EDMA3在LiDAR点云实时处理中的应用
2016-02-13刘超李传荣胡坚贺文静牛京玉孟凡荣
刘超李传荣胡坚贺文静牛京玉孟凡荣
(1 中国科学院光电研究院 中国科学院定量遥感信息技术重点实验室,北京 100094)(2 中国科学院大学,北京 100049)
EDMA3在LiDAR点云实时处理中的应用
刘超1,2李传荣1胡坚1贺文静1牛京玉1,2孟凡荣1
(1 中国科学院光电研究院 中国科学院定量遥感信息技术重点实验室,北京 100094)(2 中国科学院大学,北京 100049)
针对激光雷达(Light Detection and Ranging,LiDAR)点云解算在轨/机载/车载处理中数据量大、实时性要求较高的需求,需要将LiDAR数据存储在处理速度较快的内部存储器中进行点云解算以提高处理速度。为了解决通常LiDAR数据量较大,内部存储器存储空间相对较小的问题,利用处理速度快的内部存储器和存储空间大的外部存储器建立数据缓存机制,用增强型直接内存访问(the Third Generation Enhanced Direct Memory Access,EDMA3)的乒乓缓存技术将LiDAR数据从外部存储器传输到内部存储器中以提高传输速率,并在内部存储器中开辟两个缓存区轮流接收LiDAR数据,以减少传输等待时间。传输LiDAR数据时是分块进行传输的,考虑到LiDAR数据的存储格式,将其按行分块,在DSP开发板上对不同分块大小的LiDAR数据分别进行了EDMA3乒乓读写方式和DSP的CPU读写方式的传输测试。将两种读写方式的数据传输性能进行了对比,验证了EDMA3的应用能够提高LiDAR数据传输速率,并对如何确定合理的数据分块大小,使EDMA3乒乓读写方式传输LiDAR数据的效率更高进行了探讨,对实时实现点云解算有一定的参考意义。
点云解算 数字信号处理器 第三代增强型直接内存访问 乒乓存取
0 引言
激光雷达(LiDAR)技术是一种新兴的对地观测技术,能够快速获取高精度数字地表模型,具有速度快、高程精度高、信息丰富等特点[1],广泛应用于国土资源调查、城市三维建模、公路建设、电网工程、灾害评估及古迹保护等方面[2]。但它采集的原始回波数据需要通过一系列处理(点云解算),才能生成满足应用需求的三维点云。
点云具有高精度的三维坐标信息和反射强度信息,具有离散性、数据量很大的特点。有些航天航空对地观测应用,如应急救灾、战场环境侦查以及车载即时定位与地图构建(Simultaneous Localization and Mapping,SLAM)应用[2]等,对获取三维场景的实时性有较高的要求,巨大的数据量与实时处理的运算量会给点云解算中数据的存储和处理带来巨大的挑战[3],从而对LiDAR数据实时处理平台的性能提出了更高的要求。
DSP、GPU或FPGA等器件常常被用于构建实时遥感数据处理平台中的数据实时处理单元。在LiDAR载荷采集的原始回波数据生成三维点云数据过程中,需要经过时间测量值到距离值的转换、基于联合成像时姿态位置数据的坐标转换以及误差校正等处理步骤,涉及到了大量的浮点运算以及相关回波信号质量判断等逻辑处理。在实际的实时数据处理平台构建中,由于DSP具有兼容定点运算和浮点运算、通信效率高、功耗低、并行性能好等特点,能够实现复杂算法与逻辑运算,因此,通常选择DSP来实现点云实时解算功能。
由于LiDAR数据是实时获取的,不仅数据量大,并且需要对其进行实时处理,因此对数字信号处理器(DSP)存储器的存储空间的利用和算法处理速度都有较高的要求。DSP的内部存储器和外部存储器在速度上和存储空间上存在差别:内部存储器I/O速度较快但是空间较小;外部存储器相对而言I/O速度较慢但存储空间可以设计得比较大。目前常用的TI、ADI公司的DSP都设计了专用的数据传输模块—第三代增强型直接内存访问(the Third Generation Enhanced Direct Memory Access,EDMA3),可以在DSP缓存与外设之间进行高效的数据传输,既解决了存储空间的问题,也能兼顾数据在DSP与外部存储器之间的I/O速度。EDMA3技术已经在实时图像处理、实时视频处理中得到了应用[4-5],将其用于激光雷达点云解算,可以借助EDMA3在数据传输方面的强大功能,提高点云解算中数据的传输效率,以达到实时实现点云解算的应用需求。
