爬壁机器人能源工业应用与发展
2016-01-31桂仲成
桂仲成
(京东方科技集团股份有限公司,北京,100176)
爬壁机器人能源工业应用与发展
桂仲成
(京东方科技集团股份有限公司,北京,100176)
摘 要本文对爬壁机器人在能源工业的应用进行分析,对爬壁机器人关键技术与发展进行研究,并提出其工业应用研发技术路线发展建议。
关键词:爬壁机器人,能源工业
1 爬壁机器人工业应用
1.1 定义
爬壁机器人[1]是一种可以在各式各样壁面上攀爬、携带作业工具及附属设备并完成特定作业的移动机器人,主要代替人从事危险、繁重的现场作业,无须安装脚手架,可提高作业效率、提升作业质量并保障作业安全。其工业应用主要包括:
检查与检测:包括电厂设备、输电电缆、管道、石化储罐、船舶、海洋平台、桥梁等设施的检查和无损检测等;
材料加工:包括石化储罐、船舶、海洋石油平台等的切割、焊接、打磨、喷涂等;
维护:包括船舶、飞机等的除锈以及高层建筑物的清洗等;
其他:包括货物运输、救援、公共安全等。
1.2 能源行业应用
1.2.1 应用需求
本节重点对以能源转化为核心应用的爬壁机器人需求进行分析。其中,电厂外部主要包括资源运输以及电力输送设备,资源运输涉及的设施包括船舶、管道、火车、储罐等,电力输送涉及的设施包括电缆等;发电设备主要包括锅炉、汽轮机、发电机、核岛装备、风机等。
能源变化过程涉及的主要设备往往是大型设备,其特征是“重、大、结构复杂”,很多制造环节还是手工作业,有时还必须在现场作业,这其中又以焊接作业最为典型,此类部件是实现制造自动化的瓶颈。
为提升制造水平、提高生产效率与质量,迫切要求实现大型结构件焊接等作业的自动化。但是,传统的工业机器人或专用自动化装备由于在移动灵活性和柔性(智能)等方面受局限,很难在这种场合应用,故迫切需要新的解决方案。解决这一问题的思路之一是采用比工件更大的自动化系统,但这种自动化系统的成本很高且适用的产品种类有限,因此,此类大型自动化系统竞争力较弱。爬壁机器人可在工件表面全方位移动并能适应不同种类的工件,在作业灵活性和柔性等方面具备很大的优势且成本相对较低,因此其在大型钢结构件的焊接(包括切割)、喷涂、无损检测等作业中具有广阔的应用前景。
另一方面,能源设备往往都是重要的基础设施,一般均需要定期检修。以大型发电设备检修为例,这些设施的检修或者需要撘脚手架、或者需要把检修对象拆下来在车间内进行检修,这造成检修周期长。如果能够免除搭、拆脚手架或者拆卸安装检修对象的工序,能在现场完成检修,这可以减小非必须的辅助工序时间(拆卸、安装、调试等),会产生巨大的经济效益。另外,在某些场合下,由于环境的限制(如放射性的场所、高空),工人进行检修作业存在巨大的安全隐患。而由各式各样的爬壁机器人进行上述检修作业,不仅可以缩短检修周期、提高检修作业效率,也可以提升作业质量和保障作业安全。因此,从上述角度来说,爬壁机器人在此类检修作业中应用前景广阔。
综上所述,爬壁机器人在能源转化涉及的海洋石油平台、船舶、管道、储罐以及大型发电设备等设施的制造(或建造)以及在役检修维护方面具有很大的市场潜力。
1.2.2 应用现状
本节重点对已经工业化应用或生产的典型机器人产品进行介绍。
1)Alstom Inspection Robotics
该公司由Alstom(瑞士)和Swiss Federal Institute of Technology于2006年合资成立,致力开发适用于电厂、化工以及石化工业设施自主检测的机器人产品。目前已开
