一种提高机相扫雷达波束扫描精度的方法
2016-02-23张晓平朱金门
张晓平,陆 健,朱金门
(南京电子技术研究所, 南京 210039)
·信号处理·
一种提高机相扫雷达波束扫描精度的方法
张晓平,陆 健,朱金门
(南京电子技术研究所, 南京 210039)
在机相扫雷达系统中,波束扫描精度不仅决定探测目标的测角、测距精度,甚至影响跟踪、截获目标的成败。文中论述波束扫描的实现途径,提出按脉冲重复频率(PRF)实时计算波束指向参数的方法。该方法提高了波束扫描的精度,改善了目标起伏特性,增强了雷达系统的跟踪精度和威力。对于动平台雷达系统的设计与应用具有重要的参考价值。
机相扫雷达;脉冲重复频率;波束指向;边跟踪边搜索
0 引 言
机相扫雷达是指采用一维或两维相扫加方位机械扫描工作方式的雷达,此时回波脉冲的幅度受天线方向图的调制。为了减小天线阵面转动引起的回波幅度的变化,在每个波位驻留(或每帧),都要对波束指向进行实时修正,雷达控制系统在每帧采集天线阵面法线相对于正北的角度、动态水平仪的水平偏差角等参数,实时计算出当前帧的波束指向,使波束按照我们预定的设想空域照射,达到搜索、截获、跟踪目标的目的。
现代雷达为了提高目标检测性能,普遍采用多脉冲积累技术,也就是在一个驻留(帧)发射多个脉冲[1]。由于机相扫雷达在波束相扫的同时,机械角度也在变化,在雷达天线阵面转速较快、多脉冲波位驻留时间较长的情况下,由于波束指向信息是按帧计算,而不是按脉冲重复周期(PRF)计算,从本帧第二个脉冲开始,波束指向信息中使用阵面角度等信息非当前脉冲时的阵面角度信息,严重影响了当前波束扫描的精度[2]。
为此,我们通过按PRF来计算波束指向参数,来提高波束扫描的精度,解决上述问题。
1 波束指向计算
在雷达系统中,一般由数据处理、雷达控制和波控共同决定天线波束的扫描方法。图1为重置波束指向的实现框图。下面以一种航管双面辐射机相扫雷达为例,来说明重置波束指向的具体步骤[3-4]。
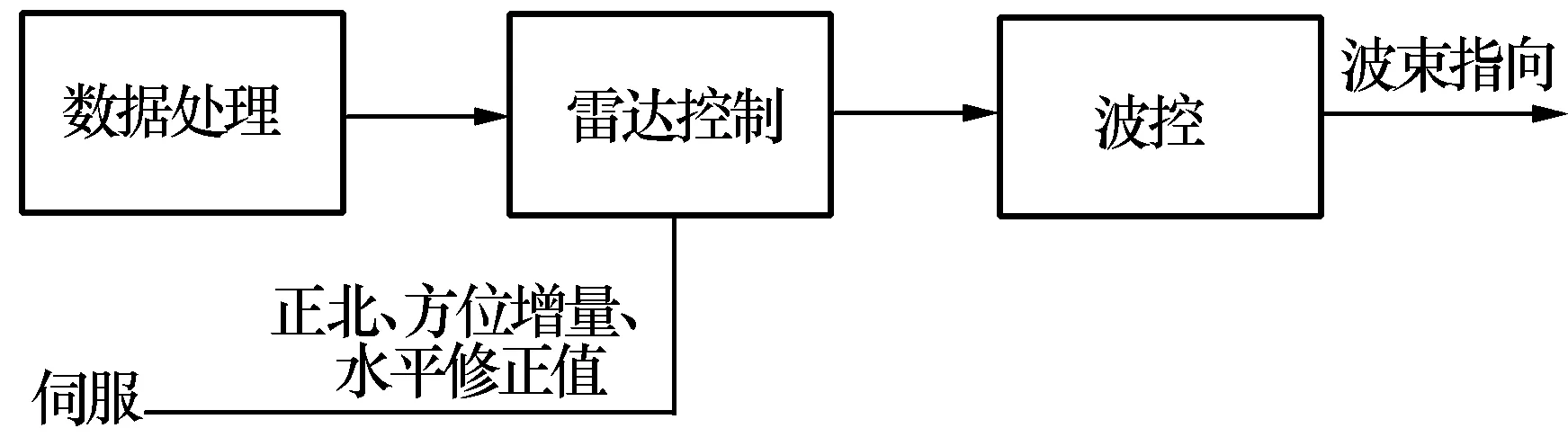
图1 重置波束指向实现框图
1.1 数据处理送波位信息
如图2所示,面对主天线阵面的正面,以左下角为坐标原点建立笛卡尔直角坐标系,阵面在XOY平面内,XOZ面为大地水平面。OT为波束指向。Az为波束指向OT在XOZ平面内的投影与OZ轴正向的夹角,逆时针为正(-90°≤Az≤90°)。El为波束指向OT与其在XOZ平面内的投影OT′之间的夹角,大地水平面上为正(-90°≤El≤90°)。
