改进的永磁直线同步电机直接推力控制*
2016-01-22王丽梅程兴民
王丽梅,程兴民
(沈阳工业大学 电气工程学院,沈阳 110870)
改进的永磁直线同步电机直接推力控制*
王丽梅,程兴民
(沈阳工业大学 电气工程学院,沈阳110870)
摘要:针对传统直接推力控制系统响应慢和脉动大的问题,提出一种改进无传感器永磁直线同步电机直接推力控制方法,在定子磁链坐标系下建立电机模型,对推力和磁链进行解耦控制。根据推力和负载角的线性关系设计推力调节回路,将推力和磁链的误差作为PI控制器的输入,利用定子磁链矢量角把产生的正交参考电压分量进一步转化到固定参考系下,采用空间矢量调制代替传统的开关表生成所需的电压矢量。磁链负载角和动子速度由磁链的正交分量计算得出,不使用任何传感器。仿真结果表明,改进的直接推力控制可以得到快速、平滑的推力和磁链响应,提高了系统的控制性能,同时验证了无传感器方法的有效性。
关键词:永磁直线同步电机;直接推力控制;无传感器;SVPWM;脉动
0引言
永磁直线同步电机(PMLSM)在工业自动化、能源的开发、利用过程中的作用日益显著,建立一个系统稳定性好,鲁棒性强的永磁直线同步电机控制机制已至关重要。直接推力控制因其在控制性能上的优越性成为研究热点。
许多文献提出了永磁直线同步电机直接推力控制方案。在文献[1]中提出一个永磁直线同步电机带有速度传感器的直接推力控制(DTC)的方案。该方案是基于经典的直接转矩控制的概念。在文献[2]中给出了一种实用的经典直接推力控制。经典的直接推力控制是通过利用磁链和推力滞环控制和可变开关频率实现的,主要缺点是引起较大的推力脉动。
永磁直线同步电机推力脉动明显降低了系统的控制性能[3]。文献[4]将直接推力控制引入到永磁直线同步电机控制中,使系统具有了良好的控制性能,改善了系统的稳定性;文献[5]中给出的带有速度传感器的直接推力控制仿真,利用空间矢量调制实现了恒定的开关频率;文献[6]给出了永磁直线同步电机基于模糊逻辑的无传感器直接推力控制仿真,在一定程度上改善了推力和磁链的脉动问题,提高了系统效率;文献[7]和文献[8]提出了基于反电动势估计的永磁直线同步电机无传感器控制方法。以上所提出的控制方案虽然在一定程度上改善了直接推力控制的性能,但仍然存在诸多问题,对推力和磁链脉动现象的改善不够彻底,鲁棒性差,没有有效地消除参数变化和外界扰动对控制系统控制性能的影响。
