基于双向滑动平均的目标长度特征提取方法
2016-02-23舒占军李华琼周洪宇于雪莲
周 云,舒占军,李华琼,周洪宇,于雪莲
(1. 电子科技大学 电子工程学院, 成都 611731; 2. 中国民航局第二研究所, 成都 610041) (3. 南京电子技术研究所, 南京 210039)
·信号处理·
基于双向滑动平均的目标长度特征提取方法
周 云1,舒占军1,李华琼2,周洪宇3,于雪莲1
(1. 电子科技大学 电子工程学院, 成都 611731; 2. 中国民航局第二研究所, 成都 610041) (3. 南京电子技术研究所, 南京 210039)
基于高分辨距离像的雷达目标识别是该领域的研究热点,而特征提取是其中的关键环节。相对于散射中心强度和位置特征而言,长度特征随目标方位角变化的影响较小,是一种相对稳定的特征,而且长度特征属于目标本身的物理特征,具有实际的物理意义。文中提出一种基于双向滑动平均的目标长度特征提取方法,并将提取的长度特征用于目标粗分类。该方法首先对距离像进行降噪处理,然后从左右两端同时向中间进行滑动平均处理,当滑动均值大于预设的阈值时,即可确定目标区域的起始和终止位置,从而得到目标的长度特征。该方法的核心在于分别估计左右两端各自的阀值,而不是采用一个统一的阀值,并且在阀值估计的过程中同时考虑了距离像均值和噪声的影响。因此,该方法对于距离像突变、非目标区域野值等具有较强的稳健性。通过对五类飞机的实测数据进行实验,验证了该方法的有效性。
高分辨距离像;特征提取;目标长度;双向滑动平均
0 引 言
多年以来,基于高分辨距离像的雷达目标识别一直备受关注,而特征提取方法是研究的焦点所在[1-4]。高分辨距离像可以反映强散射中心在雷达照射方向上的投影分布情况,而这些强散射中心一般被认为与诸如机头、机翼、机尾等的目标的物理特征有关。因此,从高分辨距离像中提取强散射中心的位置和幅度信息作为特征用于分类是一种常用的做法。然而,无论是强散射中心的位置还是幅度特征,受目标方位角变化的影响都非常剧烈,从而大大影响了目标识别的性能[5-6]。