数据处理对雷达点迹信息分析,把下一波位驻留的波束指向信息Az雷达大地坐标、El雷达大地坐标送给雷达控制。
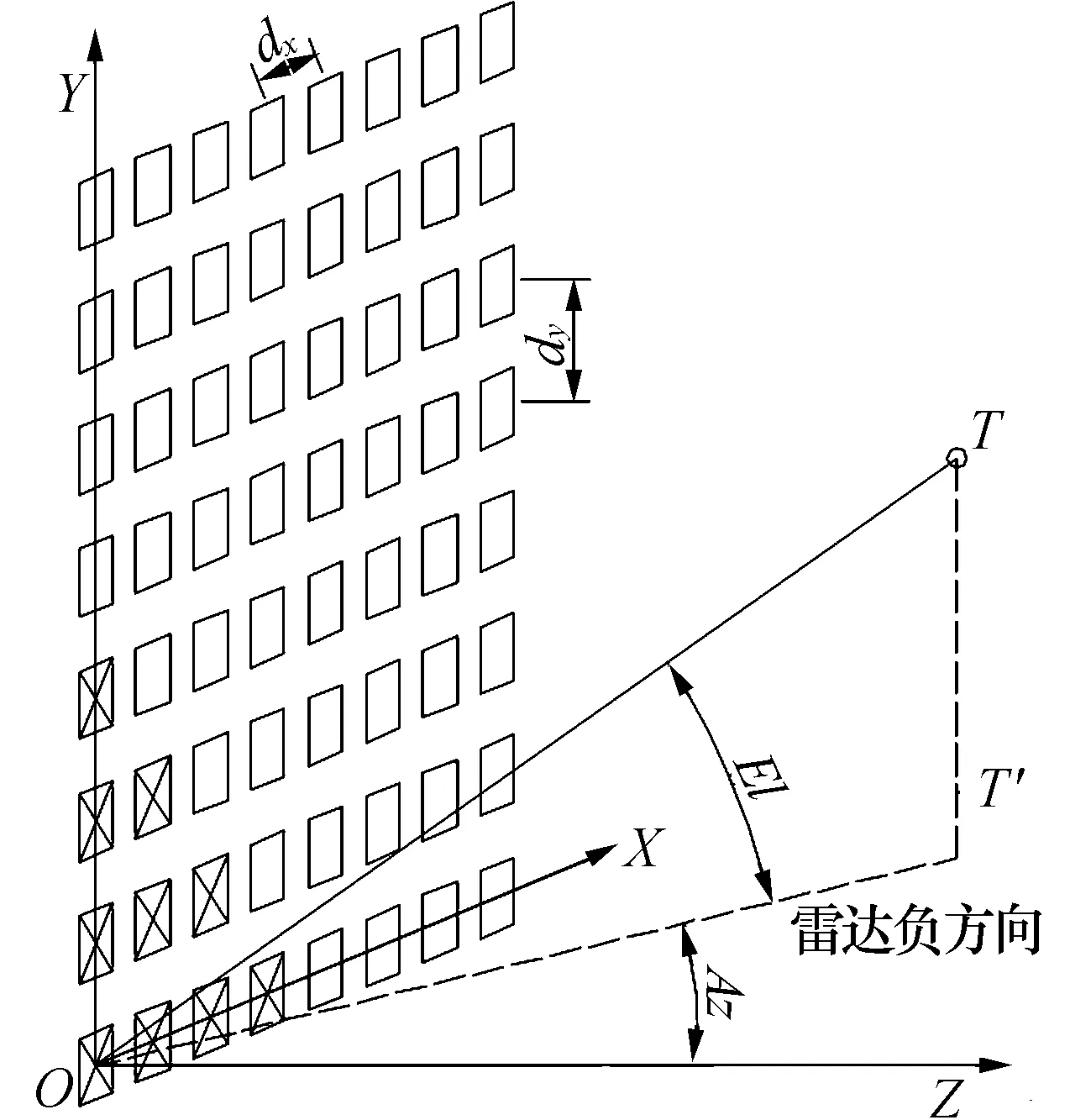
图2 天线阵面坐标示意图
1.2 雷达控制实时计算波束指向参数
雷达控制实时采集动态水平仪的水平修正值El水平偏差角,伺服的正北、方位增量,及数据处理送来的波束指向信息。计算出天线反面机械轴指向Az反面法向,如图3所示。
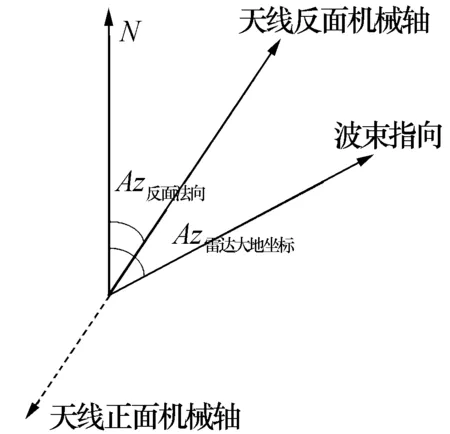
图3 天线反面机械轴指向
在图2中定义的Az、El与图3中雷达波束指向(在大地坐标系下)关系为:Az=Az雷达大地坐标-Az反面法向,El=El雷达大地坐标系-El水平偏差角。此时天线阵面工作在反面,对天线阵面反面一侧的目标进行探测。
若天线工作在正面,对天线阵面正面一侧的目标进行探测。Az=-(Az雷达大地坐标-Az反面法向-180°) 。
雷达控制计算出Az、El后,根据式(1)、式(2)计算波束指向参数α、β。
(1)
β(f,El,Az)= mod(1.2·f·dy)·
(2)
式中:f为工作频率点;dx为x轴向单元间距;dy为y轴向单元间距;Az为方位角;El为俯仰角;α为方位移相器相位增量(0°≤α<360°);β为俯仰移相器相位增量(0°≤β<360°)。
雷达控制将α(λ,θ,φ)、β(λ,θ,φ)按13位进行数字量化(四舍五入取整)送波控,即
(3)
式中:Δα为阵面单元移相器的方位波控增量码,13位量化,0≤Δα<8 192;Δβ为阵面单元移相器的仰角波控增量码,13位量化,0≤Δβ<8 192。
1.3 波控计算阵面单元波控码
波控接收到雷达控制的波束指向参数Δα、Δβ,计算出阵面中第(m,n)个单元的相移波控码为
(4)
式中:bxm,n为阵面单元的相位校正波控码(8位量化预存贮,对应0°~360°);zkm,n为展宽波束的单元相位波控码(8位量化预存贮,对应0°~360°);m为从坐标原点沿x轴正向对列编号(m=0,1,2,…,M-1);n为从坐标原点沿y轴正向对行编号(n=0,1,2,…,N-1);M为天线阵面列数;N为为天线阵面行数。
波控系统控制阵面单元移相器,形成和波束,在发射脉冲到来时,指向预定空域。
2 重置波束指向时序