本文设计了一种在LiDAR数据实时处理过程中的基于EDMA3乒乓存取的LiDAR数据传输方式,并在DSP开发板上验证了EDMA3乒乓存取方式的速率优势,通过对比不同数据分块大小对LiDAR数据传输耗时的影响,对如何确定合理的数据分块大小使EDMA3乒乓读写方式传输LiDAR数据的效率更高进行了分析,对实时实现点云解算有一定的参考意义。
1 EDMA3传输原理
EDMA3是DSP的一种高效数据传输模块,在进行数据传输时,EDMA3能够做到几乎不占用DSP的CPU时钟周期[6]。
EDMA3主要包括通道控制器(EDMA3 Channel Controller,EDMA3CC)和传输控制器(EDMA3 Transfer Controller,EDMA3TC)两部分[7]。EDMA3CC是EDMA3控制器与用户之间的接口,包括参数存储器(Parameter RAM,PaRAM)、通道控制类寄存器及中断控制寄存器,对收到的请求或事件按优先级进行排序并向EDMA3TC提交传输请求。EDMA3TC负责控制数据的传输并分别向源地址和目的地址发出读/写命令。
EDMA3CC支持数组(Array)、数据帧(Frame)和数据块(Block)三个维度上的数据传输[8]。EDMA3CC支持两种传输方式:A同步传输方式和AB同步传输方式。每次事件触发时,A同步传输方式只能进行一个维度上的传输,AB同步传输方式可以进行两个维度上的传输。A同步传输方式可以用于进行数组的传输,AB同步传输方式则用于进行数据帧的传输。具体使用哪种传输方式需要根据源地址和目的地址中的数据存储形式以及每次触发需要传输的数据量的情况来确定。如果一次触发需要EDMA3完成多个数据块的传输,这种情况下就只能用AB同步传输方式;如果一次触发只要需要传输一个数据块,这时候用A同步传输方式就可以了。A同步传输方式相对AB同步传输方式更简单,在两种同步传输方式都适用的情况下,一般选择A同步传输方式。本文采用的是A同步传输方式。
通道控制类寄存器用于通道及中断寄存器的设置,包含全局寄存器、中断寄存器以及其他的寄存器等。其中,全局寄存器可用于通道的配置与映射等,全局寄存器中的DMA通道映射寄存器(DMA Channel Map n Registers,DCHMAP n)用于将参数集(PaRAM Set)与通道相映射;中断寄存器用于中断使能,中断寄存器中的中断使能寄存器(Interrupt Enable Registers,IER/IERH)用于在EDMA3传输中使能中断,中断查询寄存器(Interrupt Pending Register,IPR/IPRH)用于传输完成后相应标志位的置位,事件置位寄存器(Event Set Registers,ESR/ESRH)用于实现手动触发EDMA3传输的功能。
PaRAM中存放着512组传输控制参数(PaRAM Set),用于为EDMA3传输提供源地址、目的地址、地址增加量、传输的数据量和传输方式等参数[9]。PaRAM Set的结构如图1所示[9],
其中,OPT字段用于设定EDMA3的传输方式(A同步/AB同步)、传输完成中断产生方式(正常/提前)、传输完成链接方式和TCC(传输完成后,IPR/IPRH寄存器中与TCC对应的标志位置位)等;SRC和DST是源地址和目的地址;ACNT、BCNT和CCNT用于对传输次数进行计数;SRCBIDX、DSTBIDX、SRCCIDX、DSTCIDX用于设定地址增加量;LINK用于存储另一组PaRAM set实现参数链接。
加载参数后,EDMA3还需要触发才能实现传输功能。触发方式有三种:
1)事件触发:外设、系统、外部事件产生的传输请求;
2)手动触发:DSP的CPU向相应的ESR/ESRH中写1(置位)来触发传输;
3)链接触发:一次传输完成后可以触发下一次的传输。
EDMA3单次数据传输流程如下[10]:
1) EDMA3通道初始化:通过通道号和PaRAM Set的组号选择用于EDMA3传输的通道和PaRAM Set,并通过DCHMAP寄存器将它们映射在一起;
2)配置PaRAM Set:通过相应字段对源地址、目的地址、传输方式等进行设定;
3)配置IER/IERH寄存器参数:向IER/IERH寄存器相应位写1(置位),使IPR/IPRH的对应位在传输完成后置位;

图1 参数集结构Fig.1 Structure of PaRAM set
4)触发EDMA3传输:按照选择的触发方式触发EDMA3传输;
5)等待传输完成:通过查询IPR/IPRH寄存器相应位置的标志位,确定EDMA3传输完成。