相比之下,目标长度特征随方位角的变化较缓慢,并且是目标本身的物理特征之一。因此,目标长度特征是一种稳定、有效的物理特征。仅仅利用目标长度特征可能无法得到良好的识别效率,但对于进行目标粗分类来说却非常有用[6-8]。
目标长度定义为目标在雷达照射方向上的投影长度,而估计目标长度的关键在于确定距离像中目标区域的起始和终止位置。通常采用阀值法进行处理,即在距离像中设置一个阀值,以超过阀值的部分作为目标区域,用来估计目标长度。文献[6]采用噪声电平乘以一个门限系数K作为阀值,噪声电平利用不包含目标回波的噪声区域估计得到,而门限系数K却难以确定。文献[7]以距离像的均值为参考首先确定一个阀值范围,然后以一定的步长进行搜索,并通过计算一定量的距离像在各阀值下投影长度的方差,最终确定一个最优的阀值。该方法需要搜索,运算量较大,且单幅距离像的阀值依赖于多幅距离像的方差,在实际应用中容易受限。
阀值法对噪声比较敏感,并且易受距离像的突变、非目标部分出现的“野值”等因素的影响。针对该问题,文献[8]提出了一种自适应差分算子法对距离像进行处理。文中实验结果表明,经过处理后的距离像变得平滑,受噪声影响大大减弱,从而使目标区域起始和终止位置的确定变得相对容易。但文中并没有给出确定目标区域起始和终止位置的具体方法。文献[9]提出了一种基于最优路径的目标长度提取方法,并验证了其在强噪声环境下的有效性。然而,该方法的有效性仅局限于圆锥形物体,并且文中实验是在暗室环境下针对弹道目标模型进行的,对实测数据的有效性还有待进一步验证。
针对以上问题,本文提出一种基于双向滑动平均的目标长度特征提取方法。该方法首先采用文献[8]的方法对距离像进行预处理;然后根据距离像的均值以及左右两端的噪声电平分别估计出左右两端的阀值;最后从左右两端同时向中间进行滑动平均处理,当左端滑动均值大于左端阈值时,即可确定目标区域的起始位置;同样地,当右端滑动均值大于右端阀值时,即可确定目标区域的终止位置,从而得到目标的长度特征。对五类飞机的实测数据进行实验,结果表明,该方法受距离像突变、野值等的影响较小,能准确找到目标区域的起始和终止位置,所提取的目标长度特征较稳定,可用于进行目标粗分类。
1 目标长度特征