传统的机相扫雷达重置波束指向的时序如图4a)所示,Mgs为帧起始信号,雷达控制在帧起始信号前300 μs(Mgs-300)采集阵面法向的角度值Az反面法向和动态水平仪的水平修正值El水平偏差角,用式(1)、~式(3),计算出波束指向参数Δα、Δβ,在帧起始信号前100 μs(Mgs-100)送给波控,波控算出每个单元的移相器值分别送到各个单元,在帧起始信号到来时,波束指向改变,指向预定的空间。通常雷达在一帧中会发射多个脉冲(M0),用的是同一个修正值,由于天线阵面水平方向机械转动,这样从第二个脉冲开始,就会影响波束扫描的精度。
本方法的重置波束指向时序图如图4b)所示,M0为发射起始信号,雷达控制在发射起始信号前300μs(M0-300)采集阵面法向的角度值Az反面法向和动态水平仪的水平修正值El水平偏差角,用式(1)~式(3),计算出波束指向参数Δα、Δβ,在发射起始信号前100 μs(M0-100)送给波控,波控算出每个单元的移相器值分别送到各个单元,在发射起始信号到来时,波束指向改变,指向预定的空间。由于这种控制流程,波束指向参数计算使用的当前阵面法向(Az反面法向)角度值(脉冲内),使波束扫描的精度有了很大的提高。
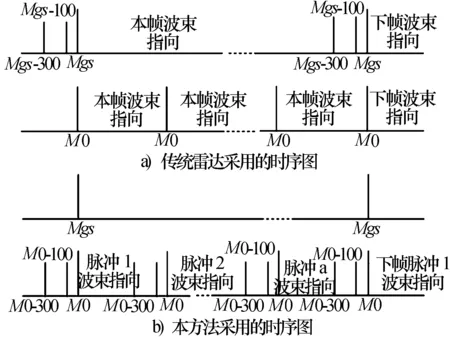
图4 重置波束指向时序图
3 精度影响分析
采用按脉冲(M0)重置波束指向参数,修正了方位机扫时按波位(帧)重置波束指向带来的波束指向的扫描偏差,减小了目标的脉间起伏,确保雷达威力,提高了测角精度。
精度影响分析如下:一种航管雷达天线方位波束宽度为1.3°,在雷达正常转速6 r/min情况下,转过3 dB波束宽度时间为36.1 ms。对于重复周期为3 ms的6脉冲波位驻留,驻留时间为18 ms,在此驻留时间内天线机械旋转角度为0.65°。该型雷达是采用多波位幅度加权测角[5],参见图5所示的3波位跟踪波位驻留示意图,这样在波位驻留时间内雷达回波会带来最大约6 dB的扫描调制,这对雷达威力会有2 dB~3 dB左右的损失,并且严重影响多波位幅度加权测角精度,造成不能对目标进行正常跟踪,这种情况在该雷达对民航目标的跟踪中已得到充分验证。
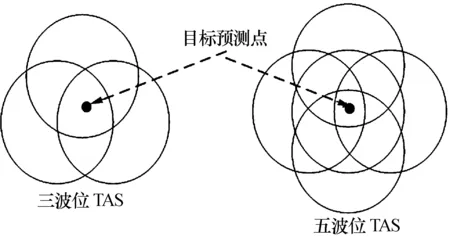
图5 目标TAS跟踪波位示意图
本方法通过机相扫雷达按脉冲重置波束指向,提高了波束扫描的精度,从而提高了雷达系统的测角精度与威力范围。表1为某型航管雷达检飞时,采用帧重置波束指向与脉冲重置波束指向的雷达精度与威力对比。
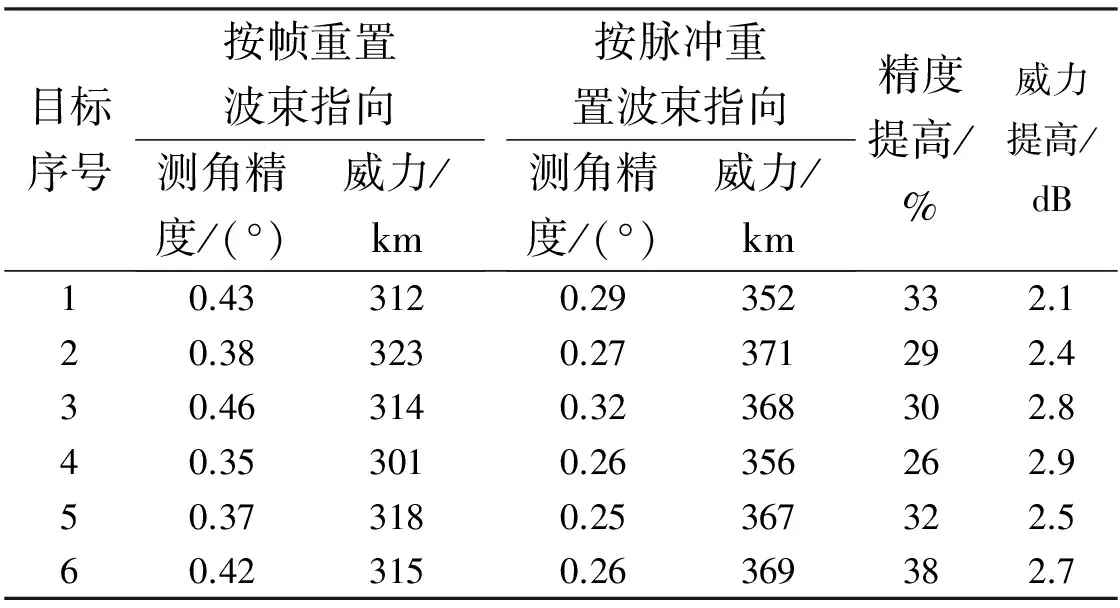
表1 精度威力对比
4 结束语