在此提出了一种改进的永磁直线同步电机无传感器直接推力控制方法。在提出的控制方案中,用两个PI控制器代替传统的滞环控制器来控制推力和磁链,在定子磁链坐标系下通过两个独立的控制环对推力和磁链进行解耦控制。推力调节回路是利用推力与负载角的线性关系构成的。推力和磁链的参考值与估计值的误差输入到两个PI控制器中产生在定子磁链坐标系下的电压命令,然后通过空间电压矢量调制(SVPWM)模块,在恒定的开关频率下产生参考电压矢量,定子磁链估计的准确性通过改进的磁链估计方法得到解决。有效地减少了系统的推力和磁链脉动,并且能够得到快速、平滑的推力和磁链响应。
1PMLSM定子磁链x-y坐标系下改进数学模型
永磁直线同步电机定子和动子混合参考坐标系以及各坐标系之间的关系如图1所示。
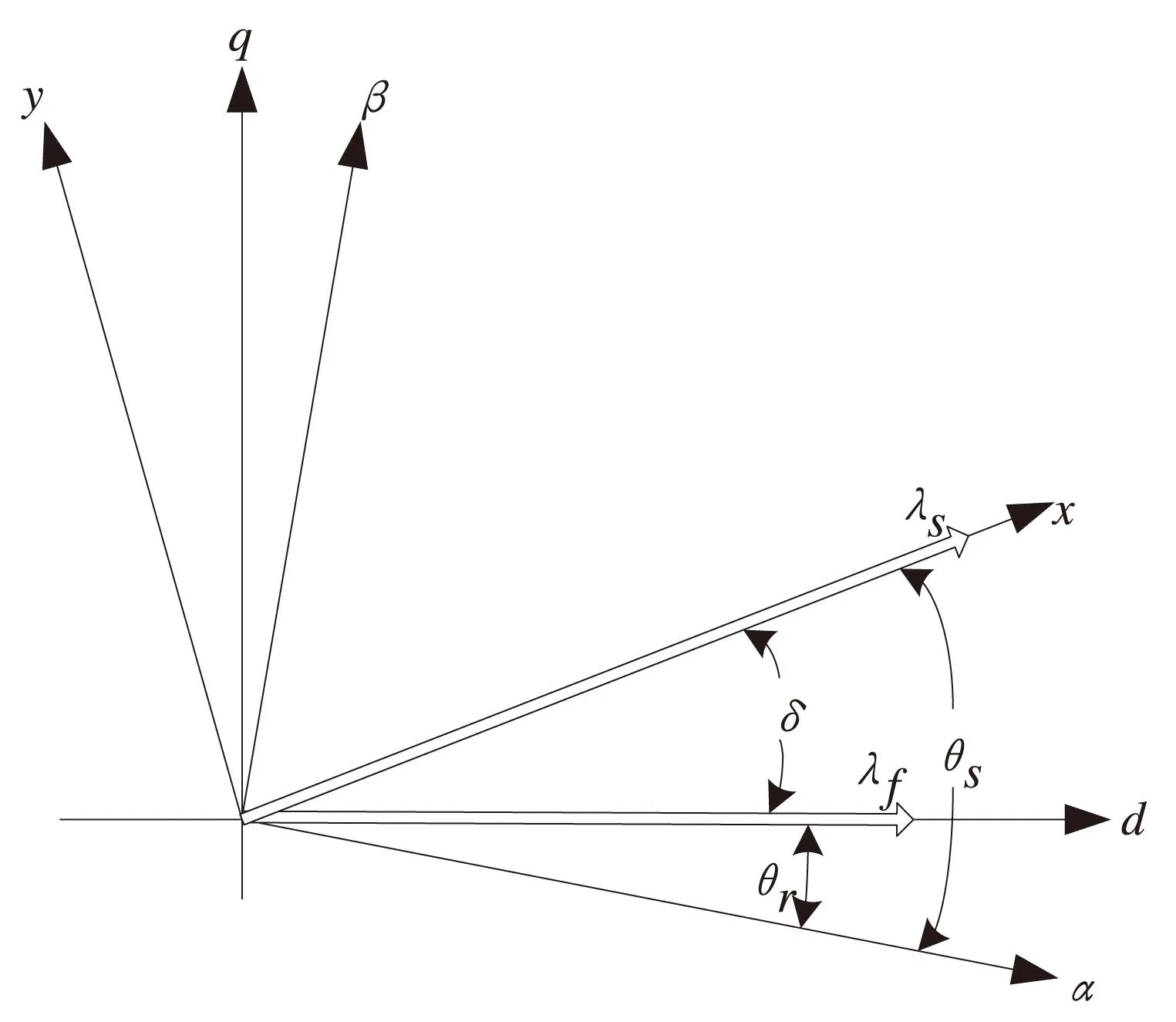
图1 在不同的参考系下的定子和转子磁链
永磁直线同步电机在d-q坐标系下的数学模型表示为[9]:
(1)
(2)
(3)
PMLSM的机械运动方程:
(4)
其中,ud,uq,id,iq,λd,λq,Ld,Lq分别为dq轴上的电压,电流,磁链和电感。Rs是定子电阻,λf是永磁体磁链,FT是电磁推力,P是极对数,vm是动子线速度,τ是极距,M是动子质量,B是摩擦系数。
转子磁链d-q坐标系转化到定子磁链x-y坐标系的park变换[10]如式(5)所示:
(5)
其中δ是负载角,F可以是电压、电流或者是磁链。
(6)
(7)
其中ωs是定子磁链角速度。又定子磁链方向与x轴重合,故λx=λs,λy=0,整理式(6)、(7)得:
(8)
(9)
(10)
由式(10)可知,在定子磁链保持不变的情况下,推力的大小与定子电流在y轴的分量成正比。
由式(9)和(10)得:
(11)
式(8)和式(11)是对推力和磁链进行解耦控制的基础。由式(8)可知,定子磁链可以由电压的x轴分量ux控制。
永磁直线同步电机推力FT与负载角δ的关系表达式为[11]:
(12)
由于推力受最大值限制,推力与负载角在一定的范围内近似为线性关系。在通常情况下,假定定子磁链的幅值|λs|是恒定的,推力FT和负载角δ的线性关系为:
(13)
令K=β|λs|为线性常数。
由式(9)转换得到iy代入式(10)得:
(14)
由图1可知δ=θs-θr,从式(13)可得:
(15)
整理式(14)和(15)可得:
(16)
其中,ξ=3πP|λs|/(2τRs),由式(8)和(16)可得新的状态空间模型:

(17)
⟹Rank(Pc)=2
因此,式(17)提出的系统是完全可控的。
