GEO卫星电推力器安装位置优化研究
2016-03-16李强周志成袁俊刚王敏
李强 周志成 袁俊刚 王敏
(中国空间技术研究院通信卫星事业部,北京 100094)
GEO卫星电推力器安装位置优化研究
李强 周志成 袁俊刚 王敏
(中国空间技术研究院通信卫星事业部,北京 100094)
针对配置电推力器的地球静止轨道(GEO)卫星,研究了以位置保持效率为指标的电推力器最佳安装位置。分析了南北、东西位置保持所需推力大小与工作时间的关系,得到推力器安装位置与位置保持可控性的定量关系。分析了电推力器安装位置与角动量卸载能力的关系,电推力器的推力方向越接近垂直,角动量卸载能力越大。以位置保持效率为最优目标,考虑卫星尺寸、位置保持可控性和角动量卸载能力等约束条件,给出了电推力器最优安装位置的确定方法:根据位置保持效率及卫星尺寸约束,确定电推力器纵向与垂向安装位置;根据位置保持可控性和角动量卸载能力等约束条件,确定电推力器横向安装位置。利用一个典型优化算例对此方法进行验证,结果表明:该优化方法能够确定满足约束条件下的电推力器最优安装位置,可为GEO卫星电推进系统的布局设计提供参考。
地球静止轨道卫星;电推力器;最优安装位置;位置保持;角动量卸载
1 引言
电推进技术通过电能驱动工质高速喷出获得推力,具有高比冲、低推力、长寿命等特点[1-3]。目前,越来越多的地球静止轨道(GEO)卫星开始配置电推力器执行在轨位置保持及角动量卸载等任务。矩形布局是GEO卫星上电推力器配置的一种常见构型[4](如波音-702卫星平台[5-6]),即4台电推力器通过矢量调节机构安装于卫星背地板,推力方向通过质心,4台电推力器在背地板上的布局呈矩形。该布局的优点是同时兼顾了东西、南北方向的位置保持控制与角动量卸载能力,能够避免电推力器羽流对太阳翼等其他部件的影响,同时,在1~2台推力器故障的情况下仍能够保证位置保持与卸载能力。文献[7]中分析了执行位置保持与角动量卸载任务的几种电推力器布局,认为配置4台电推力器进行位置保持与角动量卸载的卫星,矩形布局具有最高的冗余度。
GEO卫星电推力器安装位置是电推进系统布局设计的重要参数,其直接决定位置保持效率,即决定了在轨推进剂消耗。在全电推进卫星电推力器布局设计过程中,由于存在多种复杂约束条件且互相耦合,尚无有效地直接确定电推力器最优安装位置的方法,通常采用迭代设计过程,利用仿真验证各指标是否满足设计要求。
本文针对配置矩形布局电推力器的全电推进卫星,分析了电推力器安装位置与位置保持效率、位置保持可控性及角动量卸载能力之间的关系,以位置保持效率最高为指标,给出了一种确定电推力器最优安装位置的方法,并通过仿真算例验证了该方法的有效性。
2 电推进位置保持与角动量卸载原理
2.1 电推力器安装位置描述
图1为卫星在轨正常对地姿态及矩形布局电推力器示意,4台电推力器通过2自由度的矢量调节机构安装于卫星背地板,正常工作时推力方向通过卫星质心,须要进行角动量卸载时,矢量调节机构调整推力方向偏离质心,产生卸载力矩。坐标系原点O为卫星质心,X,Y,Z轴分别指向卫星特征轴,卫星正常对地姿态下,X轴指向正东(轨道切向),Y轴指向正南(轨道负法向),Z轴指向地心。
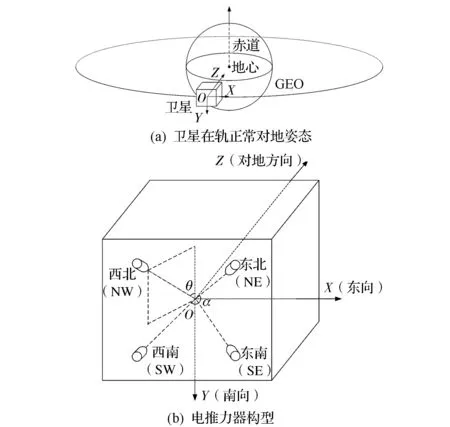
图1 卫星在轨正常对地姿态及电推力器布局示意Fig.1 Nadir alignment attitude of satellite and layout of electric thrusters