发出系列检查机器人,主要有:
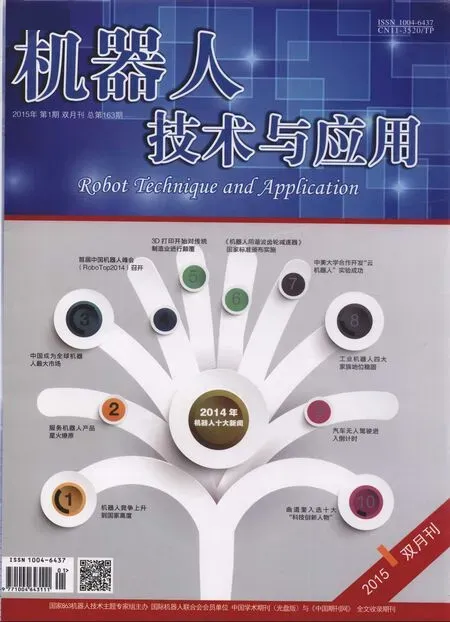
A) Alstom模块化大表面检测机器人
该机器人自重12 kg,尺寸为410mm×45mm×410mm,负载能力10kg,如图1(a)所示。机器人采用磁轮吸附(可跨越10mm高的障碍物),远程控制,可自主跟踪焊缝以及特定的轮廓,具有自主防碰能力,可集成8-16通道超声检测仪以及4通道涡流检测仪、摄像头以及水枪等工具,并具备检测数据自动记录与自主创建缺陷分布图功能,可用于船舶、大型储罐与容器、压力水管以及风机塔架等大型表面的检查。
B) Alstom小型四轮检测机器人
Alstom小型四轮检测机器人,采用永磁吸附方式(间隙吸附),可携带超声等检测仪器,具备数据自动记录和处理功能,远程控制,如图1(b)所示,可用于转子等规则零部件的无损检测。
C) Alstom Magnebike检测机器人
Alstom Magnebike机器人自重3.5kg,尺寸180mm× 130mm×220mm ,如图1(c)所示。机器人采用磁轮吸附、自行车运动机构,具备很强的壁面适应能力,可用于汽轮机蒸汽室等复杂结构的现场检测。
D)Alstom定子检测机器人
该机器人高度仅有9mm,轴向采用磁轮驱动,周向采用“蠕动“方式移动,适用于定子在役检测,如图1(d)所示。
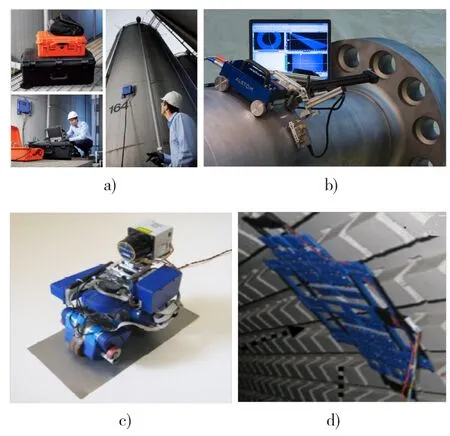
图1 Alstom 系列检测机器人
2)GE Energy
A)GE管道检测机器人
GE开发了适用于6-30英寸(15.2-76.2cm)管道检测的系列机器人,如图2(a)所示。机器人采用有缆方式供电和传输数据,可在弯道(1.5倍管子直径)内行走,可携带视觉、超声检测等工具,最大行驶距离1000英尺(约300m),可用于核电站、油气运输、精炼厂等管道的检测。
B)GE Magic定子检测机器人
GE开发的适用于电机定子检测的机器人高度约12 mm,可完成定子的在役检测,如图2(b)所示。

图2 GE检测机器人
3)Olympus
WeldROVER机器人可进行全自动数据采集、操作简便的电动扫查,如图3所示。机器人采用四磁轮吸附方式,具备激光导引焊缝跟踪功能。最多可使用6个探头,具有UT、TOFD、PA功能,可对铁磁性管件或容器进行高效的相控阵焊缝检测。
4)Jireh Industries
加拿大Jireh Industries公司开发了两款无损检测机器人产品Navic和Tripod,如图4和图5所示。Navic尺寸为21cm× 2.6cm×25.4 cm,自重7.7kg,采用模块化的结构,由2个模块组成,每个模块采用2个磁轮,模块间通过铰链连接,适用表面最小直径为70mm(周向检测)、305mm(轴向检测),远程控制,可自主跟踪焊缝,
可携带各种检测仪器。

图3 Olympus检测机器人

图4 Navic检测机器人

图5 Tripod检测机器人
Tripod机器人采用3磁轮机构,尺寸为45cm× 16.5cm×39.3 cm,自重13.6kg,负载能力为13.6kg,远程控制,可以携带摄像头、检测仪器等工具。
这两款机器人均可选配焊缝跟踪、安装拆卸辅助装置、电动扫描支架等模块。
5)Silverwing