整理得:
(18)
(19)
在式(18)中将电阻压降Rsix(s)视为扰动,则其给出的定子磁链调节回路如图2所示。
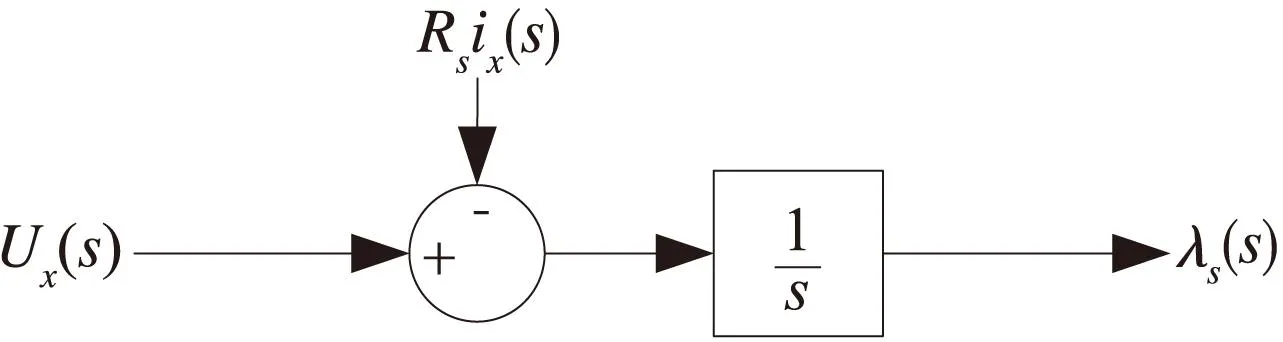
图2 磁链估计模块
将|λs|ωr作为扰动,根据式(19)得推力调节回路如图3所示。
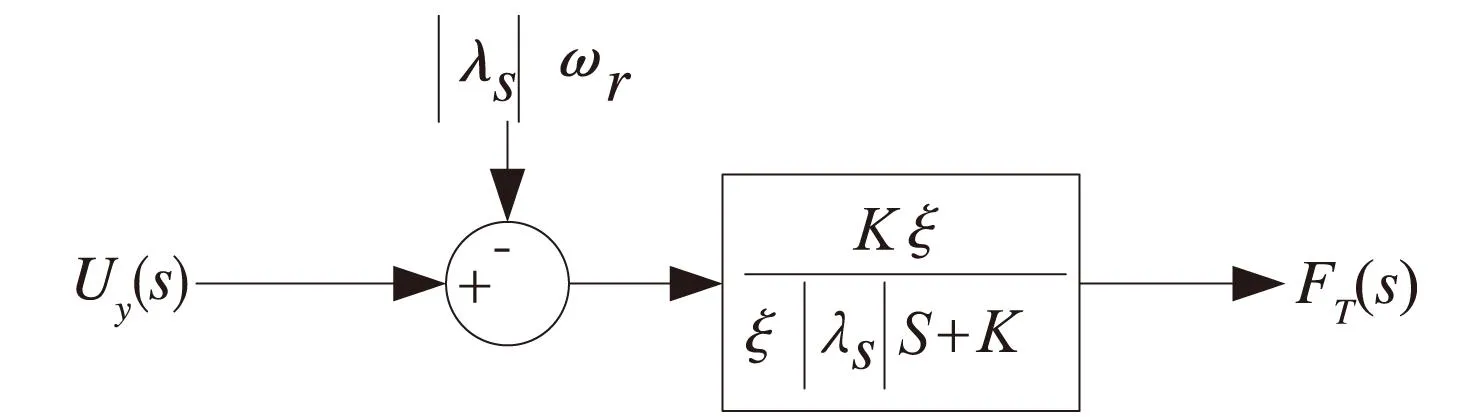
图3 推力估计模块
推力调节回路如图3所示,支配着永磁直线同步电机的动态运行。由于推力与负载角之间的关系并不是绝对的线性关系,因此,常数K的值要取决于是恒定常数的λs,但这不影响推力调节回路的性能。
2PMLSM直接推力控制方案

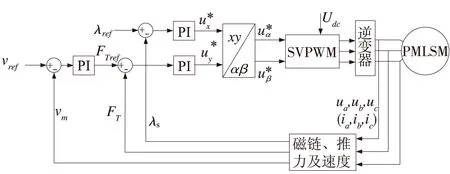
图4 基于新的状态空间模型的改进直接推力控制框图
(20)
(21)
其中,λα和λβ是定子磁链在静止坐标系(α-β)下的正交分量。定子磁链的幅值在静止坐标系(α-β)下表示为:
(22)

2.1定子磁链控制回路设计
磁链控制回路是由图2所示的磁链调节回路级联一个PI控制器构成的,如图5所示。在PI控制器的输出加入Rsix(s)构成对磁链的解耦控制回路,PI控制器的传递函数为:
(23)
为了解决由数模转换带来的信号延迟,在控制回路中加入时间延迟环节e-sT,如图5所示。如果采样时间T足够小。时间延迟可近似为:
(24)
忽略扰动,由图5,式(23),式(24)得,磁链调节回路的闭环传递函数为:
(25)
其中,Kp-λ,Ki-λ为磁链PI控制器参数。
为了获得更好的控制性能,文中磁链PI控制器的参数是通过系统在线调试获得的。
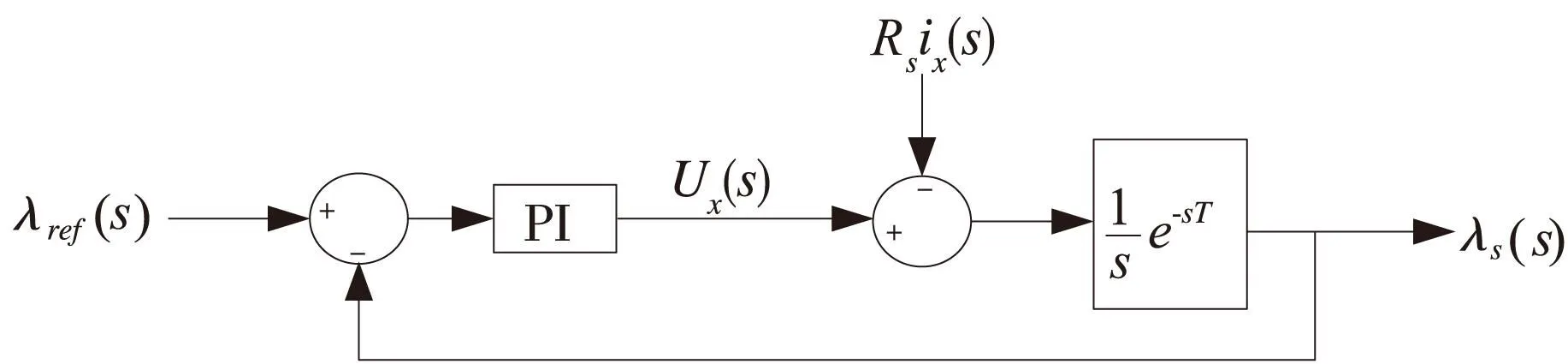
图5 级联PI控制器的磁链控制回路
2.2推力控制回路设计
推力控制回路是由图3所示的推力调节回路级联PI控制器构成的,如图6所示,控制回路的传递函数为:
(26)
Kp-F,Ki-F为推力PI控制器参数。
同样,为了获得更好的控制性能,文中推力PI控制器的参数是通过系统在线调试获得的。
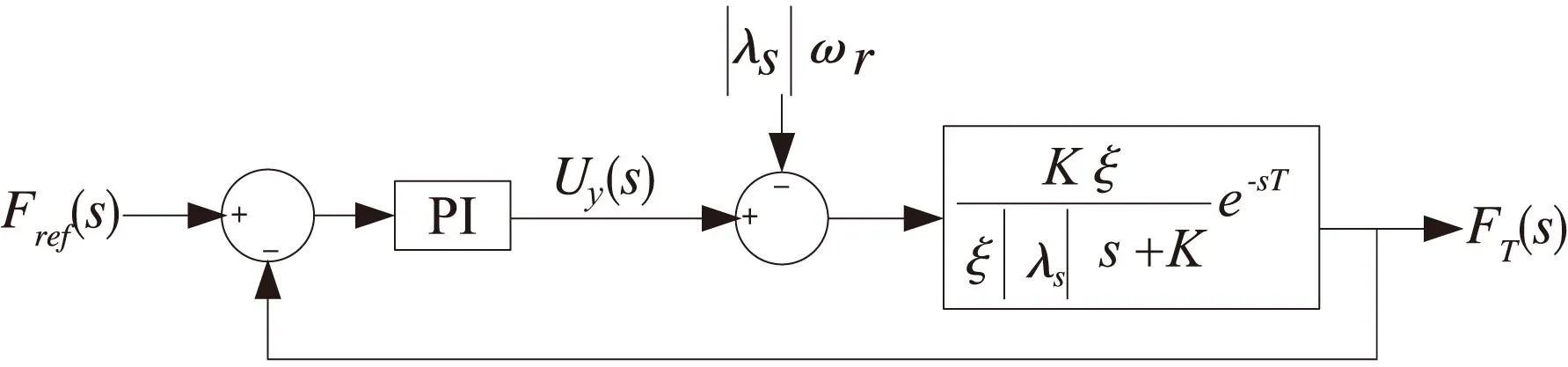
图6 级联PI控制器的推力控制回路
2.3速度控制回路设计
在推力控制回路之外再级联一个PI控制器构成速度控制回路,如图7所示。该PI控制器产生推力参考指令。控制器的增益是通过在线调试获得的。
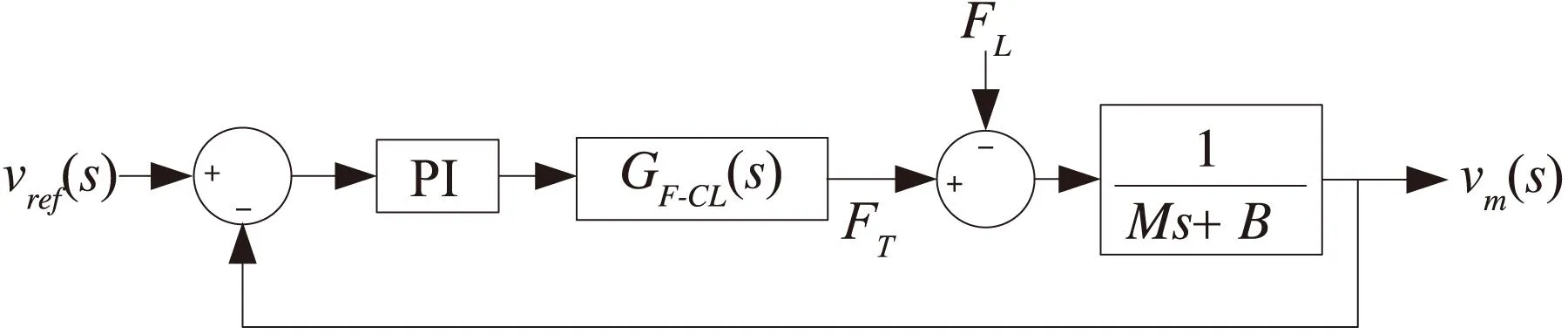