电推力器安装位置可由2组参数描述:电推力器推力作用点在卫星质心坐标系下的坐标(x,y,z);电推力器推力方向的仰角θ和偏角α。其中:x,y,z分别称为电推力器横向安装位置、纵向安装位置和垂向安装位置;θ为推力方向与Y轴的夹角,α为推力方向在XOZ面的投影与Z轴的夹角。θ,α与x,y,z的关系为
(1)
卫星正常对地姿态下,电推力器推力沿轨道径向、切向、法向的投影系数KR,KT,KN,可由电推力器安装位置坐标(x,y,z)确定,即
(2)
2.2 电推进位置保持的最小推力需求
GEO位置保持控制分为南北位置保持与东西位置保持[8-9]。电推进位置保持相比化学推进的最大区别是南北、东西位置保持联合控制,即电推力器在受摄轨道的升降交点进行南北位置保持[10],同时,电推力器提供切向推力分量进行东西位置保持。北侧电推力器(NW与NE)依次在轨道升交点点火,南侧电推力器(SW与SE)依次在轨道降交点点火,所有电推力器的法向冲量(推力与点火时间的乘积)总和满足南北控制要求,切向推力冲量的代数和满足东西控制要求。因此,电推进位置保持的总推进剂消耗等于南北位置保持所需的推进剂消耗。推力的法向投影系数KN表示了南北位置保持控制量与位置保持总控制量的比值,即代表位置保持效率。
电推力器每天都执行位置保持操作,地面定期制定电推力器点火计划,由星上自主执行。南北位置保持所需的法向控制量与东西位置保持所需的切向控制量(用速度增量表示)分别为[11]
(3)

电推力器推力较小,需要的工作时间较长,速度增量ΔVN,ΔVT与电推力器工作时间ΔtN,ΔtT的关系为
(4)
式中:Fp为电推力器推力;m为卫星质量;Δl为电推力器点火弧段的弧角。
点火弧段的存在表示南北位置保持过程存在弧段损失,弧段越长,损失越大,而平经度控制与电推力器点火位置无关,不存在弧段损失。由式(4)可知,在给定的位置保持任务,不同推力大小对应的电推力器工作时间不同。图2给出了执行南北、东西位置保持任务的电推力器推力大小与每天工作时间的关系曲线(横坐标轴为对数坐标),图3给出了对应的推力大小与推进剂消耗的关系曲线(横坐标轴为对数坐标),卫星质量取2000kg,电推力器比冲取3000s,倾角漂移速率和平经度漂移加速度均取最大值,位置保持周期为1天。
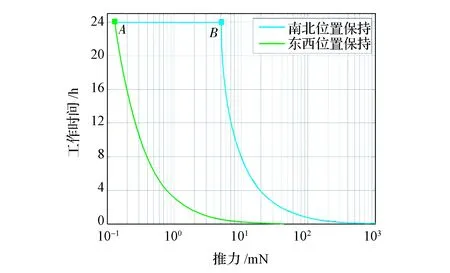
图2 推力与工作时间的关系Fig.2 Relationship between thrust and operating time
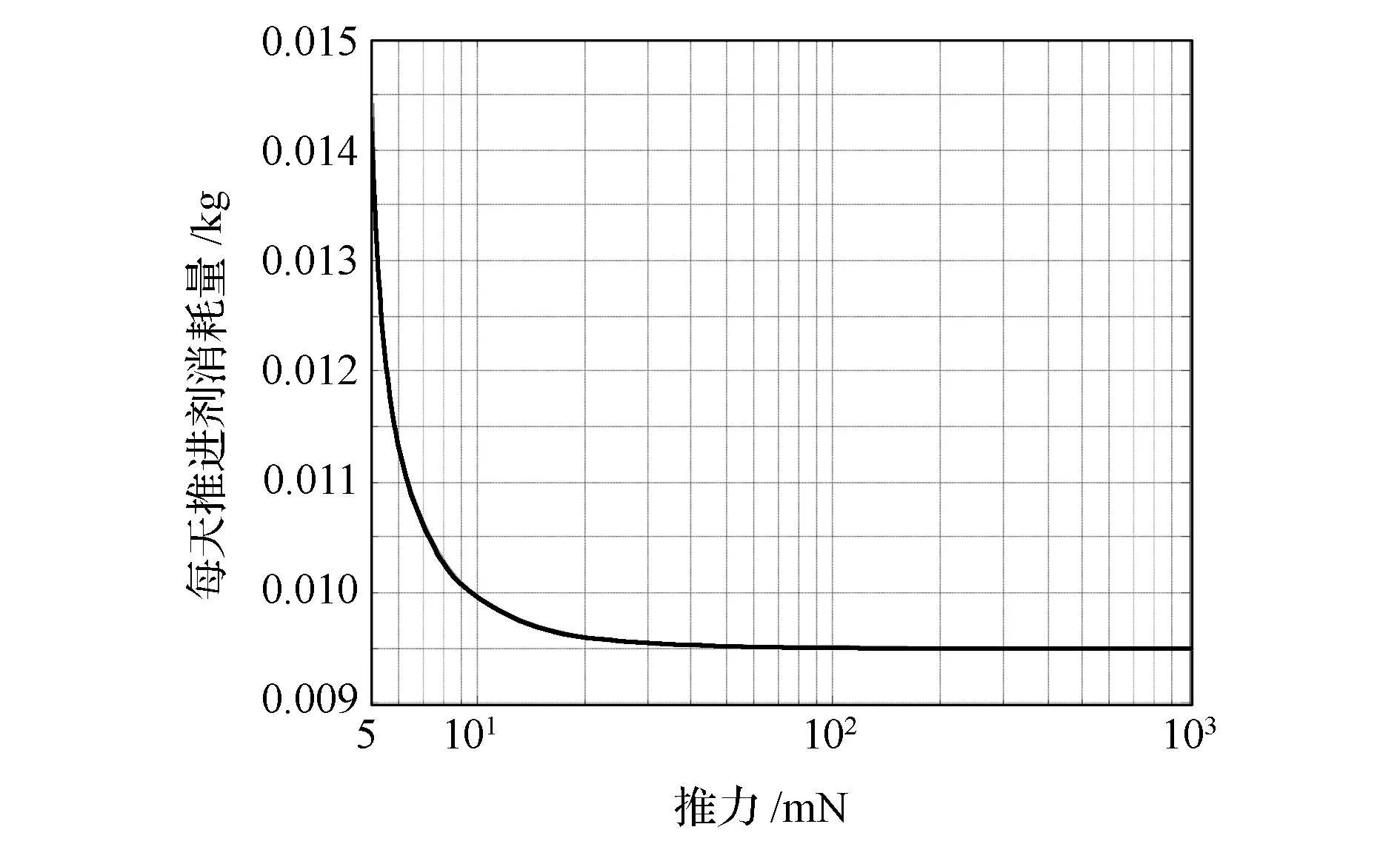
图3 推力与每天推进剂消耗量的关系Fig.3 Relationship between thrust and daily propellant consumption
由图2和图3可知:南北位置保持在推力小于5.10mN时(图2中B点),每天工作时间将超过24h,南北位置保持将不可控;东西位置保持在推力小于0.13mN时(图2中A点),每天工作时间将超过24h,东西位置保持将不可控。此外,推力较小时,存在较大的弧段损失,推进剂消耗较高,实际的电推进位置保持仅允许电推力器每天工作1~4h,因此电推力器推力至少应不低于20.00mN,同时弧段损失也应处于较低的水平。
2.3 电推进角动量卸载能力