从传输过程来看,当传输的数据用于运算处理时,由于EDMA3传输的速度很快,而DSP的CPU对这些数据的运算处理相对较慢,EDMA3在传输完数据后必须等待数据处理完成,才能继续传输,这就降低了处理效率。解决方法是利用EDMA3的链接功能加载多组PaRAM Set实现EDMA3的乒乓传输,在目的存储器中设置两个缓存区,轮流向这两个缓存区中传输数据,以减少等待时间,提高处理效率。
EDMA3 Ping-pong传输的实现过程是[11]:
1) EDMA3通道初始化:通过通道号和PaRAM Set的组号选择用于EDMA3传输的通道和三组PaRAM Set,并通过DCHMAP寄存器将EDMA3通道与第一组PaRAM Set映射在一起;
2)配置PaRAM Set:通过相应字段对源地址、目的地址、传输方式等进行设定,将第一组与第三组PaRAM Set中的参数设置成相同,第二组PaRAM Set中的参数设置成与上述两组不同,在第一组与第三组PaRAM Set中的链接地址(Link Address,LINK)字段中存储第二组PaRAM Set的地址,第二组PaRAM Set中的LINK字段中存储第三组PaRAM Set的地址;
3)配置IER/IERH寄存器参数:向IER/IERH寄存器相应位写1(置位),使IPR/IPRH的对应位在传输完成后置位;
4)触发EDMA3传输:首先加载与EDMA3通道映射的PaRAM Set,之后的触发按照LINK的指向分别加载其他两组PaRAM Set;
5)等待传输完成:查询IPR/IPRH寄存器相应位是否置位,确定Ping或者Pong传输完成,对数据进行相应的运算处理。EDMA3轮流向两个缓存区传输数据直到完成所有数据的处理。
EDMA3的Ping-pong传输在处理数据的同时通过触发EDMA3传输,实现了数据处理与数据传输的同时进行,减少了等待时间,提高了效率。
2 基于EDMA3的LiDAR数据处理流程设计
点云解算需要结合激光雷达采集的原始回波数据、激光脉冲测量时的姿态信息、位置信息以及扫描角参数等进行运算,求出每个激光脚点精确的三维空间坐标,完成相应回波数据的三维点云解算。上述数据分别从LiDAR数据和POS数据中读取,此外还需要读取LiDAR配置参数,因此,三维点云的解算过程涉及到对LiDAR数据、LiDAR配置参数和POS数据的传输和运算,且在实时处理过程中需要源源不断地接收载荷实时获取的回波数据并输入到DSP中进行运算处理。为了满足这一实时处理要求,需要尽可能地提高数据传输速率来减少数据I/O的时间。可利用DSP处理速度快的内部存储器和存储空间大的外部存储器建立数据缓存机制,将LiDAR载荷实时获取的数据流按照分段大小分批缓存到存储空间较大的外部存储器中,并在DSP中用于数据运算处理的内部存储器中开辟两个缓存区,将外部存储器中的LiDAR数据基于EDMA3技术传输到DSP内部来进行点云解算。
为了实现数据的有效接收与高效处理,在点云解算处理中,一般情况下源源不断的LiDAR原始数据(回波数据、姿态数据等)被分时逐段缓存到外部存储器DDR3(第三代Dual Data Rate SDRAM存储器)中,由EDMA3将获取的LiDAR分块数据高效地读入到内部存储器中进行处理。LiDAR数据的分块须依据LiDAR载荷的数据存储格式和处理程序进行优化。在传输与处理过程中,LiDAR数据一般是以数组的格式按数据获取时的扫描行存储与处理的。因此,在分块时可以将数据块的大小设定为数据行数据量的整数倍。
LiDAR数据的传输可以通过两种途径实现:一种是利用DSP的CPU直接读写数据,这种方法设计简单,读写速度取决于CPU主频;一种是利用EDMA3实现,使数据传输与CPU处理同步开展,减少数据传输耗时。
为了验证将EDMA3技术用于LiDAR数据传输以提高运行效率的可行性,设计了用EDMA3乒乓读写和DSP的CPU读写两种方式传输LiDAR数据的对比实验。
2.1 利用DSP的CPU进行数据读写
用DSP的CPU直接读写方式传输数据时,在完成一块数据传输后,CPU会对这些数据进行运算处理,等待对这些数据的运算处理完成之后,再进行下次传输,直至完成所有数据的传输与运算处理。
在性能测试过程中,对传输全部数据的耗时、运算处理所有数据的耗时以及传输与运算处理两个过程的总耗时进行了统计。CPU读写方式处理过程流程图如下:
2.2 利用EDMA3进行数据乒乓读写