图1为一幅实测的高分辨距离像,真实目标的回波只占中间一部分区域,即为目标区域,而两端则为噪声区域。估计目标长度的关键就是能否准确确定目标区域在距离像中的起始位置Pb和终止位置Pe。确定了起始和终止位置以后,目标长度特征便可由公式(1)计算得到
L=(Pb-Pe)×ΔR
(1)
式中:ΔR为雷达系统的距离分辨率。
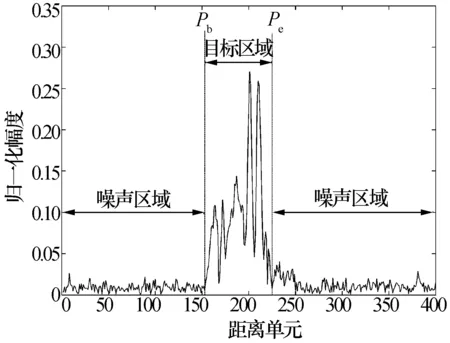
图1 实测距离像
2 目标长度特征提取
2.1 预处理
采用文献[8]提出的自适应差分算子法对测量到的高分辨距离像进行预处理。差分算子的定义如下
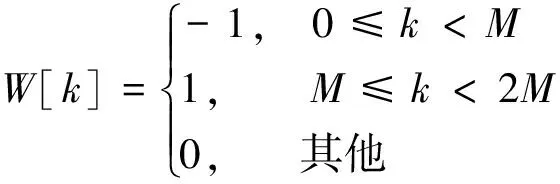
(2)
可知,式(2)中所定义的差分算法本质上就是一个宽度为2M、奇对称的窗。
设x=[x1,x2,…,xN]T是一幅高分辨距离像,将差分算子在距离上从左到右逐点滑动。每滑动一步,就对差分算子与落入窗内的距离像进行内积运算并取绝对值。该过程可表示为

i=1,2,…,N-2M+1
(3)
经过自适应差分处理后的距离像为
y=[y1,y2,…,yN-2M+1]T
(4)
对图1中的高分辨距离像进行上述的自适应差分处理,结果如图2所示。
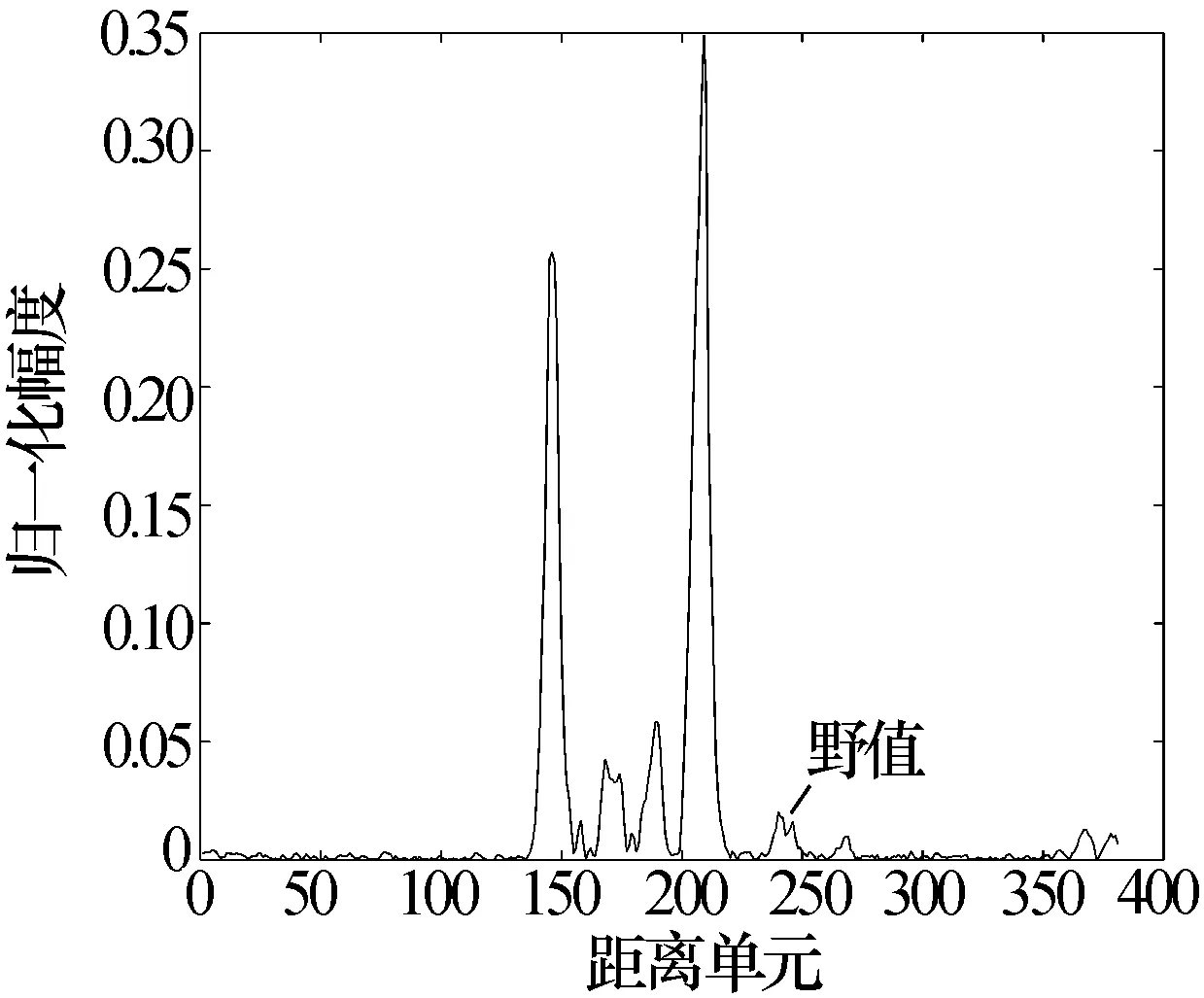
图2 预处理后的距离像
2.2 双向滑动平均法
由图2可知,预处理后的距离像变得光滑,噪声得到了较好的抑制。然而,一些非目标部分的野值并没有被很好地抑制掉,仍然会影响目标区域起始和终止位置的确定。为此,本文在确定阀值时,不仅将距离像的均值电平作为参考,而且考虑噪声部分的影响,并通过滑动平均的方法进一步减弱野值的影响。此外,起始位置和终止位置的确定采用各自不同的阀值,从左右两端同时向中间滑动,故为双向滑动平均法。
采用双向滑动平均方法估计目标长度的主要步骤如下:
1)采用自适应差分法对高分辨距离像进行预处理。
2)根据目标的真实长度,将预处理后的距离像粗略划分为中间的目标区域以及左右两端的噪声区域。
3)计算距离像的均值(meanHRRP)以及左右两端噪声区域的最大值(maxnoiseL,maxnoiseR),并按式(5)确定左右两端的阀值TL和TR
(5)
4)确定滑窗宽度m,从左右两端同时向中间进行滑动。