电推进角动量卸载需要由矢量调节机构驱动电推力器,使推力方向偏离质心产生卸载力矩,由于卫星在轨工作期间不允许2台及以上电推力器同时点火工作,且矢量调节机构只具有2个转动自由度,推力方向的调节范围较小(5°左右),单台电推力器所能产生的卸载力矩位于与推力方向垂直的平面内,不具备全向卸载能力,因此,2台及以上电推力器组合进行多次间隔点火工作,才能进行3轴角动量卸载。一般情况下,4台电推力器按对角线分为2组(NW与SE,SW与NE),互为备份,每组均能单独完成位置保持与角动量卸载。卸载能力应针对对角线电推力器组合(NW与SE,或SW与NE)进行分析。
2台电推力器的推力方向越接近垂直,则总的卸载能力越强[12],以NW与SE电推力器组合为例,其安装角度分别为(θ1,α1)和(θ2,α2),推力方向矢量分别为
(5)
考虑2台电推力器点火赤经间隔,定义2台电推力器推力方向的夹角为
(6)
式中:CY(Δλ)表示绕Y轴旋转Δλ角的方向余弦矩阵。
正常模式下,点火赤经间隔Δλ=180°,因此
(7)
当α=0时,ψ=0,2台电推力器推力方向平行,不具备卸载能力;α越小,2台电推力器推力方向越接近平行,卸载能力越弱;当ψ=±90°时,卸载能力最大,此时α满足
(8)
3 电推力器最优安装位置
电推力器最优安装位置应使位置保持效率KN最高。从式(2)可以看出:横向、垂向安装位置x,z越小,位置保持效率越高;纵向安装位置y越大,位置保持效率越高。由于电推力器安装在背地板上,垂向安装位置z由卫星质心位置决定,即整星质心到背地板的距离加上电推力器高度;横向、纵向安装位置x,y在背地板尺寸约束下可自由调整。根据位置保持效率最高的要求,纵向安装位置y应取背地板约束下的最大值,即电推力器应安装在背地板南北方向边缘。横向安装位置x越小,位置保持效率越高,x的最小值应由约束条件确定,主要有电推力器尺寸约束、位置保持可控性约束和角动量卸载能力约束。
3.1 电推力器尺寸约束
电推力器尺寸约束表示东、西两侧电推力器安装不发生干涉,即横向安装位置x不得小于电推力器外包络半径xT(x≥xT)。
3.2 位置保持可控性约束
位置保持可控性约束表示推力的法向分量、切向分量应不小于南北、东西位置保持所需的控制量,即
(9)
式中:FN,FT分别为南北、东西位置保持所需的推力大小,与卫星质量m和每天工作时间Δt有关。
(10)
由于纵向安装位置y按照卫星尺寸约束取最大值,一般能够满足南北位置保持可控条件,横向安装位置x应满足东西位置保持可控条件,由式(9)可得
(11)
令式(11)取等号,则可得到位置保持可控性约束条件确定的最小横向安装位置xS,横向安装位置x不得小于此值,即x≥xS。
3.3 角动量卸载能力约束
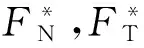
角动量卸载能力约束表示任意对角线电推力器组合,在一定时间Δt内具有的全向角动量卸载能力不低于指定值。以NW与SE电推力器组合为例,其推力方向夹角为ψ,卸载能力最弱的方向为任意一台电推力器的推力方向。假设一定时间Δt内,在电推力器NW推力方向上有角动量h需要卸载(如图4所示),则需要电推力器NW和电推力器SW卸载的角动量如下。
(12)
电推力器所能产生动量变化的最大值,受其转角上限Δαmax约束,即
(13)
式中:dr为推力作用点到质心的距离。
在电推力器NW推力方向上所能卸载的最大角动量为
(14)