在机相扫雷达中,按发射脉冲(PRF)实时重置波束指向的方法,由于重置波束指向参数使用的当前阵面法向角度值和动态水平仪值,提高了机相扫雷达波束扫描的精度。本方法仅对重置波束指向时序作一定的调整,增加部分功能软件,不更改雷达控制硬件设计,实现成本低,适用于现役、在研的一维、两维机相扫雷达和其他动平台雷达。
[1] 吕栋雷,胡 浩. 雷达检测概率的计算[J]. 火力与指挥控制,2008,33(12): 144-146. LÜ Donglei, HU Hao. Computing of detection probability of radar[J]. Fire Control and Command Control, 2008,33(12): 144-146.
[2] 张 驿,王 辉,温 剑, 等. 摇摆状态一维相控阵天线波束指向修正[J]. 电讯技术,2011,51(6): 94-97. ZHANG Yi, WANG Hui, WEN Jian, et al. Beam pointing correction for linear phased array antenna in swing state[J]. Telecommunication Engineering, 2011, 51(6): 94-97.
[3] 郑 清. 相控阵雷达波控系统技术研究[J]. 现代雷达,2006,28(4):53-55. ZHENG Qing. A study on technology of phased array beam steering system[J]. Modern Radar, 2006, 28(4): 53-55.
[4] 林桂道. 现代相控阵系统的波束控制设计分析[J]. 船舶科学技术,2007,29(3):74-78. LIN Guidao. Design of beam steering in modern phased array system[J]. Ship Science and Technology, 2007, 29(3): 74-78.
[5] 张光义. 共形相控阵天线的应用与关键技术[J]. 中国电子科学院学报,2010, 5(4):331-336. ZHANG Guangyi. Applications and key technologies of conformal phased array antenna[J]. Journal of CAEIT, 2010,5(4):331-336.
张晓平 男,1959年生,高级工程师。研究方向为雷达系统控制、终端显示技术。
陆 健 男,1979年生,高级工程师。研究方向为雷达系统设计。
A Method of Improving the Accuracy of Beam-steering Based on Mechanical Phase Scan Radar
ZHANG Xiaoping,LU Jian, ZHU Jinmen
(Nanjing Reserach Institute of Electronics Technology, Nanjing 210039, China)
In the mechanical phase scan radar, the accuracy of the target's angle and ranging detection is not only determined by the beam-steering accuracy,and even affect success or failure of the tracking ang acquisiting targets. The way to realize the beam-steering is discussed in this paper. It is proposed that a method for calculating the parameters of the beam-steering in real-time by PRF. This method can improve the accuracy of beam-steering, improve the fluctuation of targets,and enhance the tracking accuracy and power of the radar system. This will be referenced by the design and application of the moving platform radar system.
mechanical phase scan radar; pulse repetition frequency; beam-steering; tracking and searching
10.16592/ j.cnki.1004-7859.2016.04.005
张晓平 Email:13605164656@139.com
2015-11-16
2016-01-26
TN820.1
A
1004-7859(2016)04-0022-03