5)每滑动一步,分别计算落入两个滑窗内的数据的均值,记为AL和AR。将AL与TL比较,若AL>TL,则将当前左滑窗的位置记为起始点Tb,停止滑动;否则,继续向中间滑动。同理,将AR与TR比较,若AR>TR,则将当前右滑窗的位置记为终止点Te;否则,继续想中间滑动。重复该过程,直到Tb和Te均确定为止。
6)考虑到差分算子的宽度2M,目标长度的估计结果为
L=(Tb-Te-2M+1)×ΔR
(6)

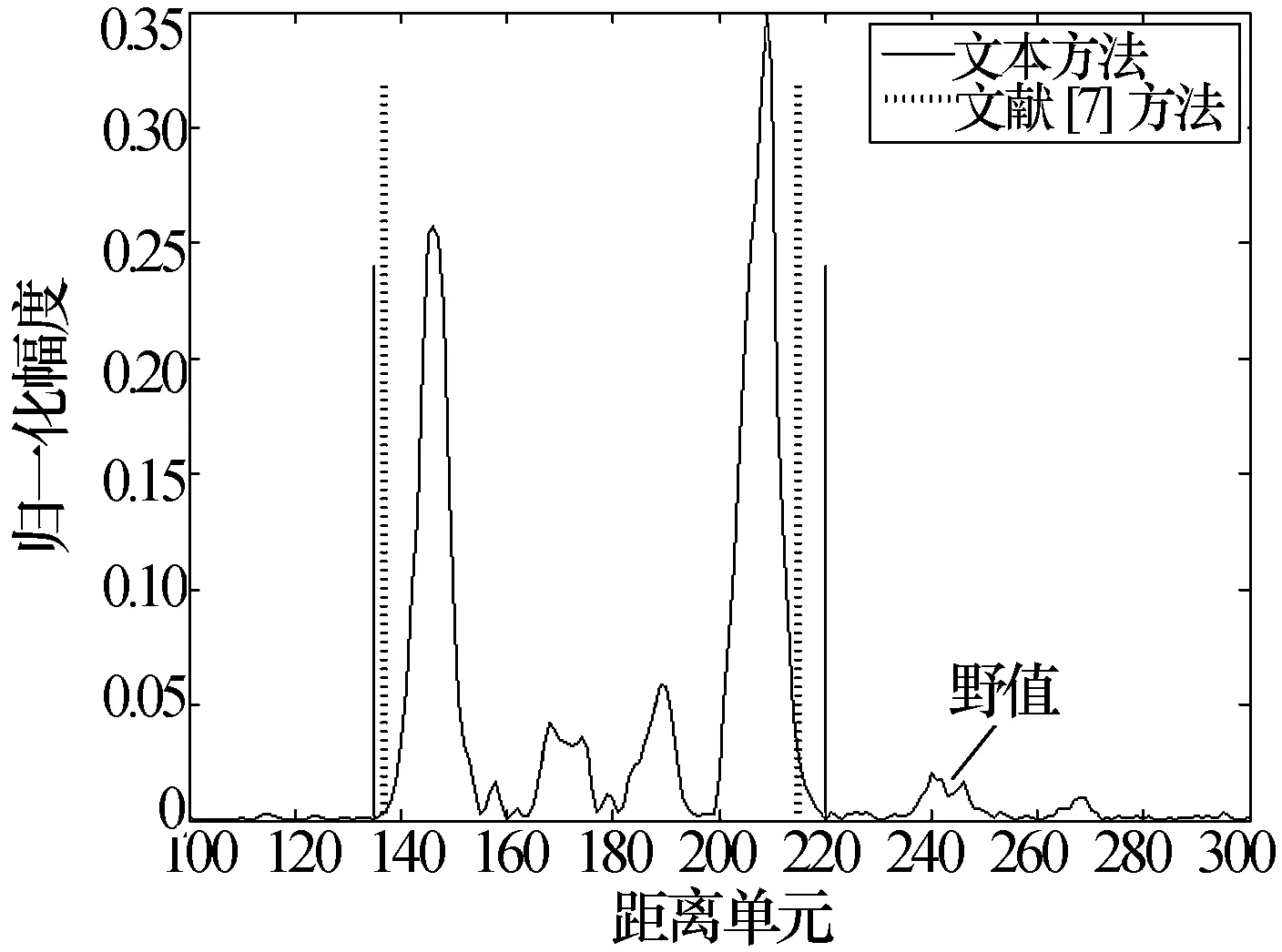
图3 目标区域起始和终止位置的确定
可以看到,采用文献[7]中的方法找到的目标区域起始位置和终止位置均向中间偏离,估计出的目标长度将明显小于真实值。其原因在于选取的阀值高于图中所标注的野值的电平。相比之下,本文的双向滑动平均法可以免受图中标注的野值的影响,准确地找到目标区域的起始和终止位置,从而能得到更精确的目标长度特征。
3 实验结果与分析
3.1 实验数据说明
本文实验所用数据来源于宽带雷达在外场对五类民航飞机(A319、A320、B737、B752、E145)所成的高分辨距离像。进行外场采集时,各类飞机均处于升空阶段,姿态角变化较为剧烈。雷达信号带宽为200 MHz,采样率为1 GHz。五类飞机的机长和翼展参数如表1所示[10]。

表1 五类飞机的机长和翼展参数 m
实测距离像的原始长度为1 000点,采用文献[10]的方法截取400点可满足对真实目标回波的完全覆盖。处理后,五类飞机的距离像如图4所示,实验中每类飞机的样本数量均为160。

图4 五类飞机的实测离像
3.2 长度特征提取结果及分析
采用本文的双向滑动平均法对上述五类飞机的实测距离像进行长度特征提取实验,结果如图5所示。本文实验中,双向滑动平均法的滑窗长度取值为4~8。由图5中的长度特征分布图可见,采用本文方法提取的长度特征较为稳定,可用于目标粗分类。
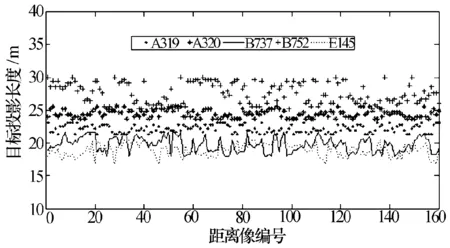
图5 采用双向滑动平均法提取的长度特征
对表1中五类飞机的实际物理尺寸进行分析可知:
1)飞机的投影长度与飞机实际的机长和翼展均有关,且随飞机方位角的变化缓慢变化。在0°方位角附近,投影长度主要由机长决定;在90°方位角附近,投影长度主要由翼展决定。
2)B752的机长和翼展比其他飞机的都要大很多,最容易区分出来;B752的翼展和A320的机长接近,只有当B752位于90°方位角附近,而A320位于0°方位角附近时,两者将难于区分。
3)A320的机长比B752小10m左右,比其他三类飞机至少大4m左右,单从机长来说,容易与其他三类飞机区分开来。但A320和A319的翼展长度非常相似,可以想到,如果这两类飞机的方位角都在90°附近时,它们的投影长度将非常接近,两类飞机将很难区分。
4)A319和B737的机长非常相近,如果两类飞机的方位角均在0°附近,将很难区分;但它们的翼展相差6 m左右,当方位角偏离0°,向90°靠近时,两类飞机投影长度的差别将越来越大,也将容易区分。
5)A319和E145的机长之间、翼展之间以及机长-翼展之间的尺寸均相差较大,所以根据投影长度,这两类飞机应该很容易区分。
6)B737和E145的机长之间和翼展之间均相差较大,但B737的翼展与E145的长接近,当B737位于90°方位角附近,而E145位于0°方位角附近时,二者将难于区分。
由图5可知,根据所提取的长度特征,可以较容易地将这五类飞机粗分为四类。B752、A320和A319之间很容易区分,B737和E145的长度特征曲线重叠较严重,在没有其他信息的条件下,无法区分。
3.3 基于长度特征的目标粗分类实验
将提取的每类飞机的目标长度特征分别按隔一取一和隔三取一的抽取方式获得训练样本集,剩余样本构成测试样本集。采用最小距离分类器进行分类,即:将每类飞机练样本集的均值作为模板,分类时,计算每个测试样本与每类飞机模板之间的欧式距离,距离最小的一类即为该测试样本的类别。粗分类的结果如表2和表3所示,表中分类结果以混淆矩阵的形式给出。
表2和表3中粗分类的结果进一步表明,根据目标长度特征进行分类,A319、A320和B752三类飞机都可以得到良好的识别效果,而B737和E145两类飞机容易混淆,识别效果不佳。该结果与图5中五类飞机长度特征的分布图完全吻合。
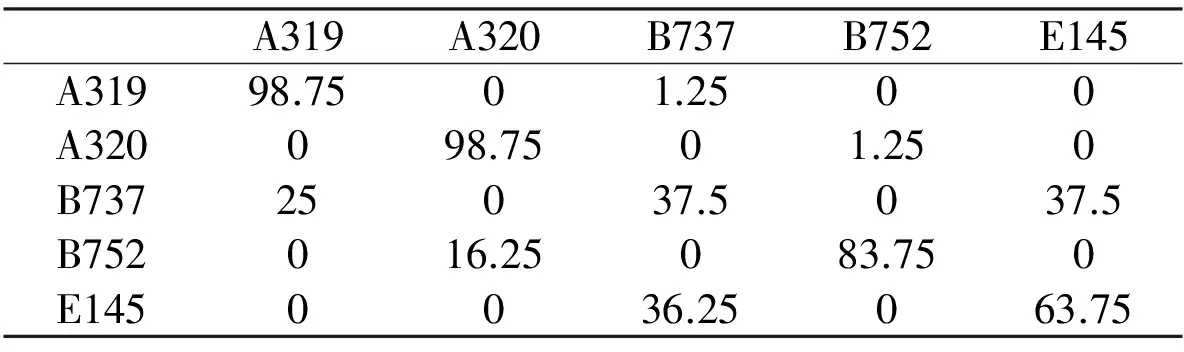