hmax也代表了在Δt内推力器转角上限Δαmax约束下,电推力器NW和SE组合的全向最低卸载能力。若角动量卸载需求为hneed,则角动量卸载能力约束可表示为
(15)
令式(15)取等号,则可得到角动量卸载能力约束条件确定的最小横向安装位置xM,横向安装位置x不得小于此值,即x≥xM。
综上所述,电推力器尺寸约束条件、位置保持可控性约束条件和角动量卸载能力约束条件可分别确定3个最小横向安装位置xT,xS,xM,最优横向安装位置应取其中最大值,即x=max(xT,xS,xM)。
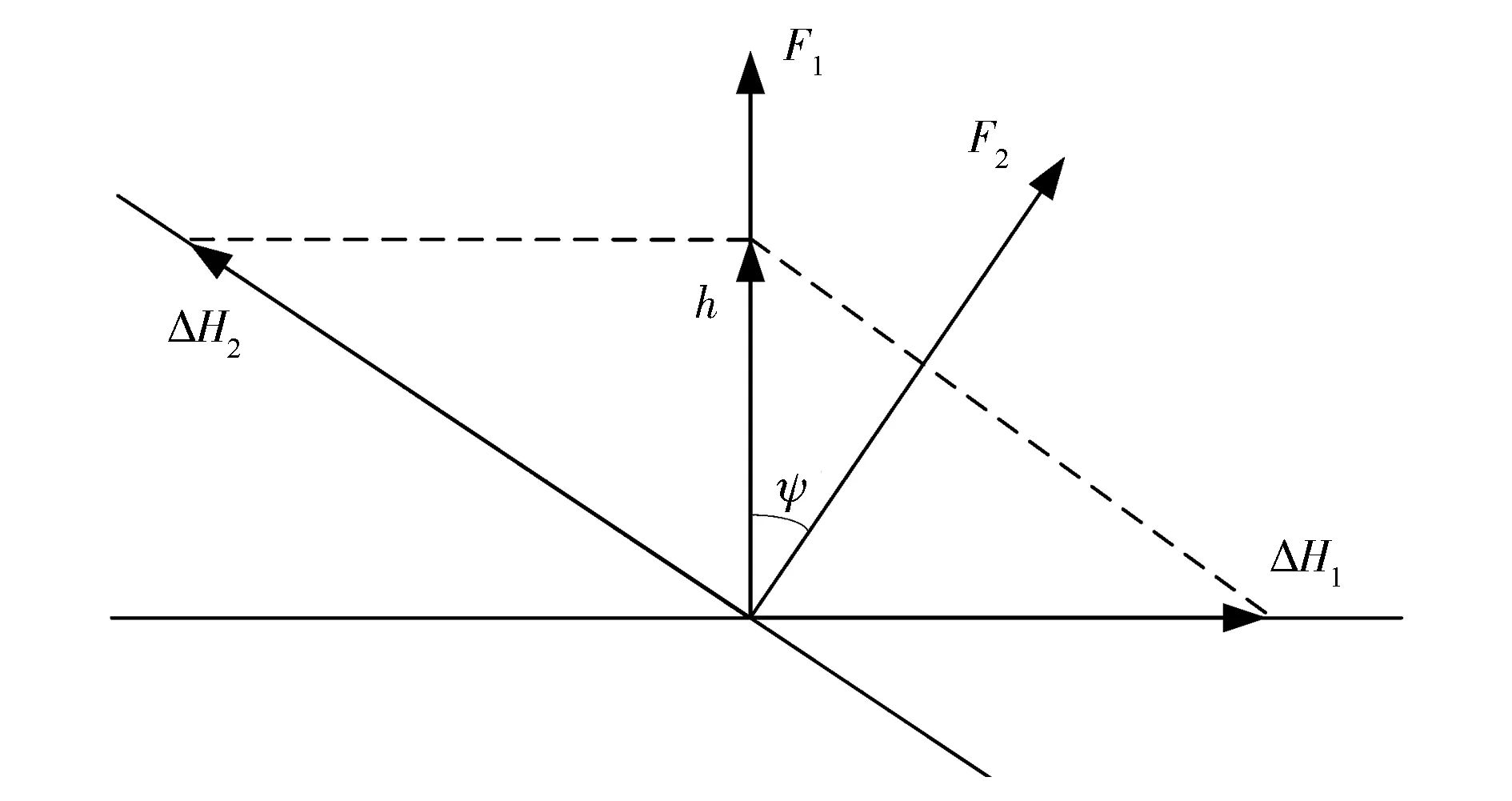
图4 电推力器组合卸载角动量示意Fig.4 Angle momentum dumping example by using a couple of thrusters
4 计算实例
设某型电推进GEO卫星背地板尺寸为2m×2m,卫星在轨质量为2000kg,整星质心到背地板距离为1m;某型电推力器标称推力为100mN,比冲为3500s,电推力器高度为300mm,外包络半径为150mm;每天电推力器工作时间限制为2h,卸载时间为2h,卸载能力要求为每天全向15N·ms。根据卫星参数,首先可以确定电推力器纵向、垂向最优安装位置,y=1.0 m,z=-1.3 m;然后根据电推力器尺寸约束、位置保持可控性约束和角动量卸载能力约束,确定最优横向安装位置。
1)电推力器尺寸约束
根据电推力器尺寸约束条件,x≥150 mm。
2)位置保持可控性约束
根据卫星质量为2000 kg、电推力器工作时间为2 h,可在图2中得到南北、东西位置保持最小推力需求,FN=39.2 mN,FT=1.6 mN。图5给出了横向安装位置从0到300 mm变化时对应的推力在3轴上的分量大小。由图5可知,法向推力FY随着横向安装位置x的增加而略有下降,在0~300mm内都能满足FY>FN,符合南北位置保持的最小推力需求。切向推力分量FX随着横向安装位置x的增加而增加。根据式(11),FX≥FT=1.6 mN,可得到最小横向安装位置x为40.8mm。
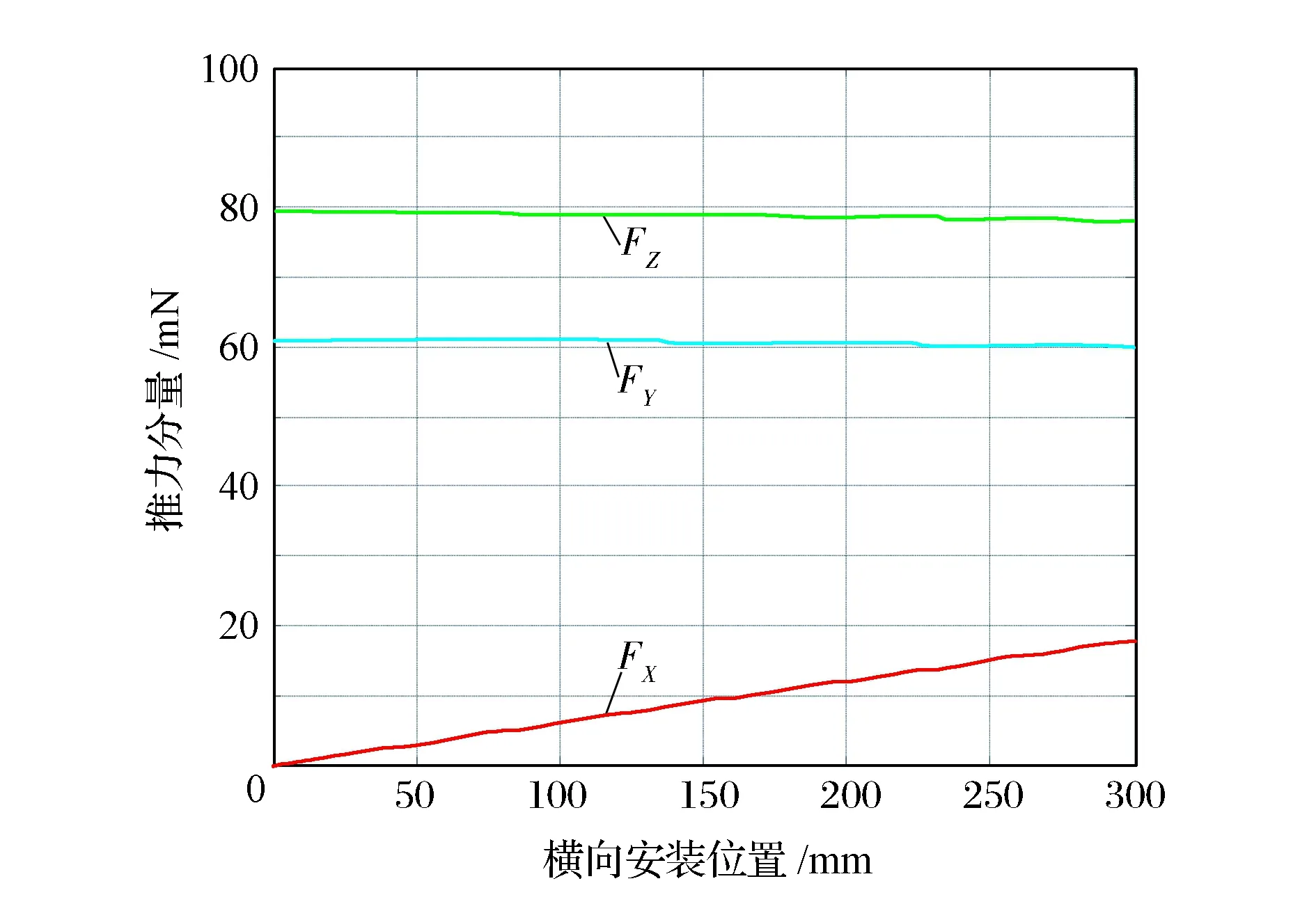
图5 推力分量与横向安装位置的关系Fig.5 Relationship between thrust component and transverse installation position
3)角动量卸载能力约束
角动量卸载能力要求在推力器转角上限Δαmax为5°,对角线电推力器组合工作时间Δt为2 h,以及全向角动量卸载能力不低于15 N·ms时,由式(7)结合式(15)得到角动量卸载能力hmax与横向安装位置x的关系,如图6所示。由图6可知,在全向角动量卸载能力不低于15N·ms时,横向安装位置x≥118.9 mm。
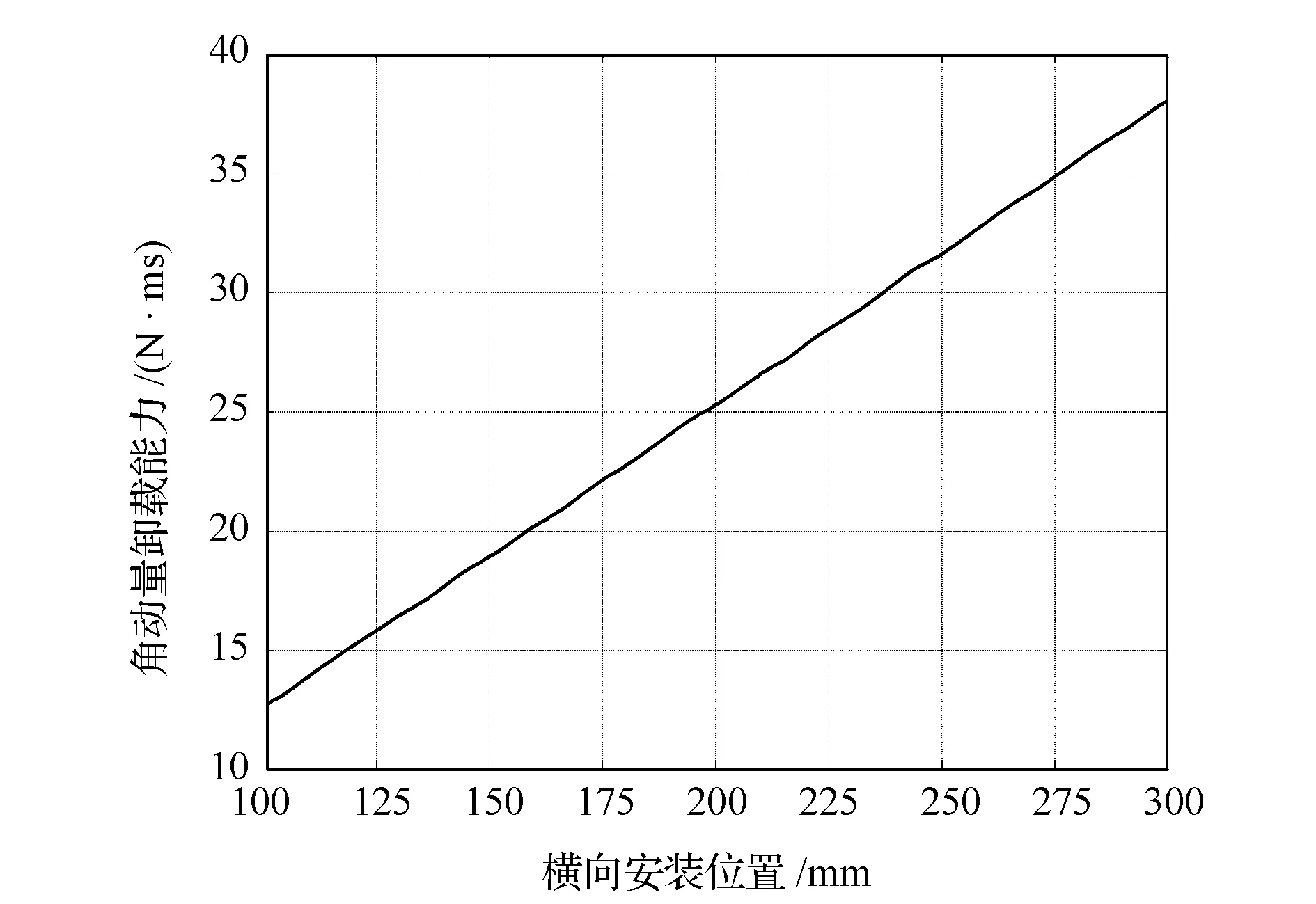
图6 角动量卸载能力与横向安装位置的关系Fig.6 Relationship between angle momentum dumping ability and transverse installation position
综上所述,电推力器最优横向安装位置为150 mm,4台电推力器在背地板上的最优安装位置见表1。由表1可知,优化后的位置保持效率为60.81%,能保证每天电推力器工作时间2 h时位置保持可控,同时具备不低于15 N·ms的全向角动量卸载能力。