图7 级联PI控制器的速度控制回路
3仿真结果分析
在MATLAB/Simulink环境下搭建永磁直线同步电机直接推力控制系统仿真模型对所提出的控制方案进行仿真验证。在仿真过程中所用到的具体的电机参数为:极对数P=3,定子电阻Rs=3.15Ω,d轴电感Ld=0.0041H,q轴电感Lq=0.0067H,参考速度v=0.44m/s,参考磁链λref=0.101Wb永磁体磁链λf=0.095Wb,极距τ=52.7mm,摩擦系数B=0.001N·s/m,动子质量M=6kg。
将λs=0.0095Wb作为定子磁链参考值,此时线性常数K=687.21。给出磁链,推力和速度PI控制器的比例和积分参数的值为:
磁链PI控制器:Kp-λ=10,Ki-λ=20,Kb-λ=1;
推力PI控制器:Kp-F=1.8,Ki-F=1.5,Kb-F=1;
速度PI控制器:Kp-v=2,Ki-v=0.001,Kb-v=1。
以上所有数值都是通过在线调试所得,Kp-λ,Kp-F和Kp-v是三个PI控制器的抗饱和系数。
定子磁链αβ轴分量轨迹如图8所示,电机在启动后由空载逐渐改变负载的过程中,定子磁链的运动轨迹接近圆形,因此可知计算定子相位角θs的准确性。同时,准确的计算θs对于计算动子磁链角θr至关重要。
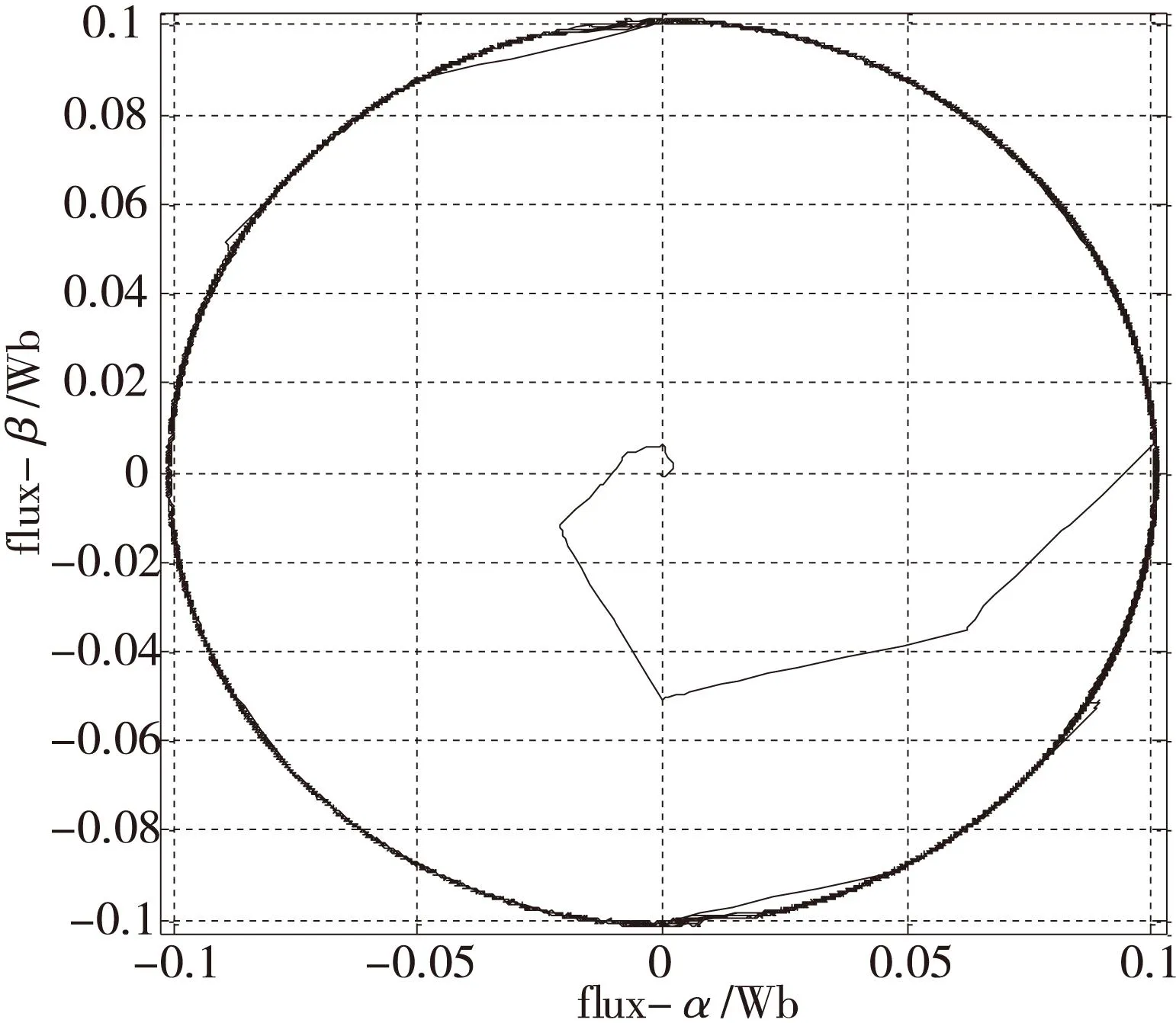
图8 定子磁链轨迹
图9和图10分别给出了使用新的状态模型系统的推力响应和速度响应曲线。给定负载100N,电机以约450N的推力启动后,系统约在0.016s进入稳态,速度达到给定值0.44m/s,在t=0.3s时,给系统突加一个300N的负载,系统在0.005s后,即0.305s趋于稳态并达到负载值400N;在t=0.7s时将负载变为200N,如图9所示,控制系统的推力响应在0.0035s内达到负载值300N并趋于稳定。在t=0.3s时,给系统突加一个300N的负载,在t=0.7s时将给定负载变为200N,由此可以看出系统具有快速响应能力。
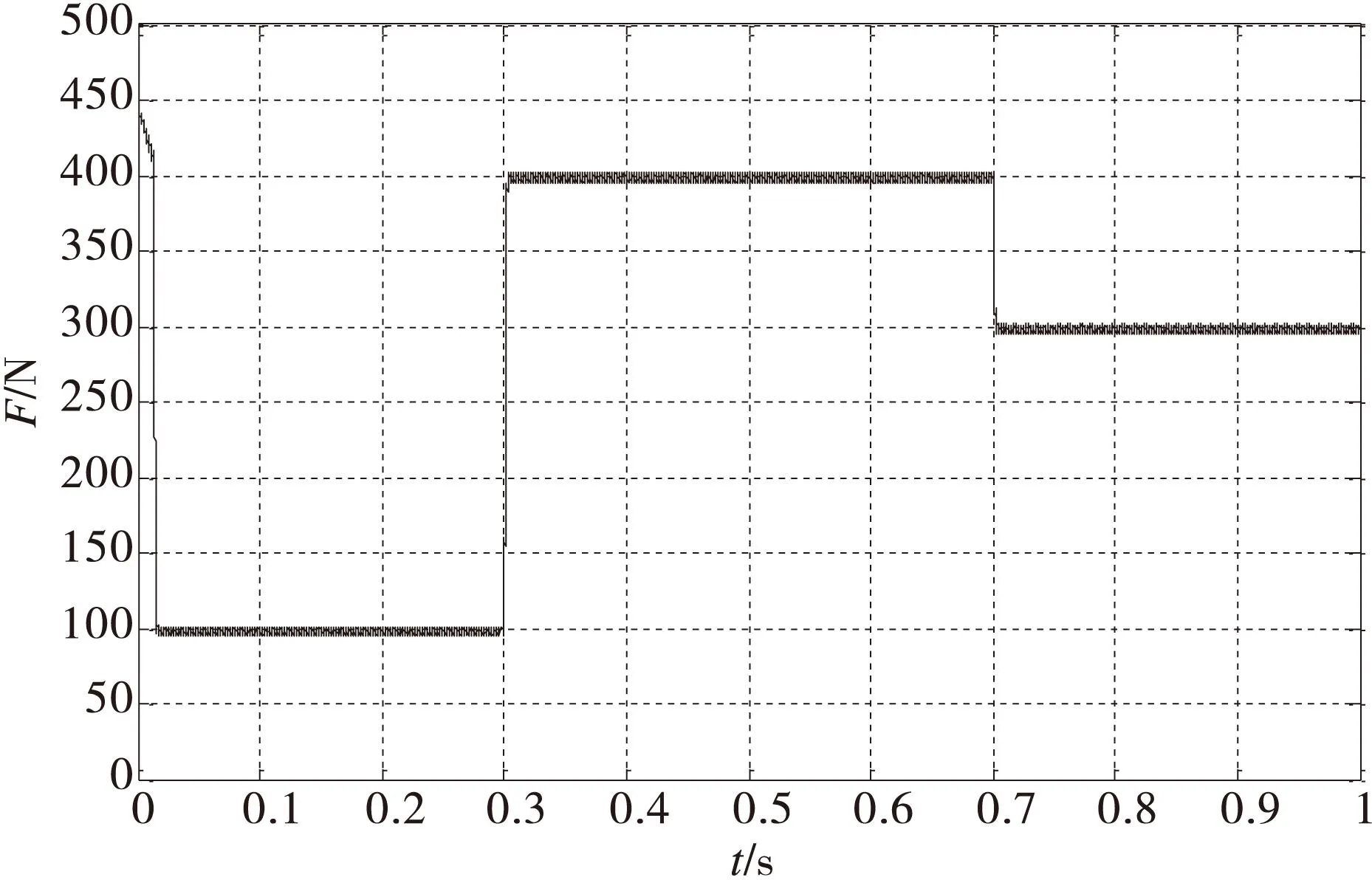
图9 新状态模型下的系统推力响应
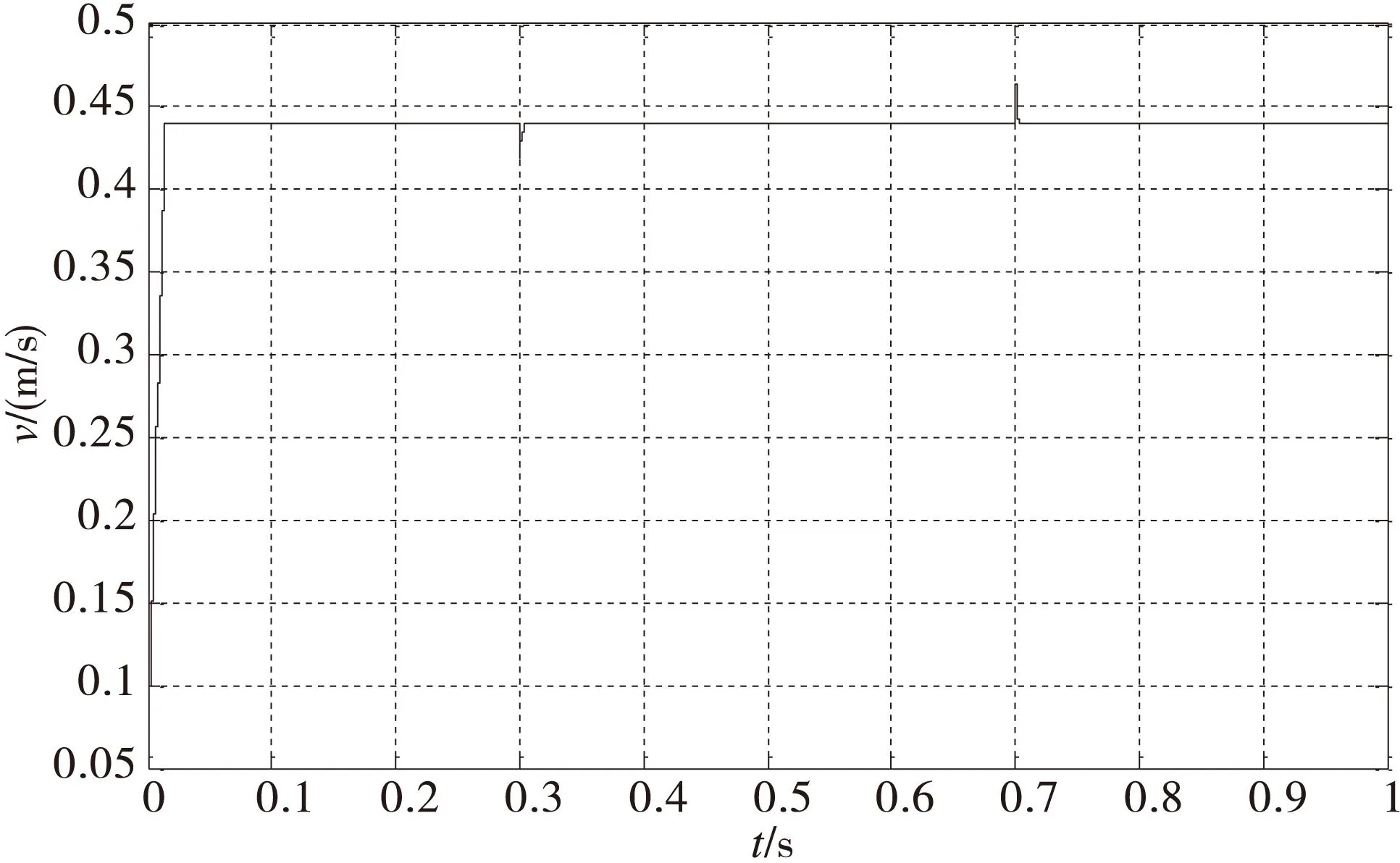
图10 速度响应
图11和图12分别给出了在使用新的状态模型时的推力响应局部放大曲线和传统电机模型下的推力响应局部放大曲线。由图中可以看出相对于使用dq坐标系下的传统电机模型的推力变化范围388N~410N,改进的控制系统推力响应变化范围是395N~401N,可见系统推力脉动得到有效抑制。