英国Sliverwing公司开发了Scorpion B-scan 无损检测机器人,该机器人采用四轮独立驱动机构,永磁(间隙)吸附方式,尺寸为385 mm ×222 mm ×102 mm,自重4.75kg,可携带13.6kg的负载,如图6所示,可远程控制,自动记录检测数据,本体由电池驱动,脐带线最长可达50m。该机器人有一项特殊设计是采用轮式超声检测探头,它可以和机器人无缝集成。根据大小、适应的壁面不同等,公司已开发了3种型号的机器人。
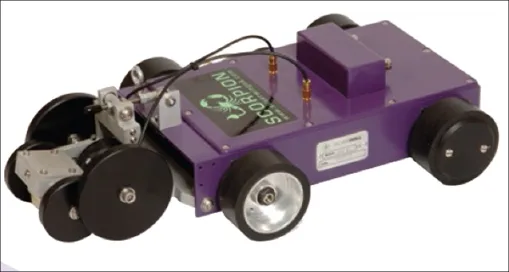
图6 Scorpion B-scan检测机器人
6)Buckeye Partners
Buckeye Partners开发的Smart PIG管道检测机器人,依靠管道内液体的压力驱动机器人沿着管道运动并完成检测作业,如图7所示。
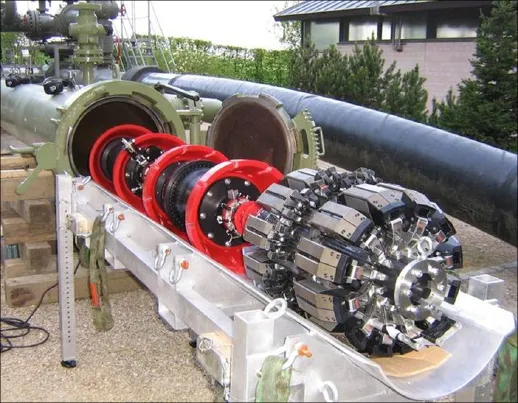
图7 Smart PIG管道检测机器人
7)Chariot Robotics
Chariot Robotics 有限责任公司从美国National Robotic Engineering Center购买了相关专利,开发用于船舶等表面除锈的机器人,如图8所示。该机器人采用永磁吸附方式、轮式移动机构,使用高压水枪除锈工艺。
8)Robotic Technologies of Tennessee
从2007年开始,美国自然科学基金——小企业创新基金分两次(2007年、2009年)资助Robotic Technologies of Tennessee研发爬壁焊接机器人样机。2012年左右,工程样机已在美国多个船厂应用和完善。
该机器人采用永磁履带机构,具备焊缝跟踪功能(采用Servo Robot或Meta传感器)。机器人尺寸约47cm×47cm× 26cm,自重约30kg,负载能力约45kg,如图9所示。
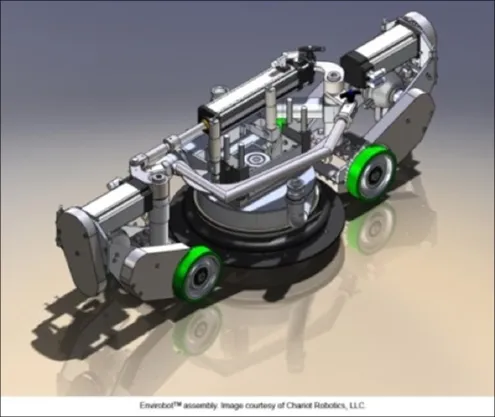
图8 Chariot Robotics除锈机器人

图9 Tennessee焊接机器人
9)中国东方电气集团有限公司[2]
中国东方电气集团开发了大型钢结构用爬壁焊接机器人工程样机,该机器人采用轮式移动机构,间隙面吸附装置和磁轮的永磁复合吸附装置,可自主跟踪焊缝并进行焊接作业。该爬壁机器人重25kg,可以携带超过60kg的负载,可原地转向,如图10所示。机器人已在大型发电设备焊接中应用验证。

图10 东方电气智能爬壁焊接机器人
10)科沃斯
苏州科沃斯电器公司开发了擦窗机器人“窗宝”,采用真空吸附方式,如图11所示。
1.2.3 小结
从上述调研可以看出,市场上已经存在了一定数量的爬壁机器人产品,这些产品在管道、船舶、储罐、发电设备的检查与检测等方面已经得到了较广泛应用,在大型结构件焊接与维护方面的应用也开始起步。
Alstom、GE、Olympus等设备制造商重视爬壁机器人的开发,但是相对于能源行业需求来说,现有产品种类和功能还比较单一,应用推广的普及程度也远远不够,爬壁机器人在能源行业的应用还有很大潜力可挖。
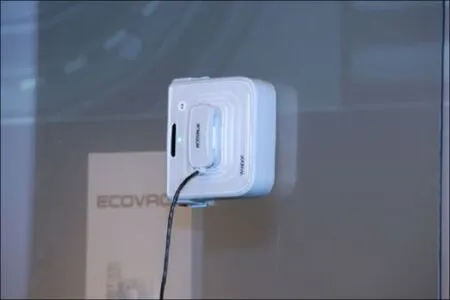
图11 科沃斯擦窗机器人
2 爬壁机器人关键技术与发展
作为移动作业机器人的一种,爬壁机器人关键技术主要包括爬壁机构技术和控制技术。其中,爬壁机构技术是爬壁机器人的专有技术,控制等技术和其他类型移动机器人类似,如图12所示。
本节主要对爬壁机构技术及发展进行分析,主要包
括吸附、移动以及壁面适应(或越障)三个方面。其中,吸附机构技术从控制模式上可以分为被动吸附方式和主动控制吸附两种,移动机构从适用的壁面类型来说可以分为2D移动机构和3D移动机构。