表1 电推力器最优安装位置Table 1 Optimized installation location of electric thrusters
5 结束语
GEO卫星配置电推力器将带来很高的效益[13-16],在不同的电推力器布局方案中,矩形布局具有较好的综合性能。本文针对矩形布局的全电推进卫星电推力器的最优安装位置进行了研究,分析了电推进南北、东西位置保持对推力的需求,以及电推力器安装位置与角动量卸载能力的关系。基于位置保持效率最高的要求,给出了一种最优安装位置确定方法。首先,根据卫星尺寸确定电推力器纵向安装位置和垂向安装位置;然后,根据电推力器尺寸约束、位置保持可控性约束和角动量卸载能力约束,确定横向安装位置,从而确定电推力器最佳安装位置。针对某型全电推进卫星的设计参数,给出了优化算例。结果表明:保证电推力器每天工作2 h的情况下,位置保持可控,具备每天15 N·ms的全向角动量卸载能力。该方法可为全电推进卫星电推力器布局设计提供参考。
References)
[1] 刘江,赵宏.卫星电推进应用技术现状及发展[C]//全国第十二届空间及运动体控制技术学术年会论文集.北京:中国自动化学会,2006:438-441
Liu Jiang,Zhao Hong. Current situation and development of satellite electric propulsion technology [C]//Proceedings of the 12th Space and Motion Control Technology Conference. Beijing: Chinese Association of Automation,2006: 438-441 (in Chinese)
[2]魏延明.国外卫星推进技术发展现状与未来20年发展趋势[J].航天制造技术,2011(2):7-12
Wei Yanming. Current situation and developing direction of foreign satellite propulsion technology in the next 20 years [J]. Aerospace Manufacturing Technology,2011(2): 7-12 (in Chinese)
[3]温正,王敏,仲小清.多任务模式电推进技术[J].航天器工程,2014,23(1):118-123
Wen Zheng,Wang Min,Zhong Xiaoqing. Multitask mode electric propulsion technologies [J]. Spacecraft Engineering,2014,23(1): 118-123 (in Chinese)
[4]边炳秀,魏延明.电推进系统在静止轨道卫星平台上应用的关键技术[J].空间控制技术与应用,2008,34(1):20-24
Bian Bingxiu,Wei Yanming. Key techniques for the application in the geostationary of the electric propulsion system satellite platform [J].Aerospace Control and Application,2008,34(1): 20-24 (in Chinese)