用EDMA3乒乓读写方式进行数据传输时,需要在DSP的内部存储空间中开辟两个缓存区A和B,用于轮流接收数据和处理数据。完成EDMA3初始化之后触发EDMA3进行数据传输。EDMA3先向缓存区A传输数据,然后继续向缓存区B传输数据,同时DSP的CPU会对缓存区A中数据进行运算处理。等待缓存区A中数据的运算处理过程和缓存区B中数据的传输过程完成之后,继续向缓存区A中传输数据,同时对缓存区B中的数据进行运算处理,进入下一轮循环,直至完成所有数据的传输与运算处理[9]。
在之后的性能测试过程中,同样统计了传输全部数据的耗时、运算处理所有数据的耗时以及传输与运算处理两个过程的总耗时。EDMA3乒乓读写方式处理过程流程图如图3所示。
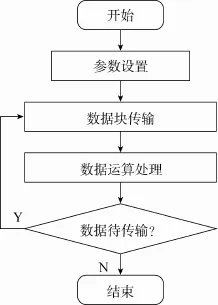
图2 CPU读写方式处理过程流程Fig.2 Flow chart of processing by the method of CPU direct writing and reading
3 试验结果与分析
实验选用的DSP型号是TMS320C6678,有8个核,单核频率可达1.25GHz。C6678的每个核都有自己的内部存储器L1P(Level-1 Program Memory)、L1D(Level-1 Data Memory)和LL2(Local Level-2 Memory),所有核共享1024K的MSM SRAM寄存器,并且最多可以扩展2Gbyte的外部DDR3寄存器[10]。实验选用的DSP开发板型号是TMDXEVM6678L EVM[11]。
考虑到处理速度较快的LL2的存储空间有限并且要建立两个缓存区,因此,用于测试的数据量不能太大。测试时,LiDAR数据选取的是某载荷航空飞行时所获取的一段连续的200行数据,每行208byte,数据量一共是41 600byte。POS数据也选取了对应的200行,每行52byte,共10 400byte。由于是为了测试DSP的EDMA3传输性能,因此测试开始前,将LiDAR数据全部存储在外部缓存DDR3中,而不需要像实际在轨/机载/车载LiDAR实时数据处理过程中那样将数据流乒乓放入到外部缓存区,这样一方面能减少测试的复杂性,同时也排除了外部缓存区的输入数据接收性能对于本次测试的影响。在DSP的LL2中建立两个缓存区。数据处理过程中分别用EDMA3读写的方式或直接用DSP的CPU读写方式按照数据分块大小将LiDAR数据传输到LL2的两个缓存区中。
在开发板上对用这两种方式传输LiDAR数据的情况分别进行了多次实验。每次传输数据块的大小是在考虑DSP的LL2容量的基础上,参照每次传输LiDAR数据的行数进行设置的,分块大小均为行数的整数倍,分别为1行、2行、5行、10行和20行,对应数据量大小为208byte、416byte、1 040byte、2 080byte和4 160byte。实验中将各次统计的数据传输消耗的时间、数据运算处理消耗的时间以及整个传输与运算处理过程消耗的总处理时间分别求和取平均值作为最终统计结果。
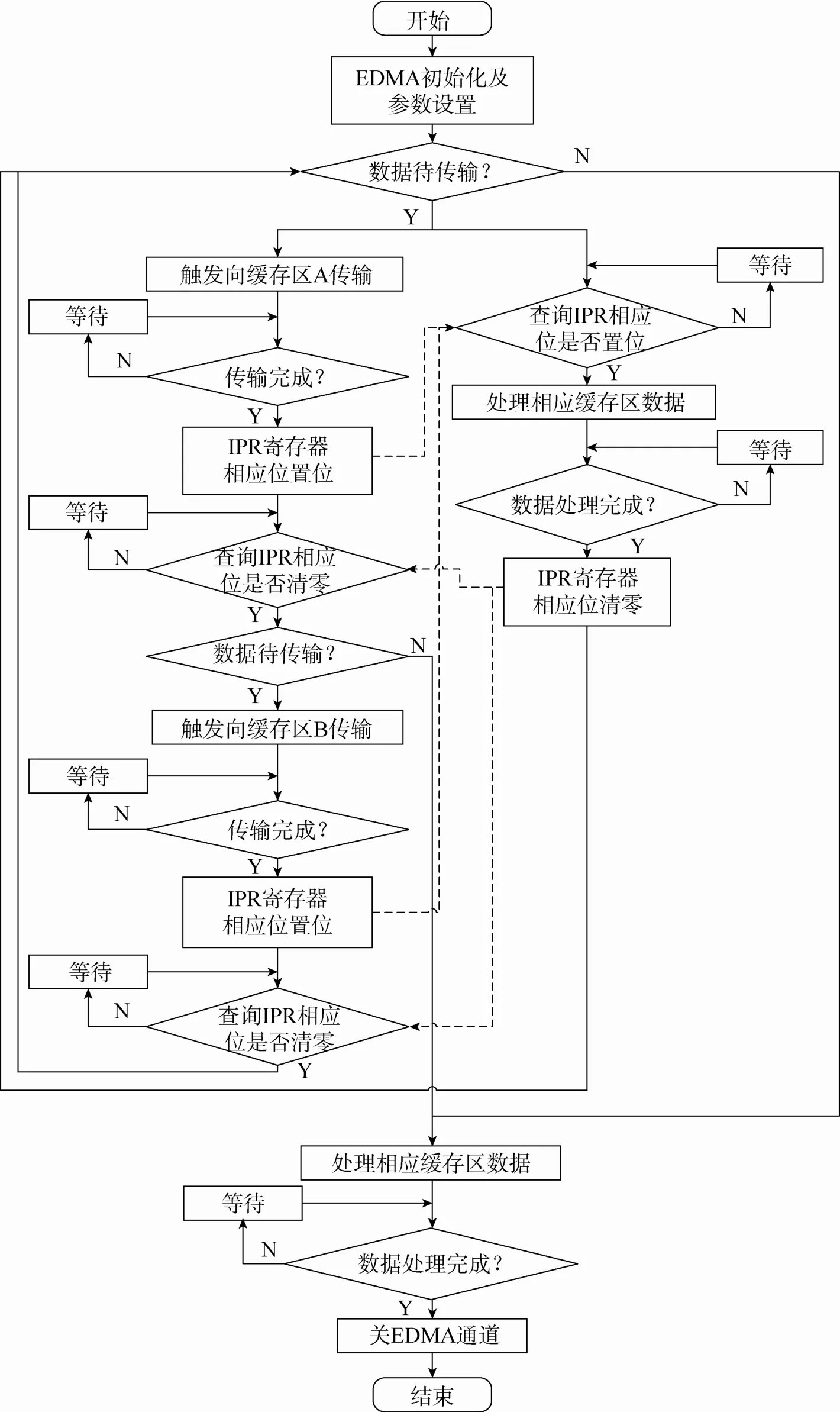
图3 EDMA3乒乓读写方式处理过程流程Fig.3 Flow chart of processing by the method of ping-pong buffering based on EDMA3
完成测试后,将两种读写方式传输LiDAR数据的性能进行了对比,然后分析了EDMA3乒乓读写方式传输LiDAR数据时数据分块大小对总处理时间的影响。
3.1 两种读写方式性能对比
两种读写方式按照不同数据分块大小完成41 600byte LiDAR数据传输的耗时及整个传输与运算处理过程消耗的总处理时间统计如表1所示:
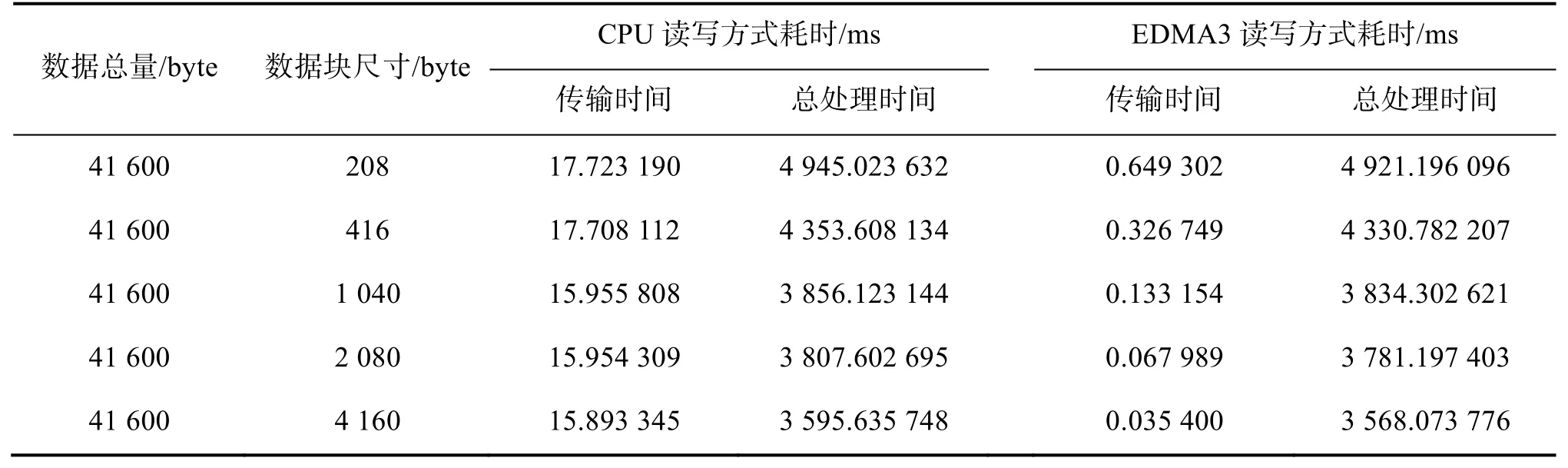
表1 两种读写方式数据传输时间及总处理时间统计Tab.1 Data transmission time and the whole processing time by two methods

图4 单次处理时间随数据分块大小变化统计Fig.4 Change trend of the single processing time
从表中可以看出,当传输数据块的大小相同时,EDMA3乒乓读写方式消耗的时间远比DSP的CPU读写方式要短,验证了EDMA3在数据传输速率方面有较大的优势。