表2 粗分类结果(隔一取一) %
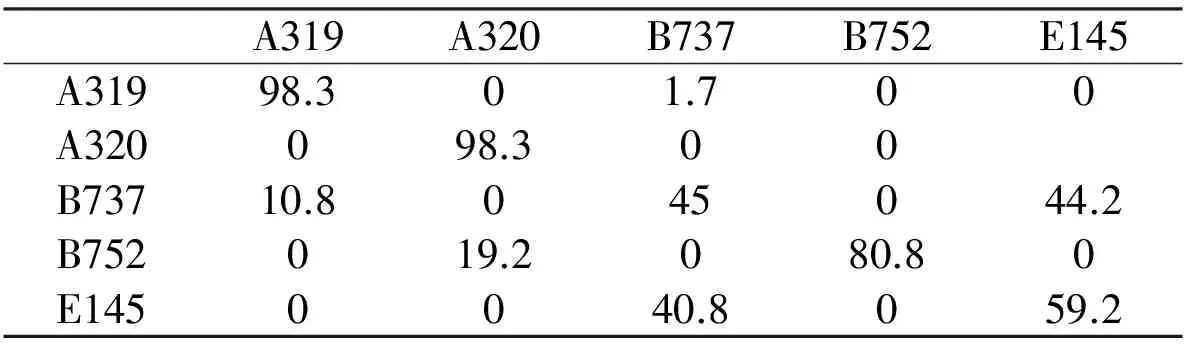
表3 粗分类结果(隔三取一) %
结合3.2节中的分析可以推断,在外场数据采集时,B737可能位于90°方位角附近,而E145位于0°方位角附近,从而使得两者的投影长度接近,难以区分。如果能得到所采集距离像的方位角信息,根据长度特征进行目标分类将变得更为容易。
4 结束语
本文提出一种双向滑动平均法从目标高分辨距离像中提取目标长度特征,该方法受距离像突变、野值等的影响较小,能准确找到目标区域的起始和终止位置,所提取的目标长度特征较稳定。对五类民航飞机的实测数据进行长度特征提取实验,并将提取的长度特征用于目标粗分类,取得了较好的效果。实验结果验证了本文所提方法的有效性,同时进一步验证了根据长度特征进行目标粗分类的可行性。
[1] JACOBS S P, SULLIVAN J A O. Automatic target recognition using sequences of high resolution radar profiles[J]. IEEE Transactions on AES, 2000, 36 (6): 364-380.
[2] 于雪莲,汪学刚,刘本永. 基于KLLE和KNR的雷达目标一维像识别[J]. 现代雷达, 2008, 30 (10): 39-42. YU Xuelian, WANG Xuegang, LIU Benyong. Radar target recognition using range profiled based on KLLE and KNR[J]. Modern Radar, 2008, 30(10): 39-40.
[3] BLACKNELL D, GRIFFITHS H. Radar automatic target recognition and non-cooperative target recognition[M]. London, UK: The Institute of Engineering and Technology, 2013: 78-80.