[5]B Anzel. Stationkeeping the Hughes HS 702 satellite with a xenon ion propulsion system [C] //Proceedings of the 49th International Astronautical Congress. Paris:IAF,1998: 1-14
[6]Steven A Feuerborn1,David A Neary. Finding a way: Boeing’s “All Electric Propulsion Satellite”[C]//Proceedings of the 49th AIAA/ASME/SAE/ASEE Joint Propulsion Conference. Washington D.C.: AIAA,2013: 1-5
[7]D Rex,B Kohnecke. Redundant configuration of electric propulsion systems for stationkeeping [J]. Journal Spacecraft,1974,11(7): 488-493
[8]章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,2006
Zhang Renwei. Satellite orbit and attitude dynamics and control [M]. Beijing: Beihang University Press,2006 (in Chinese)
[9]李恒年.地球静止卫星轨道与共位控制技术[M].1版.北京:国防工业出版社,2010
Li Hengnian. Geostationary satellite orbital analysis and collocation strategies [M]. 1st ed. Beijing: National Defense Industry Press,2010 (in Chinese)
[10] 李于衡.地球静止轨道通信卫星位置保持原理及实施策略[J].飞行器测控学报,2003,22(4):53-61
Li Yuheng. The principle of station-keeping and maneuver strategies of geostationary communication satellites [J]. Journal of Spacecraft TT&C Technology,2003,22(4): 53-61 (in Chinese)
[11]刘坤,邹爽,王江永,等.基于LIPS-200电推进系统在GEO卫星平台上的布局研究[J].真空与低温,2014,20(1):23-28
Liu Kun,Zou Shuang,Wang Jiangyong,et al. Study on LIPS-200 electric propulsion system configuration on GEO satellite bus [J]. Vacuum & Cryogenics,2014,20(1): 23-28 (in Chinese)