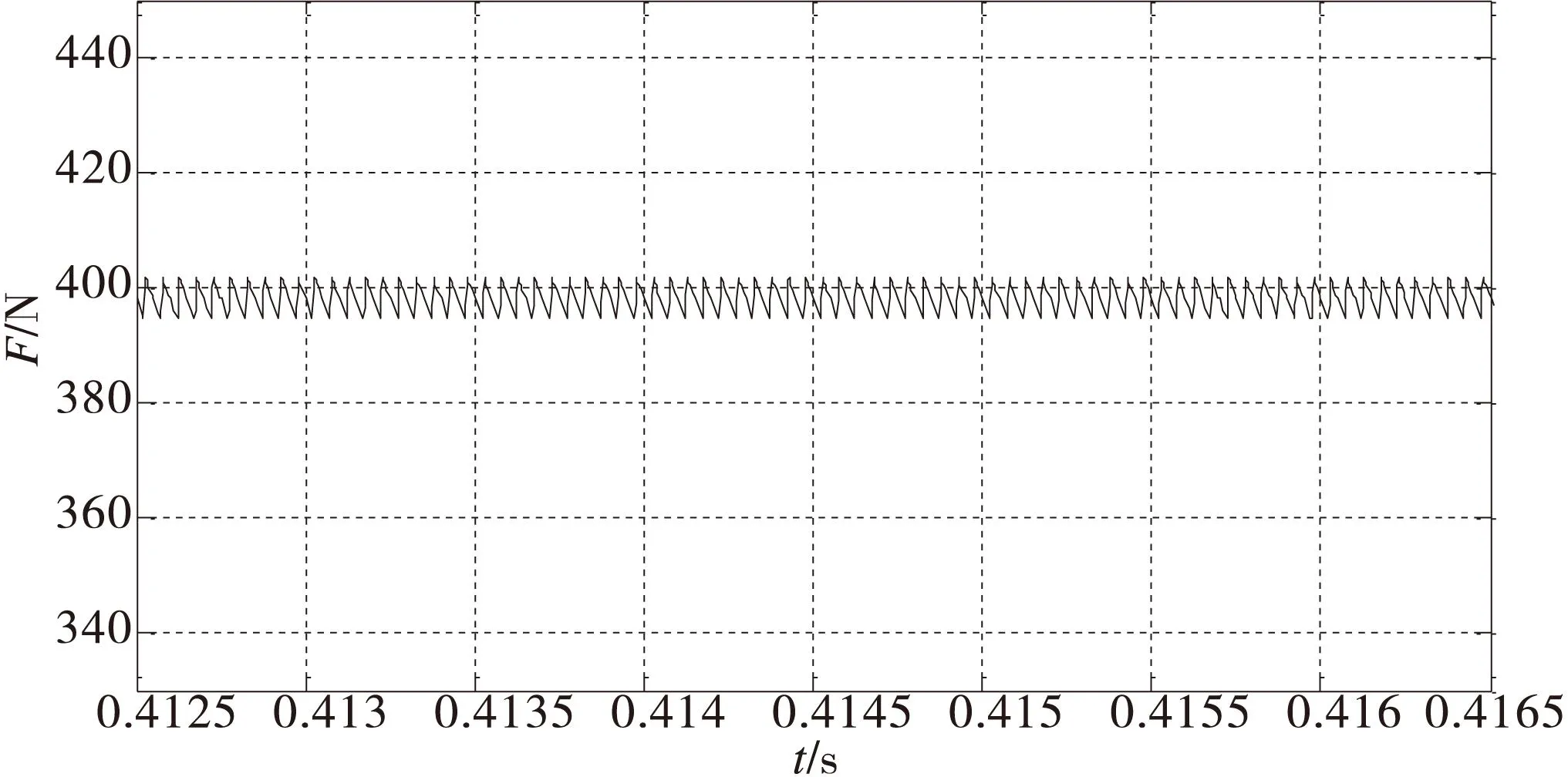
图11 新状态模型下的系统推力响应局部放大
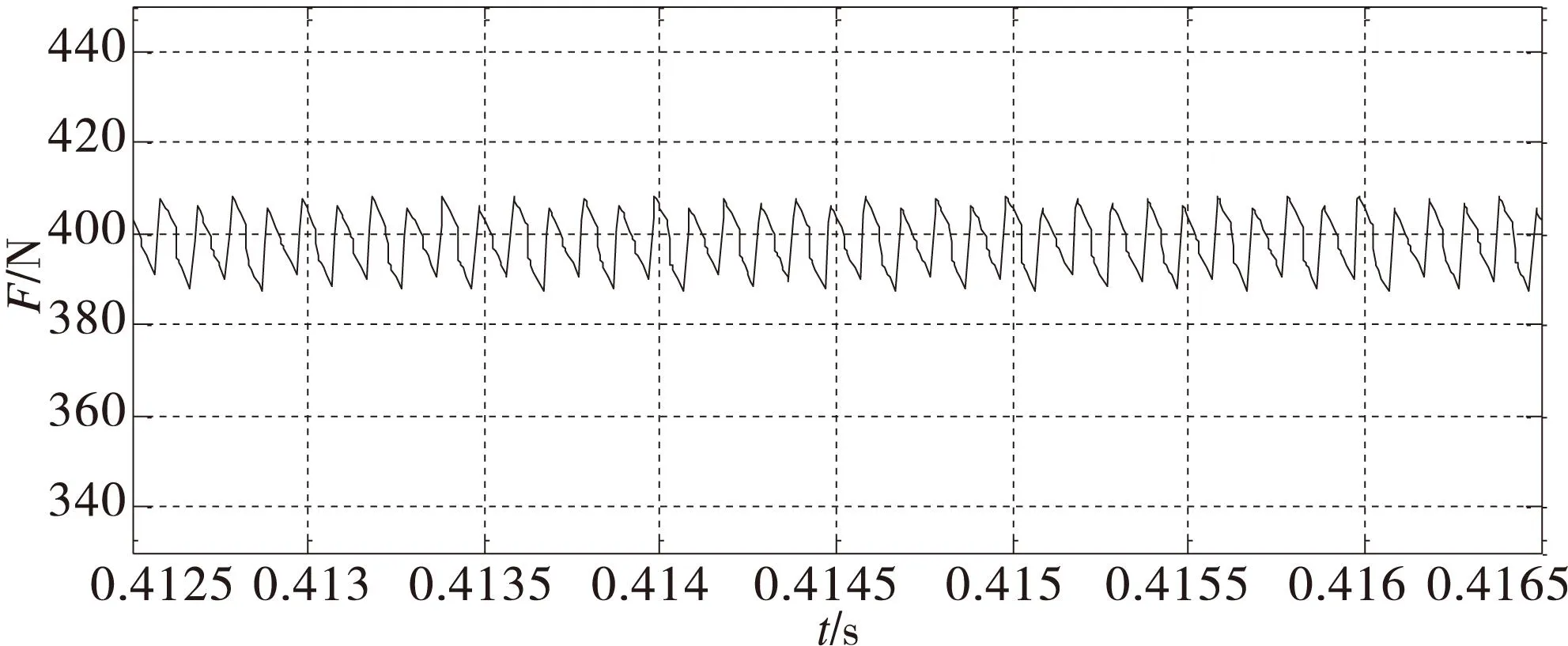
图12 传统直接推力控制系统推力响应局部放大
图13给出的是系统定子磁链响应。由图可得磁链幅值稳定在给定值0.101Wb处,由此可见,系统具有更好的跟踪性能。图14给出磁链响应局部放大曲线,图中显示在0.0015s内磁链变化值约为0.00017Wb,显示出系统较好的抑制磁链脉动性能。由此可知,系统获得良好的磁链响应,表明了系统的控制性能的优越性。
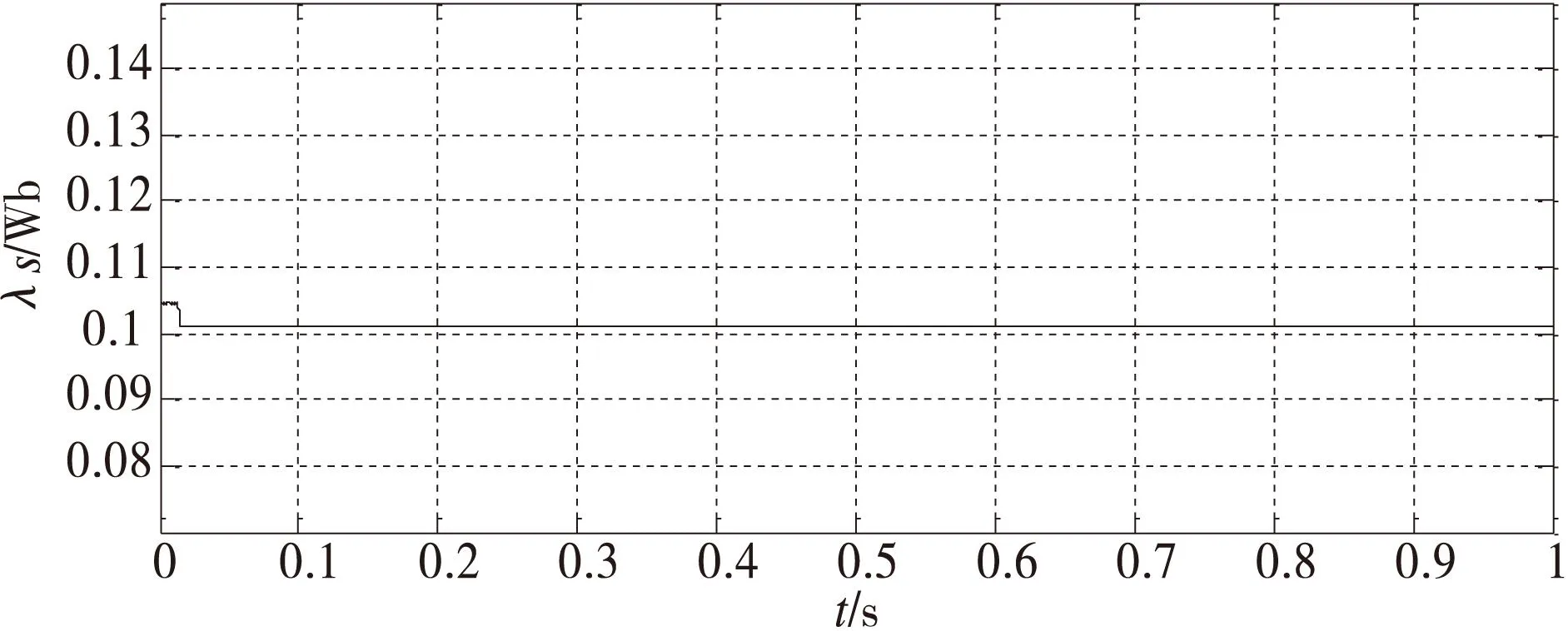
图13 定子磁链响应
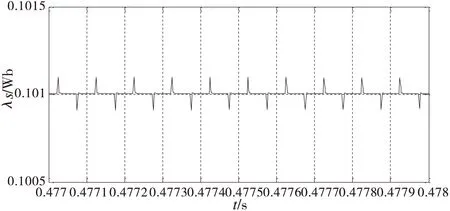
图14 定子磁链响应局部放大
4结论
文中提出了永磁直线同步电机改进的直接推力控
制方案,建立了新的电机模型,在此基础上设计了磁链、推力和速度控制回路,在MATLAB/Simulink环境下搭建系统仿真模型,在负载值变化的情况下对控制系统的性能进行了验证。仿真结果证明了所提控制方案的有效性:系统对负载变化反应灵敏,获得较快的推力和磁链响应;有效地削弱了推力和磁链脉动,系统性能得到显著提高。
[参考文献]
[1] Abroshan M, Malekian K, Milimonfared J, et al. An optimal direct thrust force control for interior permanent magnet linear synchronous motors incorporating field weakening[C]//Power Electronics, Electrical Drives, Automation and Motion, 2008. SPEEDAM 2008. International Symposium on. IEEE, 2008: 130-135.
[2] Sung C C, Huang Y S. Based on direct thrust control for linear synchronous motor systems[J]. Industrial Electronics, IEEE Transactions on, 2009, 56(5): 1629-1639.