2.1 爬壁机构技术
2.1.1 吸附机构技术
1)机械吸附
机械吸附方式主要模仿人攀爬壁面以及登山装置的原理,典型方式如图13所示。
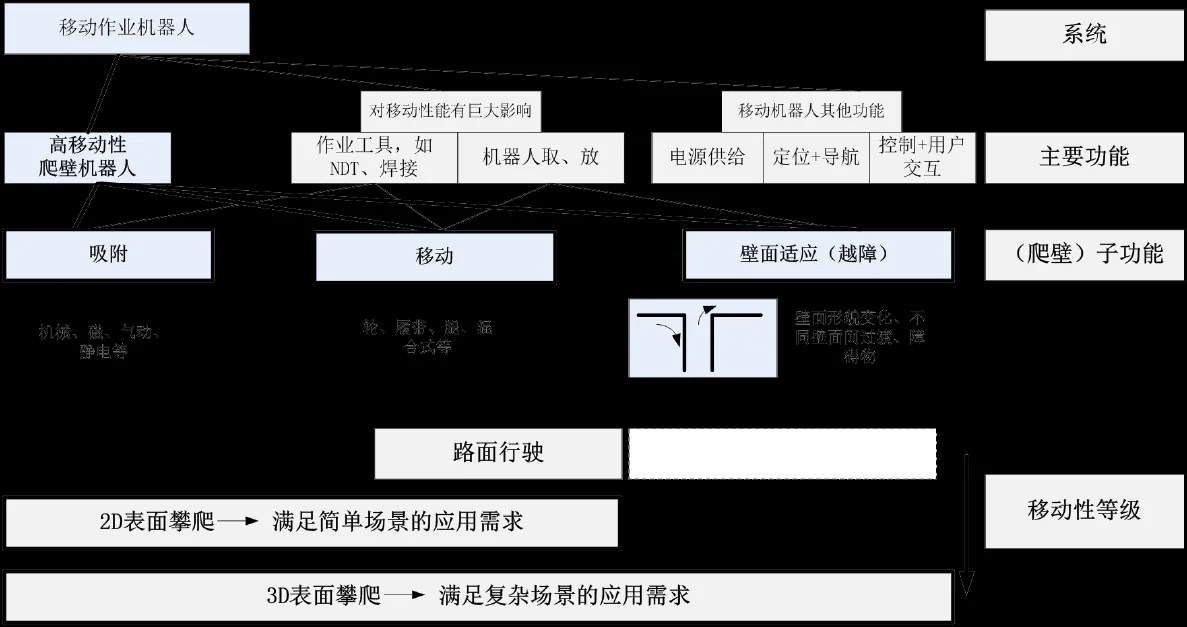
图12 爬壁机器人关键技术
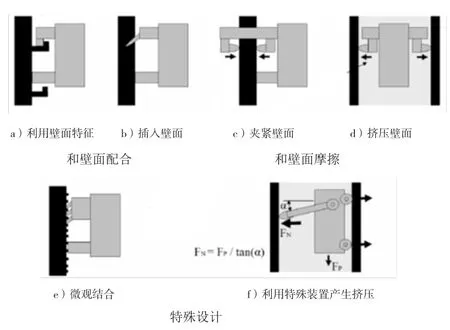
图13 典型机械吸附方式原理
最直接的壁面攀爬方式是利用壁面上已有的特征;如果没有合适的特征可以利用,一个替代办法是利用特定的装置插入壁面;或者是上述两种方式的结合,即在软的壁面采用插入方式,在硬的表面采用利用壁面特征的方式。此类吸附方式的优点是机器人的负载能力仅受其与壁面连接强度的限制,缺点是此类吸附方式一般不能采用连续运动机构(如轮式移动机构),往往无法在天花板上使用,应用受到很大限制。
如果必须使用轮式等连续运动机构,一个机械吸附的替代解决方案是通过机器人和壁面之间的挤压产生的摩擦力进行承载。为了产生挤压力,往往采用弹性机构或者主动控制装置,或者两者结合使用。此类装置往往利用杠杆、锲以及凸轮或者类似的机构将重力转化成挤压力。采用机械吸附的爬壁机器人例如:SpinyBot II[3]使用带极小刺的脚插入壁面以保证其对壁面的吸附;Tree bot[4]利用其和树干表面的抓紧力实现攀爬,3dclimber[5]利用机器人和管状壁面之间的夹紧力实现攀爬;Toshiba 1'' tube crawler[6]利用轮子或履带和壁面之间的挤压力产生摩擦力,实现在管道内的吸附。采用机械吸附方式的爬壁机器人在管道检测领域已实现了较大规模应用。
2)磁吸附
如果壁面是铁磁性的,采用磁吸附方式往往是优先选择。磁吸附方式可分为电磁吸附和永磁吸附两种。电磁吸附方式的优点是吸附力可调节,缺点是需要能源供给且很难和轮或者履带集成。永磁吸附方式,无须能源供给,能量密度高且易于和轮或履带等运动机构集成,从而得到了更广泛的应用,但其缺点是吸附力调节相对困难。
永磁体安装方式主要包括安装在腿式运动机构的脚上、轮子里、履带上(直接接触吸附)或者底盘上(非接触吸附)。永磁体安装在底盘的好处是磁体表面吸附的铁屑等不会对机器人的运行稳定性产生影响(和直接接触吸附相比)。磁轮吸附方式的优点是吸附力对壁面曲率变化的敏感度低(和非接触吸附相比)。
采用磁吸附方式的典型机器人包括:Robinspec[7]采用电磁吸附方式、腿式移动机构,OmniClimbers[8]采用万向磁轮机构,WCWR[9]采用轮式移动机构、可调间隙永磁吸附装置,Tripillar[10]采用永磁吸附装置、履带式移动机构。几十年以来,磁吸附爬壁机器人已在船舶、储罐检测等工业领域得到了广泛应用。
3)气动吸附
气动吸附又称为真空吸附,主要包括吸盘(被动式和主动式)、真空室、漩涡三种方式。其中,漩涡吸附方式能量密度相对较高。
典型的气动吸附爬壁机器人包括:Roma II[11]采用主动吸盘、腿式移动机构,City Climber[12]采用漩涡吸附、轮式移动机构。
气动吸附方式可适用于非导磁性壁面,但是为产生吸附力需要能量供给,且能量密度较低,对壁面的光滑度等要求较高。由于上述缺点,气动吸附爬壁机器人尚未在工业领域广泛应用,但科沃斯公司开发的“窗宝”机器人已开始商品销售。
4)静电吸附
静电吸附方式适用于非导磁性壁面。Stanford大学研制有采用履带式移动机构的静电吸附爬壁机器人[13]。据研究者称,这种吸附方式的能量密度较高且能量消耗较低,但技术仍然在开发中。