[12]Donald Chu,Sam Chen,Derrick Early,et al. GOES-R stationkeeping and momentum management [C]//Proceedings of the 29th Annual AAS Guidance and Control Conference. Breckenridge,Colorado: AAS Publications Office,2006:1-13
[13]田立成,赵成仁,孙小菁.电推进器在GEO静止卫星上的安装策略[J].真空,2014,51(2):70-73
Tian Licheng,Zhao Chengren,Sun Xiaojing. Electric propulsion installation strategy on GEO satellite [J]. Vacuum,2014,51(2): 70-73 (in Chinese)
[14]张天平,田华兵,孙运奎.离子推进系统用于GEO卫星南北位保使命的能力与效益[J].真空与低温,2010,16(2):72-77
Zhang Tianping,Tian Huanbing,Sun Yunkui. Capabi-lity and benefit of the LIPS-200 system for NSSK mission of GEO satellites [J]. Vacuum & Cryogenics,2010,16(2): 72-77 (in Chinese)
[15]Thomas J Kelly,Lisa K White,Donald W Gamble. Stationkeeping of geostationary satellites with simultaneous eccentricity and longitude control [J].Journal of Guidance,Control,and Dynamics,1994,17(4): 769-777
[16]李建成,吴梅,余培军,等.卫星倾角位置保持策略研究[J].弹箭与制导学报,2006,6(1):275-277
Li Jiancheng,Wu Mei,Yu Peijun,et al. A study on south/north maneuver of geostationary satellite [J]. Journal of Projectiles,Rockets,Missiles and Guidance,2006,6(1): 275-277 (in Chinese)
(编辑:夏光)
Optimization Analysis of Electric Thrusters Installation Location on GEO Satellite
LI Qiang ZHOU Zhicheng YUAN Jungang WANG Min
(Institute of Telecommunication Satellite,China Academy of Space Technology,Beijing 100094,China)
Aiming at the electric thrusters’ installation location on GEO satellite,the optimization installation location of electric thrusters based on stationkeeping efficiency is studied. The relationship between operating time and thrust which is needed by NSSK and EWSK is analyzed,then the relationship between stationkeeping controllability and the electric thrusters installation location is given. The relationship between the electric thrusters installation location and angle momentum dumping capability is also analyzed,which reveals that the angle momentum dumping capability achieves maximum when the orientation of two thrusters is orthogonal. The method to determine optimization installation location of the thrusters is introduced,taking into consideration the stationkeeping controllability,angle momentum dumping capability and thrusters size. The longitudinal and perpendicular position is determined by stationkeeping efficiency and satellite size,while the transverse position is determined by the stationkeeping controllability and angle momentum dumping capability. Finally a typical optimization example is provided,which reveals that this method can determine the optimized installation location of the thrusters. This method can provide a reference to the electric thrusters layout design.
GEO satellite; electric thruster; optimized installation location; stationkeeping; angle momentum dumping
2015-12-08;
2016-05-05
国家重大航天工程
李强,男,硕士研究生,研究方向为航天器动力学与控制。Email:liqiang18201@126.com。
V414.1
A
10.3969/j.issn.1673-8748.2016.04.006