.5 ℃的情况下辐射效率为35.27W/20=1.76W。 仿真分两个工况进行。工况一:取Δt=1s,推力器初始温度为15~24.5 ℃(每0.5 ℃间隔),初始工作加热器数量为0,外热流PW=0W。工况二:取Δt=1 s,推力器初始温度为25~34.5 ℃(每0.5 ℃间隔),初始工作加热器数量为0,外热流PW=1.5 W×10=15 W,即其中10个推力器受到1.5 W的外热流。 两种工况推力器温度变化曲线和加热器数量变化曲线如图5~图8所示。 仿真结果表明: (1)两种工况均具有良好的收敛特性,均将推力器温度控制到33 ℃。 (2)两种工况加热器总功率未超过3.5 W×11=38.5 W,比优化前降低45%。 (3)工况二中,推力器外热流未超过自身辐射功率(1.76 W),因此温度仍收敛于33 ℃,稳态加热器总功率下降至20.3 W。 图5 推力器温度变化曲线(工况一)Fig.5 Temperature of engines (case 1) 图6 加热器数量变化曲线(工况一)Fig.6 Number of heaters (case 1) 图7 推力器温度变化曲线(工况二)Fig.7 Temperature of engines (case 2) 图8 加热器数量变化曲线(工况二)Fig.8 Number of heaters (case 2) 本文提出的航天器电加热智能控制策略具有良好的收敛性,优化对象为某导航卫星的蓄电池加热器和推力器加热器功率需求分别下降50%和45%,优化效果显著,且鉴于二者的代表性,本文的控制策略可以推广应用到其他航天器。 References) [1] 侯增祺,胡金刚.航天器热控制技术 [M].北京:中国科学技术出版社,2007 Hou Zengqi,Hu Jingang. Spacecraft thermal control technology[M].Beijing: China Science and Technology Press,2007 (in Chinese) [2]郭坚,陈燕,邵兴国.航天器热控自主管理中的智能控制技术[J].航天器工程,2012,21(6):49-53 Guo Jian,Chen Yan,Shao Xingguo. Intelligent control technology for spacecraft thermal autonomous management[J]. Spacecraft Engineering,2012,21(6):49-53 (in Chinese) [3]付秀敏.航天器自主控温系统设计[D].西安:西安电子科技大学,2011 Fu Xiumin. Spacecraft independent temperature control system design[D]. Xi’an: Xidian University,2011 (in Chinese) [4]左洋,杨耀东,宋杰,等.智能温控技术在航天器部件常压高低温试验中的应用[J]. 真空与低温,2015,21(2):113-118 Zuo Yang,Yang Yaodong,Song Jie,et al. Application of intelligent temperature control technology in the experiment under atmospheric pressure and high/low temperature test for components of spacecraft [J]. Vacuum & Cryogenics,2015,21(2):113-118 (in Chinese) [5]董伟. 基于改进的PID算法的小卫星高精度温控系统[D].西安:西安电子科技大学,2011 Dong Wei. High precision temperature control system of small satellite based on modified PID algorithm [D]. Xi’an: Xidian University,2011 (in Chinese) [6]李国强,耿利寅,童叶龙. 航天器铷钟的一种精密控温系统[J].航天器工程,2011,20(4):93-98 Li Guoqiang,Geng Liyin,Tong Yelong. A precise temperature control system for spacecraft rubidium atomic clock [J]. Spacecraft Engineering,2011,20(4):93-98 (in Chinese) [7]常霞,张鹏,李恺,等. 一种轻小型遥感相机高精度主动热控设计[J].计算机测量与控制,2014,22(7):2274-2276 Chang Xia,Zhang Peng,Li Kai,et al. Design of high precision control of space camera temperature controlling [J].Computer Measurement & Control,2014,22(7):2274-2276 (in Chinese) [8]徐志明.卫星高精度温度控制技术研究[C]//2011年小卫星技术交流会.北京:航天东方红卫星有限公司,2011:29-34 Xu Zhiming. Research of satellite high precise thermal control [C]// The 2011 Conference on Small Satellite Technology. Beijing: DFH Satellite Co.,Ltd.,2011:29-34 (in Chinese) (编辑:李多) An Intelligent Control Strategy of Spacecraft Electric Heating ZHANG Hongbo PAN Yuqian FENG Wenjing WANG Haitao (Beijing Institute of Spacecraft System Engineering,Beijing 100094,China) Reducing the power cost of platform subsystems is one of the most important ways to improve the carrying capacity of a spacecraft. The power of thermal control subsystem is higher compared to other platform subsystems. Electric heaters cost most of the power and wave distinctly because of the simple control way. This paper brings forward an intelligent control strategy aiming at optimizing the power costs of electric heaters,and simulates the heaters power costs of batteries and engines in view of the thermal subsystem design and on-orbit data of some navigation satellite. The results realize that this strategy converges stably,and the power costs of batteries and engines descend by 50 percent and 45 percent respectively,which can be popularized to other spacecraft. spacecraft;control strategy;electric heaters;power cost; optimization 2016-04-12; 2016-05-25 国家重大航天工程 张洪波,男,高级工程师,研究方向为航天器总体设计。Email:zhanghb03@126.com。 V423.4 A 10.3969/j.issn.1673-8748.2016.04.008
3 仿真分析




4 结束语