工业机器人在电机行业高速冲床的应用
2016-01-31于晓东李科孙震礼
于晓东 李科 孙震礼
(安徽埃夫特智能装备有限公司,安徽芜湖,241009)
工业机器人在电机行业高速冲床的应用
于晓东李科 孙震礼
(安徽埃夫特智能装备有限公司,安徽芜湖,241009)
摘 要本文对电机转子定子加工工艺过程进行分析,以安徽埃夫特智能装备有限公司自主研发的ER50-C20工业机器人为应用对象,结合电机转子定子生产工艺,实现使用机器人对电机转子定子的自动化加工和生产。结果表明,应用机器人生产电机转子定子大大提高了生产效率,产品品质也得到有效控制。
关键词:机器人,电机转子定子,磁性分张器,仿真
0 引言
多年来,在电机转子定子加工领域,生产自动化还停留在较低的生产水平,整个加工过程多采用人工进行上下料工作。随着人员成本不断上涨,企业加工产品的利润率越来越低,而且人工进行上下料,存在危险度大、效率低、次品率高等问题。为了提高产品性能,降低人工在生产过程中的不利因素,部分生产厂家开始使用机器人进行机头的上下料工作。
机器人作为智能装备,具有精度高、稳定性好、柔性化高等特点,使用机器人不但可以减低人员成本,提高设备利用率,还可以有效控制产品质量。本文以安徽埃夫特智能装备有限公司开发的ER50-C20机器人为应用对象,通过仿真软件规划机器人工作路径,实现机器人对电机转子定子进行机械加工。结果显示,使用机器人进行上下料不仅改善了产品质量,还减轻了员工的劳动强度,降低了企业对员工生产技能的要求。
1 机器人结构及参数
ER50-C20为6自由度串联机器人,内用高性能IPC加实时系统机器人控制器,可以实现高精度同步控制,机器人具有动态性能好、定位精度高、维护和系统诊断方便、安全机制更完善等特点。
机器人主要由电控系统以及机械本体构成,该项目中机器人末端抓具采用端拾器、磁性吸盘、真空吸盘、真空发生器组成抓手,并附带气路单元、主站PLC等。机器人模型见图1,主要参数如表1所示。

图1 ER50-C20机器人模型
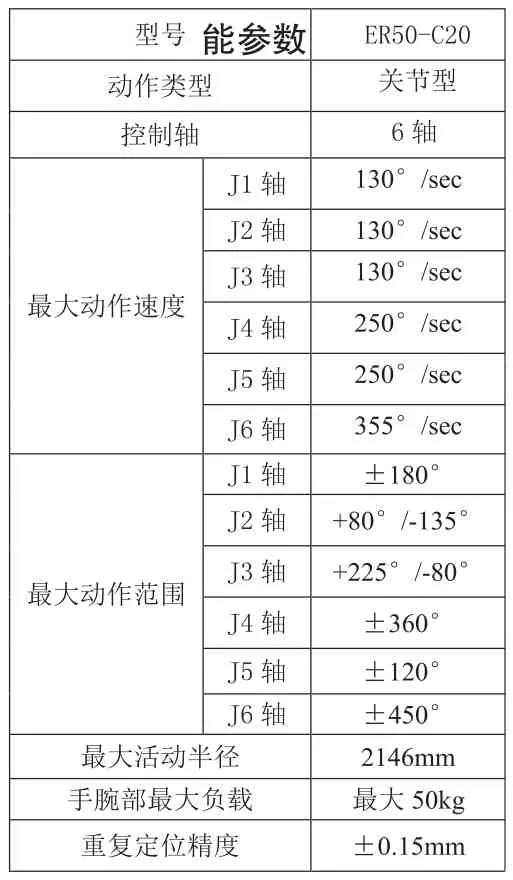
表1 ER50-C20机器人主要性
2 项目工艺分析
机器人进行电机转子定子加工的工艺如下:
机器人在原位等待,人工将板件放到上件位置。上件位设置定位对中装置,定位装置上设置磁分张装置,负责把每个板件分离开,便于机器人抓取,避免误抓两层板件。机器人收到冲床信号和外部启动信号后,运动到板件上方抓取位置,通过吸盘抓手抓取工件,一次抓取一个工件,运行到冲床加工区,放入被加工板件,冲床检测到板件到位信号后开始作业。冲床加工完成,机器人得到完成信号,
由机器人运动到下件位置,进行工件的堆放,放满一定高度后,由人工将板件取走。下料位置放件区设置安装检测开关,每次放件时必须确认该区域是否放置满,如没有放置满可以进行放件作业。机器人要避免碰撞,放置完成后再回到上件抓取位置进行下一作业抓取。以此循环。