数据的总处理时间包括数据的传输时间和数据的运算处理时间两部分。对采用两种读写方式传输的数据进行运算处理的过程是相同的,因此,两种读写方式下的运算处理消耗的时间基本相同。由于EDMA3读写方式传输数据耗时较短,因此总处理时间也相对较短。由此可见,用EDMA3乒乓读写方式能提高LiDAR数据处理效率。
3.2 数据分块大小对EDMA3乒乓读写方式总处理时间的影响
从表1可以看出用EDMA3乒乓读写方式传输LiDAR数据时,数据分块大小对总处理时间的影响是:随着数据分块增大,总处理时间呈减小趋势。
分别对不同数据分块大小情况下数据的传输和数据的运算处理两个过程消耗时间的变化情况进行分析。
对两种读写方式进行数据传输消耗时间的情况(如表1所示)进行分析,当数据量一定时,分块越小,每次传输的数据量减少,传输次数相应增加。EDMA3每次传输时都要进行的通道触发,参数加载以及寄存器清零等步骤需要消耗时间,因此传输次数越多,附加的时间消耗也会越多,从而造成传输时间的增加。因此,随着数据分块增大,传输全部数据消耗的时间呈减少趋势,并且减少的趋势越来越平缓。
不同分块大小的数据块所需运算处理消耗的时间如图4所示。
从图中看出,分块越大,数据运算处理消耗时间也越多。对数据进行分析,当分块大小为208byte时,对208byte数据运算处理消耗时间是24.6ms;分块大小为4 160byte时,对4 160byte数据运算处理消耗时间是356.8ms。两种情况下,数据块大小是20倍关系,消耗的时间大约是14.5(356.8/24.6)倍关系。因此,数据分块越大,对全部数据的运算处理消耗的总时间越少。
综上,结合数据传输时间和数据运算处理时间随数据分块大小的变化情况,可以看出,随着数据分块增大,总处理时间有减小的趋势。
尽管如此,在确定合理的数据分块大小以提高运行效率时,还应该考虑到DSP内部存储器LL2的存储空间限制:除了两个缓存区,程序运行过程中用到的变量的存储以及数据缓存等均在LL2中,需要占用存储空间。因此,需要 对LiDAR数据的格式以及输入速率、DSP的点云处理任务、LL2的存储空间的大小和缓冲区的数目以及LiDAR点云解算后续处理等方面进行综合考虑,以确定合适的EDMA3数据传输过程中数据块的大小,以实现更高效的点云数据处理能力。
4 结束语
本文将EDMA3乒乓读写方式用于LiDAR数据的传输,对某载荷航空飞行时所获取的数据进行了传输性能测试。测试的结果表明基于EDMA3乒乓读写方式的应用能够提高LiDAR数据传输速率。另外探讨了数据分块大小对EDMA3乒乓读写方式传输LiDAR数据消耗的总处理时间的影响。论文工作对基于EDMA3乒乓技术实现在轨/机载/车载激光雷达点云数据实时处理有一定的借鉴。
References)
[1] 黎荆梅, 周梅, 李传荣. 阵列推扫式机载激光雷达三维点云解算方法研究[J]. 遥感技术与应用, 2013, 28(6): 1033-1038. LI Jingmei, ZHOU Mei, LI Chuanrong. Research on Points Position Cloud Calculation Method of Airborne Linear Array Push-broom LiDAR[J]. Remote Sensing Technology and Application, 2013, 28(6): 1033-1038. (in Chinese)
[2] 许春晓, 周峰. 星载激光遥感技术的发展及应用[J]. 航天返回与遥感, 2009, 30(4): 26-31. XU Chunxiao, ZHOU Feng. Development and Applications of Space-borne Laser Remote Sensing Technology[J]. Spacecraft Recovery & Remote Sensing, 2009, 30(4): 26-31. (in Chinese)
[3] 杨浩, 游安清, 潘文武, 等. 车载激光雷达三维点云重构与漫游方法[J]. 太赫兹科学与电子信息学报, 2015, 13(4): 579-583. YANG Hao, YOU Anqing, PAN Wenwu, et al. Reconstruction of 3D Point Cloud Based on Vehicle-borne LiDAR and Research on Roaming Methods[J]. Journal of Terahertz Science and Electronic Information Technology, 2015, 13(4): 579-583. (in Chinese)