5)干吸附和粘着吸附
干吸附和粘着吸附方式主要模仿壁虎的攀爬方式,理论上适用于各种壁面,典型如六足式StickyBot机器人[14],但是到目前为止,这类机器人仅在干净的玻璃表面测试过,研究者称这种吸附方式可以适用于更困难的壁面。
6)小结
总体来说,采用同一种吸附原理的主动吸附方式往往比被动吸附方式的吸附能力更强。但是,其最大劣势是主动吸附方式需要能量供给,一旦能量供给失效,爬壁机器人将从壁面上摔落。
由于上述原因,永磁吸附方式比电磁吸附方式应用前景更好。但是在非磁吸附方式里,主动吸附方式更常见。气动吸附方式往往采用主动吸附方式(真空室或者漩涡),静电吸附只能采用主动吸附方式。关于采用各种吸附原理的主动、被动吸附的性能比较如表1所示。

表1 典型吸附原理性能比较
在工业领域已经应用的爬壁机器人主要采用机械或磁吸附方式。气动、静电以及干粘着吸附等方式由于其低可靠性、对壁面要求高或仅能和摆腿式机构集成、或由于技术尚不够成熟,尚无法在工业领域广泛应用。
2.1.2 移动机构技术
爬壁机器人的移动机构依据不同的分类标准可以分为下列几类:从基本的运动概念来说可以分为滚动—腿式和摆动—腿式,两者又可以组合形成混合式移动机构;从接触的瞬态特性来说可以分为连续式和离散式;从接触的面积来说,可以分为小足式和大足式。综合来说,主要有6种基本的移动机构,如图14所示。
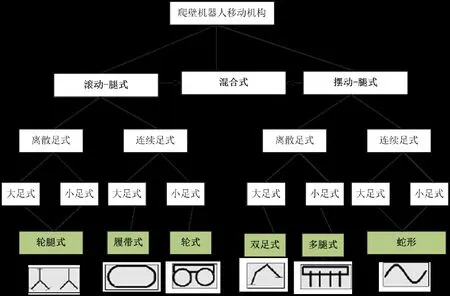
图14 爬壁机器人移动机构分类
1)滚动—腿式移动机构
在滚动—腿式移动机构中,爬壁机器人最常用的是轮式移动机构。文献[15]设计的机器人采用两轮结构,尾部设计提升了机器人壁面运行稳定性和适应性,吸附磁铁集成在车轮里。文献[16]设计的机器人采用带悬挂的两轮机构和漩涡吸附装置。
轮式爬壁机器人运动速度快,控制简单,机构相对也简单。但是,轮式移动机构有缺点:会被壁面上的空洞或者间隙卡住,遇到内拐角时也有可能被卡住,无法适应结构复杂的壁面;有些吸附装置无法集成到轮子里。
由于上述原因,有些爬壁机器人使用履带式移动机构,且吸附装置一般直接安装在履带上。文献[17]设计的机器人采用四履带结构,永磁吸附装置集成在履带上。
在平直壁面上,履带式由于吸附面积大,负载能力强,但是在曲面上尤其是凸面上,由于履带式机构固有的缺陷会造成吸附力下降,吸附履带易从壁面剥离造成机器人跌落,这个问题尚无法得到很好解决。同时,履带式机器人也存在转向困难的问题。
有一种兼具轮子和履带优点的轮履复合结构,较好解决了履带式吸附机构的剥离问题,但其运动是非连续的,这导致其在要求连续性的作业中无法应用。
2)摆动—腿式移动机构(摆腿式移动机构)
摆腿式移动机构主要用于攀爬结构复杂的壁面或者用于那些不能和履带式/轮式移动机构集成的吸附方式。
典型的采用摆腿式移动机构的爬壁机器人包括:两足大足式爬壁机器人(如City Climber[12])和多腿小足式爬壁机器人(如StickyBot机器人[14])。两足大足式爬壁机器人一般用于壁面结构非常复杂且要求高运动、灵活性的场合,多腿小足式爬壁机器人采用的吸附方式能力一般较弱(如被动式吸盘、类壁虎吸附)。
另外一种典型的摆腿式移动机构是蛇形移动机构,这种爬壁机器人一般用于杆状壁面或内管道壁面。蛇形移动机构的控制非常复杂。
和滚动—腿式移动机构相比,摆腿式运动机构的控制一般更复杂,这也导致其体积相对较大、运动速度相对较慢。但是,复杂性提高换来的好处是移动性的提升,尤其是两足式移动机构在摆腿式移动机构中最具应用前景。