[3] Zhu Y, Cho Y H. Thrust ripples suppression of permanent magnet linear synchronous motor[J]. Magnetics, IEEE Transactions on, 2007, 43(6): 2537-2539.
[4] 王海星, 封海潮, 司纪凯. PMLSM 直接推力控制系统研究[J]. 微电机, 2012, 45(5): 26-30.
[5] Mohammadpour A, Parsa L. SVM-based direct thrust control of permanent magnet linear synchronous motor with reduced force ripple[C]//Industrial Electronics (ISIE), 2011 IEEE International Symposium on. IEEE, 2011: 756-760.
[6] 王华, 邹积浩. 基于模糊逻辑的直线永磁同步电机直接推力控制[J]. 电子器件, 2008,30 (6):2280-2283.
[7] Leidhold R, Mutschler P. Speed sensorless control of a long-stator linear synchronous-motor arranged by multiple sections[C]//Industrial Electronics Society, 2005. IECON 2005. 31st Annual Conference of IEEE. IEEE, 2005.
[8] Leidhold R, Mutschler P. Sensorless position-control method based on magnetic saliencies for a Long-Stator Linear Synchr -onous-Motor [C]//IEEE Industrial Electronics, IECON 2006-32nd Annual Conference on. IEEE, 2006: 781-786.
[9] 郭庆鼎, 王成元, 周美文,等.直线交流伺服系统的精密控制技术[M].北京:机械工业出版社,2000.