[4] 汪开理. 三维激光点云与全景影像匹配融合方法[J]. 测绘通报, 2013, 12: 130-131. WANG Kaili. The Method of Fusion of 3D Laser Point Cloud and CCD Image[J]. Bulletin of Surveying and Mapping, 2013, 12: 130-131. (in Chinese)
[5] 陈振娇, 徐新宇, 张猛华. EDMA3数据传输方式在视频图像处理系统中的应用[J]. 电子与封装, 2015, 15(4): 28-31. CHEN Zhenjiao, XU Xinyu, ZHANG Menghua. Data Transfers by EDMA3 in Video Image Processing System[J]. Electronics & Packaging, 2015, 15(4): 28-31. (in Chinese)
[6] 但永平, 彭红涛, 王东云, 等. EDMA3在图像数据快速传输中的应用[J]. 液晶与显示, 2013, 28(1): 99-104. DAN Yongping, PENG Hongtao, WANG Dongyun, et al. Application of EDMA3 in Rapid Transmission of Image Data[J]. Chinese Journal of Liquid Crystals and Displays, 2013, 28(1): 99-104. (in Chinese)
[7] 刘力, 张鹏, 杨军. 基于EDMA3控制器的多通道音频数据传输[J]. 电声技术, 2014, 38(8): 59-61. LIU Li, ZHANG Peng, YANG Jun. Multi-channel Audio Data Transmission Based on EDMA3 Controller[J]. Audio Engineering, 2014, 38(8): 59-61. (in Chinese)
[8] KeyStone Architecture Enhanced Direct Memory Access (EDMA3) Controller User Guide[Z]. Texas Instruments, 2014.
[9] 李静, 安康. EDMA3在视频采集和显示系统中的运用[J]. 实验室科学, 2010, 13(1): 81-84. LI Jing, AN Kang. Application of EDMA3 in Video Capture and Display System[J]. Laboratory Science, 2010, 13(1):81-84. (in Chinese)
[10] 刘嵩, 喻胜辉, 刘海华, 等. 基于EDMA的多通道数据传输的实现[J]. 计算机测量与控制, 2009, 17(7): 1429-1434. LIU Song, YU Shenghui, LIU Haihua, et al. Realization of Multi-channel Data Transmission Based on EDMA[J]. Computer Measurement & Control, 2009, 17(7): 1429-1434. (in Chinese)
[11] 余福荣, 罗海波, 胡宇, 等. 基于DSP处理系统的多路数据传输方法与实现[J]. 电子技术应用, 2014, 40(4): 25-28. YU Furong, LUO Haibo, HU Yu, et al. The Method and Implementation of Multi-channel Data Transmission Based on DSP Processing Systems[J]. Application of Electronic Technique, 2014, 40(4): 25-28. (in Chinese)