3)混合式移动机构
有些爬壁机器人采用混合式移动机构,即摆动和滚动腿式移动机构的复合。混合式移动机构的优点是:高速和高移动性,其复杂性介于摆动和滚动腿式移动机构之间。

表2 各类移动机构在地面和爬壁机器人中应用的性能比较
典型的采用混合式移动机构的爬壁机器人包括:Alicia[18]采用三足轮式移动机构,Alstom开发的发电机定子检测机器人轴向采用轮式移动机构、周向采用框架式蠕动移动机构。
4)移动机构性能比较
对采用各种移动机构的运动性能进行比较,同时对采用类似移动机构的典型地面移动机构进行比较,结果如表2所示。
从比较中可以看出,采用同样移动机构的爬壁机器人和地面机器人的运动性能有很大区别,这主要由爬壁机器人的吸附力造成。
可以得出以下几个结论:
A)在爬壁机器人应用中,履带式、多腿式以及蛇形移动机构比其他形式的移动机构更容易丧失其固有的优点(和地面应用相比)。
履带式移动机构的接触面积大,在地面上移动时,其对各种各样地面(如沙地、泥地、石头等)的适应能力强,但当履带式移动机构用于爬壁机器人时,由于履带式机构固有的刚性导致其在小曲率凸面上易从壁面剥离。
当爬壁机器人采用多足式移动机构和蛇形移动机构时,由于各足的吸附力(或各关节)一般需要主动控制,这导致其复杂性较在地面上应用时更加复杂,此种机器人的体积重量往往较大,其应用受到限制。
B)在爬壁机器人应用中,双足式、轮式以及混合式移动机构比其他形式的移动机构更容易获得额外的优势(和地面应用相比)。
在地面应用中,双足式机器人是高度非稳定系统、控制复杂性高、地面适应性差。但是当双足式移动机构在爬壁机器人中应用时,由于吸附力的存在,其稳定性大幅提高且控制也更加简单,这往往是很大的优势,而且双足式爬壁机器人可以使用很多种吸附方式。
轮式移动机构在爬壁机器人中应用前景也相当广阔。典型的如采用自行车结构的爬壁机器人,它不仅具有一般轮式移动机构的优点,还能适用于各种复杂壁面的过渡(如90°内角、外表面过渡)。
采用混合式移动机构的爬壁机器人大幅提升了壁面适应性。举例来说,轮式爬壁机器人的移动性能已不错(中等),再结合几个主动控制关节,就可以适用于非常复杂壁面的攀爬。
C)从工业应用的角度来说,最具前景的移动机构是下列两种:一是两足式和混合式移动机构,主要由于其具
备高移动性能和合理的复杂性;二是轮式或轮腿式移动机构,主要由于其具备较好的移动性能和较低的结构和控制复杂性。
2.1.3 壁面适应技术
爬壁机器人在运行中所考虑的一个重要问题是,如何适应各式各样的壁面结构与形态变化,这包括适应壁面曲率与形貌的变化、不同壁面间的过渡、越障甚至运行介质的变化。典型的壁面变化如图15所示。解决壁面适应问题的关键是针对特定的应用设计合适的吸附与运动机构集成方案。
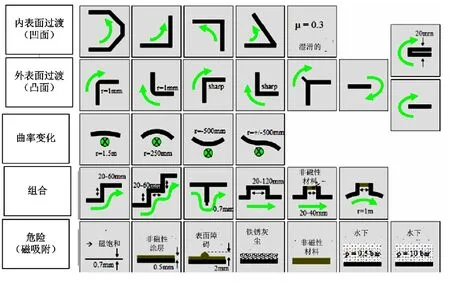
图15 典型的壁面变化示意
解决壁面适应问题的一个思路是尽量采用简单的机构并在必要时结合适当的辅助机构。例如:文献[2]采用三轮机构结合专门设计的磁体布置方案,这可以一定程度适应壁面凹凸的变化;文献[3]采用两轮机构辅以尾部结构,也可以较好适应壁面的变化;文献[4]采用两轮自行车结构、辅以主动连杆,可以适应复杂的壁面变化;文献[11]采用轮式移动机构结合吸附装置主动控制(提升或下降)的方案以适应壁面凹凸的变化。
采用此种思路的爬壁机器人往往仅能适应较小的壁面变化,或者能适应复杂的壁面变化但负载能力弱(此种机器人尺寸往往较小)。