[4] 孙 俊,陈亚伟,李崇谊,等. 基于雷达宽窄带多特征信息融合的空中目标识别[J]. 现代雷达,2015, 37(7): 15-19. SUN Jun, CHEN Yawei, LI Chongyi, et al. Fusion recognition of air target based on DS evidence theory with wideband and narrowband characteristics[J]. Modern Radar, 2015, 37(7): 15-19.
[5] DOO S H, SMITH G, BAKER C. Reliable target feature extraction and classification using potential target information[C]// Radar Conference. Arlington, VA: IEEE Press, 2015: 628-633.
[6] XU Xiaotian, WEN Tieniu. Research on air target classification based on extraction of physical features of high-resolution radar range profiles[C]// IEEE CIE International Conference on Radar. Chengdu: IEEE Press, 2011: 1668-1671.
[7] 王 涛, 李士国, 王秀春. 一种基于高分辨距离像的目标长度特征提取算法[J]. 中国电子科学研究院学报, 2006, 1(6): 532-535. WANG Tao, LI Shiguo, WANG Xiuchun. Extraction of target length using high resolution range profiles[J]. Journal of CAEIT, 2006,1(6): 532-535.
[8] LIAO Kuo, YANG Wanlin. Extraction of radar target length based on high resolution range profile[C]// International Conference on Electrical and Control Engineering. Wuhan: IEEE Press, 2010: 956-959.
[9] NING C, HUANG J, GAO C, et al. A new method for estimating radar profile length of a cone target[C]// IEEE International Conference on Green Computing and Communications. [S.l.]: IEEE Press, 2013: 1561-1565.
[10] 廖 阔. 基于高分辨距离像的雷达自动目标识别研究[D]. 成都:电子科技大学,2006. LIAO Kuo. Automatic target recognition based on high resolution radar profiles[D]. Chengdu :University of Electronic Science and Technology of China, 2006.
周 云 男,1977年生,副教授。研究方向为雷达信号处理、雷达目标识别。
舒占军 男,1990年生,硕士研究生。研究方向为雷达目标识别与跟踪。
李华琼 女,1963年生,高级工程师。研究方向为目标识别、空中交通信息系统与控制。
周洪宇 女,1973年生,高级工程师。研究方向为电子对抗总体工程。
于雪莲 女,1980年生,副教授。研究方向为雷达目标识别、检测与跟踪。
A Method of Radar Target Length Feature Extraction Based on Two-way Sliding Average
ZHOU Yun1,SHU Zhanjun1,LI Huaqiong2, ZHOU Hongyu3,YU Xuelian1
(1. School of Electronic Engineering, University of Electronic Science and Technology, Chendu 611731, China) (2. The Second Research Institute of CAAC, Chengdu 610041, China) (3. Nanjing Research Institute of Electronics Technology, Nanjing 210039, China)
Radar automatic target recognition based on high range resolution profile (HRRP) has been subject to intense research and feature extraction is a critically important process. Generally, a number of dominant scatterers are selected from a HRRP and their intensities and locations are used as a target feature. However, both intensity and location are in fast variation with the changes of the target aspect angle and this degrades the classification performance. By contrast, the target length, as an inherent physical feature of target, varies relatively slowly with the aspect angle, thus providing a promising feature for rough classification purpose. In this paper, a two-way sliding average method is proposed to extract the target length feature from a HRRP. The HRRP is firstly pre-processed by using a de-noising method, and then the sliding average method is conducted on the pre-processed HRRP from the left and right side simultaneously. The beginning or ending position of target area is determined and the target length is obtained when the sliding mean goes over the preset threshold. The core of our method lies in that two individual thresholds are estimated for the left and right side respectively rather than one single. Moreover, by taking both the mean of the HRRP and noises into consideration, the method is relatively robust to abrupt changes in the HRRP or outliers in non-target area. Experimental results based on measured data from five airplanes show the effectiveness of the proposed method.
high range resolution profile; feature extraction; target length feature; two-way sliding average
10.16592/ j.cnki.1004-7859.2016.04.006
中国博士后科学基金(2014T70858)
于雪莲 Email:xlyu2012@uestc.edu.cn
2015-11-02
2016-01-26
TN911.7
A
1004-7859(2016)04-0025-05