[12] 张丽娜, 张涛. EDMA3在实时视频解码中的应用[J]. 电视技术, 2014, 38(9): 81-84. ZHANG Lina, ZHANG Tao. Application of EDMA3 in Real-time Video Decoding [J]. Video Engineering, 2014, 38(9): 81-84. (in Chinese)
[13] 肖亮, 张学健. 基于多核DSP的超声成像处理算法的并行实现[J]. 电子技术应用, 2013, 39(6): 27-30. XIAO Liang, ZHANG Xuejian. Parallel Implementation of Processing Algorithm of Ultrasound Imaging Based on Multi-core DSP[J]. Application of Electronic Technique, 2013, 39(6): 27-30. (in Chinese)
[14] 周礼庆. 嵌入式视频处理 EDMA 数据存储[J]. 科技情报开发与经济, 2011, 21(12): 112-113. ZHOU Liqing. Embedded Video Processing for EDMA Data Storage[J]. SCI-TECH Information Development &Economy, 2011, 21(12): 112-113. (in Chinese)
[15] 谭钦红, 张艳, 刘永强. 基于TMS320DM6437的4通道视频数据的高速传输[J]. 电视技术, 2014, 38(11): 71-73. TAN Qinhong, ZHANG Yan, LIU Yongqiang. High-speed Transmission of Four-channel Video Data Based on TMS320DM6437[J]. Video Engineering, 2014, 38(11): 71-73. (in Chinese)
[16] 顾永红. 基于EDMA3实现TMS320C64X与FPGA的数据传输[J]. 信息化研究, 2012, 38(4): 61-63. GU Yonghong. The Application of Remote Service in Cloud Patent Examination[J]. Informatization Research, 2012, 38(4): 61-63. (in Chinese)
[17] 陈振华, 邓少芝, 许宁生. EDM A数据传输方式在基于DSP的视频信号处理系统中的应用[J]. 液晶与显示, 2007, 22(6): 719-724. CHEN Zhenhua, DENG Shaozhi, XU Ningsheng. Data Transfers by EDMA in Video Signal Processing System[J]. Chinese Journal of Liquid Crystals and Displays, 2007, 22(6): 719-724. (in Chinese)
[18] TMS320C6678 Multicore Fixed and Floating-Point Digital Signal Processor Data Manual[M]//Texas Instruments, 2014.
[19] Keystone Architecture DDR3 Memory Controller User's Guide[Z]. Texas Instruments, 2015.
[20] TMDXEVM6678L EVM Technical Reference Manual Version 2.0[Z]. Texas Instruments, 2011.
Application of EDMA3 in Real-time LiDAR Point Cloud Calculation
LIU Chao1,2LI Chuanrong1HU Jian1HE Wenjing1NIU Jingyu1,2MENG Fanrong1