解决壁面适应问题的另一个思路是采用基于“化大为小”的多体柔性轮式或履带式爬行机构,其特征是模块化且模块之间是柔性连接。例如:文献[19]提出了采用多个吸附装置,且吸附装置通过具有2-3个自由度的被动式铰链和本体连接的方案;文献[20]提出了采用多个模块化爬壁机器人、机器人之间通过机械手协作实现壁面适应的方案。采用此种思路的爬壁机器人结构和控制往往较复杂,但负载能力可以得到较大幅度的提升。
此外,还可通过采用足式移动机构解决壁面适应问题,但此类机器人结构和控制复杂,存在运动非连续的问题。
2.1.4 吸附与运动机构的集成
典型的吸附和运动机构的集成如表3所示。
从表3中可以看出,在工业领域得到应用的爬壁机器人往往是采用机械或磁吸附方式、轮式或履带式移动机构。这主要由下列原因造成:
A)只有机械式或者磁吸附的能量密度可以达到很高(提供足够大的吸附力)且不需要额外的能源(被动式吸附)。
B)滚动—腿式移动机构控制简单、结构紧凑,其移动性能可以达到很多工业应用的要求,且通过和特定机构的复合(如主动关节),即可取得非常好的移动性。
C)很多工业应用要求爬壁机器人能够连续快速运动,这也是轮式和混合式移动机构的优势。
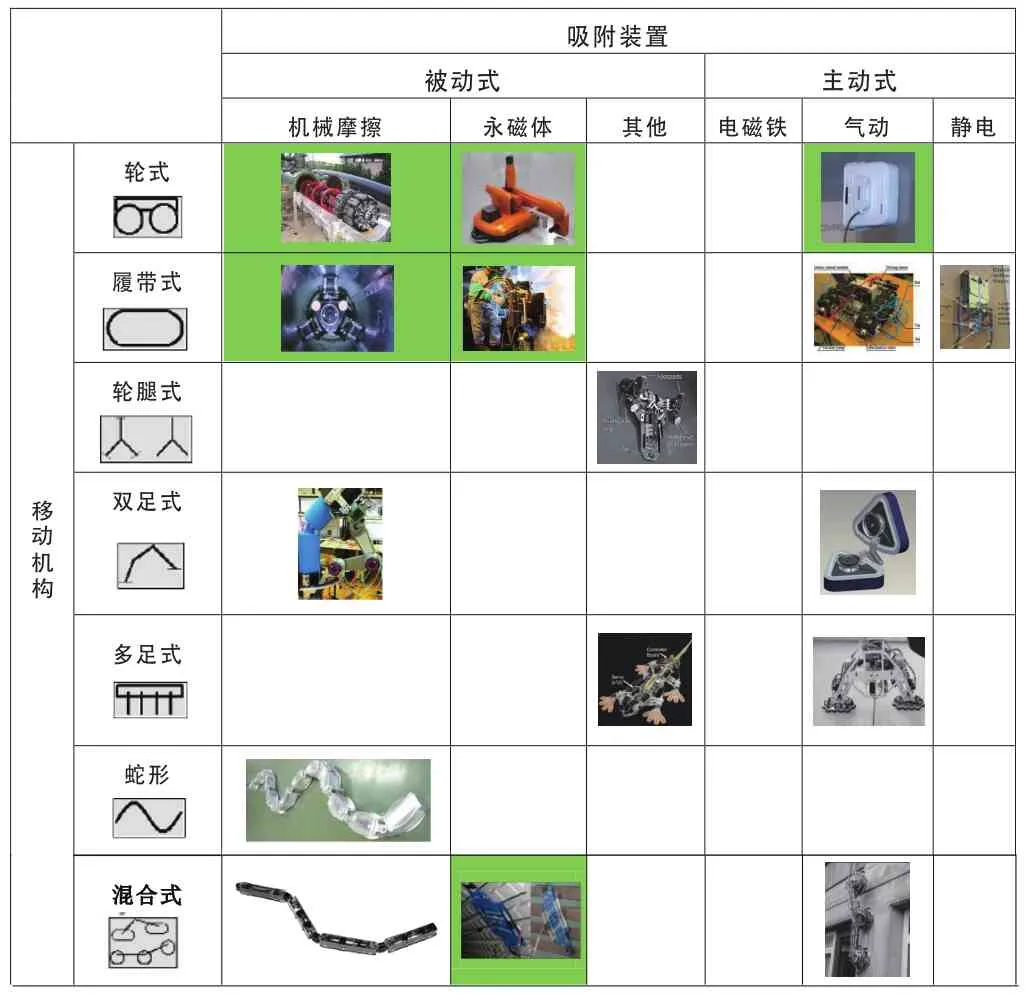
表3 典型的吸附和运动机构
2.2 其他关键技术
爬壁机器人从控制自主程度上可以分为远程遥控、半自主控制和自主控制三种。从工业应用的角度来说,现有的爬壁机器人主要采用远程遥控手动操作模式。但是随着技术的发展,半自主控制模式将得到越来越广阔的应用。在半自主控制模式下,由人进行高级层面的决策和规划,
机器人根据人规划的特定任务进行局部的自主运行。
由于爬壁机器人主要应用于制造、检测等作业,这要求机器人能够在3D壁面精确定位,并能根据作业任务自主规划作业路径和进行运动控制。为进行此类作业,相对一般的移动机器人来说,爬壁机器人对定位精度的要求更高,如焊接时要求机器人末端轨迹精度小于1mm。在工业环境里,可以考虑通过利用已有的环境特征或设置标识来实现精确定位;在标识不可用的情况下,则要求研究适用于爬壁机器人的高精度3D SLAM技术,这需要进行视觉传感器、距离传感器以及里程传感器等多传感信息的融合。
如果爬壁机器人必须无缆作业,还需要研究在(半)封闭或屏蔽复杂现场环境下高可靠的无线通信技术以及高能量密度的动力技术。
另外,爬壁机器人往往在复杂、危险的现场环境下作业,如何保证爬壁机器人运行的安全性和可靠性也是实现规模化工业应用的前提。
3 结语
爬壁机器人在能源行业涉及的海洋石油平台、船舶、管道、储罐以及大型发电设备等设施的建造以及在役检修维护方面应用前景广阔,目前已有爬壁机器人产品在上述领域得到了应用。但是,相对于应用需求来说,现有产品种类和功能还比较单一,应用推广的普及程度也远远不够。为实现爬壁机器人在能源行业的规模化应用,需要重点研究高度安全可靠的、经济的爬壁机构技术、控制技术以及与应用系统的集成技术。
参考文献
[1] Silva M F,Machado.J A T. A Survey of Technologies and Applications for Climbing Robots Locomotion and Adhesion, Climbing and Walking Robots// Behnam Miripour (Ed.), ISBN: 978-953-307-030-8, InTech, 2010.