[10] 王成元, 夏加宽, 孙宜标. 现代电机控制技术[M]. 北京:机械工业出版社, 2009.
[11] 赵丽君, 崔皆凡, 王成元. 永磁直线同步电动机直接推力控制系统研究[J]. 沈阳工业大学学报, 2005, 27(3): 284-287.
[12] Beng G F H. Sensorless Direct Torque and flux control of interior permanent magnet synchronous motors at very low speeds including standstill[J]. University of New South Wales, School of Electrical Engineering and Telecommunications August, 2010.
(编辑赵蓉)
Improved Permanent Magnet Linear Synchronous Motor Direct Thrust Control
WANG Li-mei, CHENG Xing-min
(School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870, China)
Abstract:Aiming at the slow response and ripple problem of traditional direct thrust control system, the paper presents an improved direct thrust control method of permanent magnet linear motor without rotor position and speed sensor. Establishing the motor model in the stator flux frame, decoupling control of thrust and flux linkage. Taking advantage of the linear relationship between the thrust and the load angle designing thrust control loop. Errors of thrust and flux as the PI controller input,to generate orthogonal reference voltage component and then making use of the stator flux linkage vector angle transforming them to a fixed reference frame, and the required voltage vector can be gotten from the space vector modulation instead of traditional switch table. Load angle and rotor flux velocity calculated from the orthogonal component of stator flux, do not use any position or speed sensor. The simulation results show that, improved direct thrust control can get a quick, smooth thrust and flux response, and the control performance of the system improved significantly. At the same time also proved to be effective without position and speed sensor method.
Key words:permanent magnet linear synchronous motor;direct thrust control; sensorless;SVPWM;ripple
中图分类号:TH166;TG68
文献标识码:A
作者简介:王丽梅(1969—),女,辽宁建平人,沈阳工业大学教授,博士生导师,研究方向为交流伺服驱动技术,(E-mail)wanglm@sut.edu.cn。
*基金项目:国家自然科学基金资助项目(51175349);辽宁省高等学校优秀人才支持计划资助(LR2013006);沈阳市科技计划项目(F13-316-1-48)
收稿日期:2015-02-03
文章编号:1001-2265(2015)12-0060-05
DOI:10.13462/j.cnki.mmtamt.2015.12.017