(1 Key Laboratory of Quantitative Remote Sensing lnformation Technology, Academy of Opto-electronics, Chinese Academy of Sciences, Beijing 100094, China)
(2 University of Chinese Academy of Sciences, Beijing 100049, China)
Due to the high demand for real-time processing of the in-orbit, airborne and vehicle Light Detection And Ranging (LiDAR) point cloud calculation and their massive data volume, the LiDAR data should be processed in high-speed internal memory in DSP. To solve the problem that the internal memory is usually small for the LiDAR data, a data cache mechanism is established using high-speed internal memory in DSP and large-size external memory, and a Ping-Pong buffering method based on Enhanced Direct Memory Access (EDMA3) is used to transmit LiDAR data between the two level cache blocks for point cloud calculation. With considering the format of LiDAR data, it is segmented into several pieces along its row. By using the EDMA3 Ping-Pong buffering method and the DSP’s CPU read/write method, the LiDAR data transmission test is performed on DSP development board for data segmentations of different sizes. Bycomparing the data transmission performance of the two methods, the improvement of Lidar data transmission rate made by the EDMA3 Ping-Pong buffering method is verified. The determination of data segmentation size to best improve the LiDAR data transmission rate is deeply discussed, making reference to the implementation of the real-time point cloud calculation.
point cloud calculation; digital signal processor (DSP); the third generation enhanced direct memory access (EDMA3); ping-pong buffering
TP319
A
1009-8518(2016)06-0057-09
10.3969/j.issn.1009-8518.2016.06.007
刘超,男,1989年生,2012年获山东大学通信工程专业学士学位,现在中国科学院大学电子与通信工程专业攻读硕士学位。研究方向为嵌入式数据处理。E-mail:liuchao13@mails.ucas.ac.cn。
(编辑:刘颖)
2016-03-15
国家863主题项目(2015AA123801)
李传荣,男,1956年生,研究员。研究方向为遥感地面系统工程与新型遥感器应用。E-mail:crli@aoe.ac.cn。