[2] GUI Zhongcheng ,et al. A Wall-climbing Welding Robot for Large-scale Ferromagnetic Steel-structure Manufacture [C]. In proceedings of The 43rd Interlational Symposium on Robotics (ISR2012),Taipei, Taiwan, 2012:162-167.
[3] Kim S, Asbeck A T, Cutkosky M R,et al. Spinybot II: Climbing hard walls with compliant microspines. In proceedings of Int. Conf. on Advanced Robotics, 2005: 601-606.
[4] Lam TinLun, Xu Yangsheng. Climbing Strategy for a Flexible Tree Climbing Robot-Treebot[J]. IEEE Transactions on Robotics, 2011,27(6):1107-1117.
[5] Tavakoli M, Marques L, de Almeida A. Self Calibration of Step-by-Step Based Climbing Robots[C],In proceedings of The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems,2009:11-15.
[6] Suzumori K, Miyagawa T, Kimura M, et al. Micro inspection robot for 1-in pipes[J], IEEE/ASME Transactions on Mechatronics, 1999,4( 3): 286-292.
[7] http://www.robotic.diees.unict.it/robots/robinspec/robinspec.htm.
[8] Viegas M C, et al. OmniClimbers: Omni-directional magnetic wheeled climbing robots for inspection of ferromagnetic structures[J], Robotics and Autonomous Systems , 2013.http://dx.doi.org/10.1016/j.robot.
[9] Wu M, Pen G, Zhang T, et al. Design and Optimal Research of a Non-Contact Adjustable Magnetic Adhesion Mechanism for a Wall-Climbing Welding Robot[J], International Journal of Advanced Robotic Systems,2013, 10 (63):1-9.
[10] Schoeneich P, et al. TRIPILLAR: a miniature magnetic caterpillar climbing robot with plane transition ability[J]. Robotica,2011, 29: 1075-1081.
[11] Balaguer C, Giménez A, Abderrahim M. ROMA Robots for Inspection of Steel Based Infrastructures[J], Industrial Robot,2002, 29(3):246-251.
[12] Xiao J, Sadegh A, Elliott M, et al. Design of Mobile Robots with Wall Climbing Capability[C], In proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics Monterey, California, USA, 2005.
[13] Prahlad H, Pelrine R, Stanford S,et al. Electroadhesive Robots—Wall Climbing Robots Enabled by a Novel, Robust, and Electrically Controllable Adhesion Technology[C]. In proceedings of 2008 IEEE International Conference onRobotics and Automation Pasadena, CA, USA, 2008.
[14] Kim S, Spenko M, Trujillo S, et al. Smooth Vertical Surface Climbing With Directional Adhesion[J]. IEEE Transactions on Robotics, 2008, 24(1).
[15] Eich M,Vogele T. Design and Control of a Lightweight Magnetic Climbing Robot for Vessel Inspection[C]. In proceedings of the 19th Mediterranean Conference on Control and Automation, Aquis Corfu Holiday Palace, Corfu, Greece, 2011:1200-1205.
[16] Ig Mo Koo, et al. Development of Wall Climbing Robot System by Using Impeller Type Adhesion Mechanism[J]. Journey of Intelligent Robot System, 2013-02-24.
[17] Gao Xueshan, et al. Strong Magnetic Units for a Wind Power Tower Inspection and Maintenance Robot[J] International Journal of Advanced Robotic Systems,2012, 9(189):1-9.
[18] Longo D,Muscato G.The Alicia3 climbing robot- A Three-Module Robot for Automatic Wall Inspection[J]. IEEE Robotics and Automation Magazine , 2006:42-50.
[19] 桂仲成,陈强,孙振国,等.多体柔性永磁吸附爬壁机器人[J].机械工程学报, 2008,44:177-82.
[20] Lee W, et al. Gunryu III: reconfigurable magnetic wall-climbing robot for decommissioning of nuclear reactor[J], Advanced Robotics,2013, 27(14): 1099-1111.