长度单位:mm图2 整线平面布局图

图3 机器人抓手
整线采用PLC控制,profibus总线通信,平均上下料节拍14s,详细布局图如图2所示。
3 抓具及磁性分张器
3.1 抓具
项目中使用的机器人抓手可以根据厂家提供的产品数模或实际样品进行设计,抓具采用端拾器磁性吸盘和真空发生器组成,详细结构如图3所示。
3.2磁性分张器
在汽车、家电、工程机械等钢铁薄板应用行业,码垛后的各层钢板之间由于存在油膜或真空负压现象,最上层钢板不易取起,必须在垛料的侧面和端面放置磁力分张器,通过其强大的同极性磁力,使最上层钢板与下层板料相互排斥而产生15mm以上的大间隙,以便抓具逐层取用板料。
本项目采用磁性分张器把每个板件分离开,便于机器人抓取,以免其误抓两层板件,损坏高速冲床,磁性分张器示意图如图4所示。
4 机器人控制系统
整个工位设备包括:上料台、下料台、ER50-C20机器人、机器人用磁性吸盘抓具、按钮盒、PLC控制系统、磁性分张工装以及安全防护设施。
4.1系统控制
单台机器人控制流程图如图5所示。
4.2工位仿真布局
通过使用DELMIA离线仿真软件,对现场机器人进行工艺细节规划,并对应用环境及产品、工装的三维模型进行仿真验证,从而验证机器人抓手以及机器人与高速冲床之间是否存在干涉。同时,根据仿真结果测算机器人
上下料工作节拍,确认机器人安装尺寸,各个机床摆放位置,验证机器人可达范围,保证机器人与机床之间最大有效服务距离等。详细仿真图如图6所示。
4.3机器人示教
人工通过机器人手持示教器对该项目轨迹编写记录,进行机器人位姿修改、拆垛码垛相关技术参数设置、IO信号交互相关设置,完成机器人与机器人的配合。经过初次调试后,再优化机器人运动轨迹,删除部分多余运动轨迹点,缩短机器人信号通信时间,提高机器人工作效率,并通过设置机器人干涉区,防止机器人之间以及机器人与机床的潜在碰撞,提高生产线稳定性。当两台机器人存在潜在碰撞危险时,第一台机器人优先发出进入干涉区信号,防止其他机器人进入潜在碰撞区。
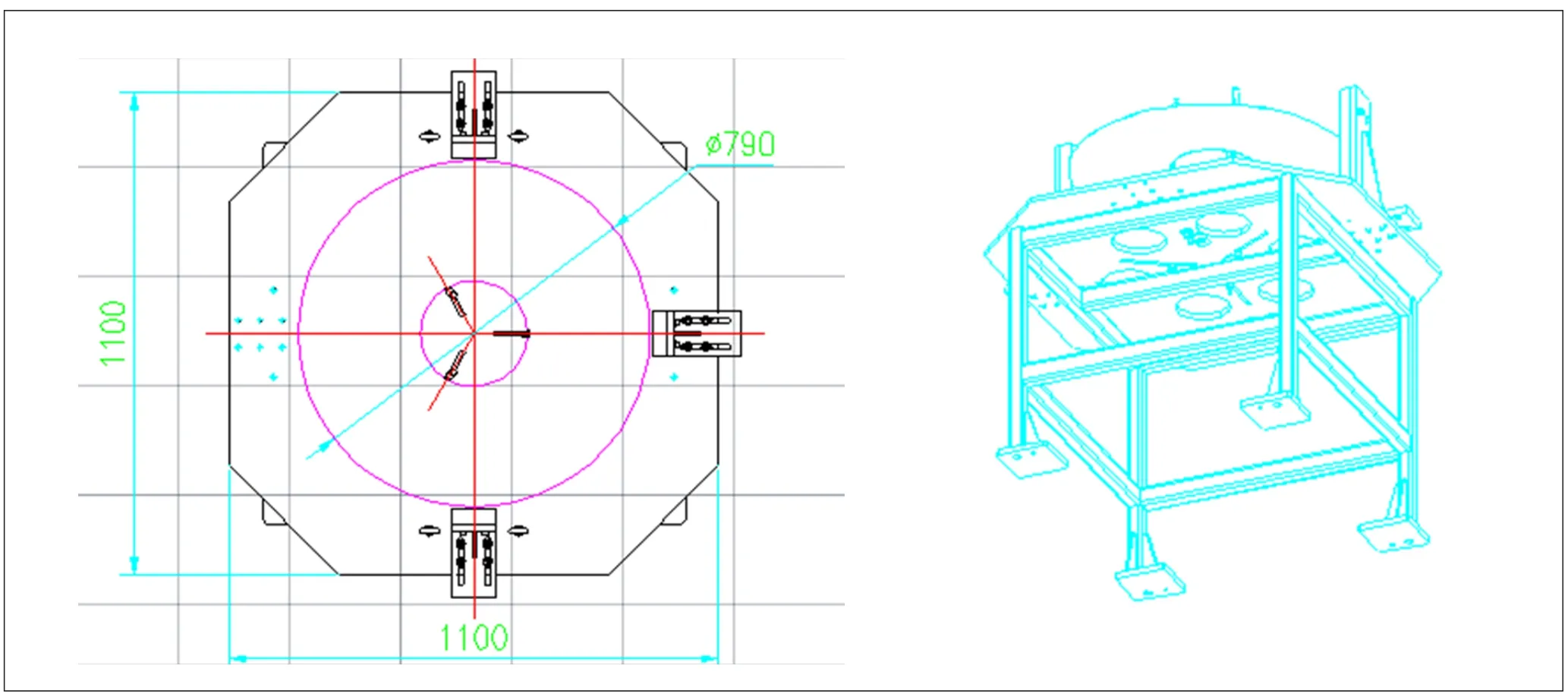
图4 磁性分张器 长度单位:mm

图5 单台机器人控制流程图

图6 机器人三维布局图
5 总结
使用机器人进行电机行业转子定子上下料工作,可以完成2台高速冲床的上下料作业,整个项目不但降低了员工劳动强度,还提高了产品质量和产量,并降低了产品在生产过程中存在的潜在风险,不但加工精度得以保障,而且废品率也大幅降低,产品一致性以及质量远远高于人工生产的产品。