舰船浮筏混合隔振系统建模及约束输出控制策略
2016-01-15杨明月,孙玲玲,王晓乐
第一作者杨明月女,硕士生,1989年4月生
通信作者孙玲玲女,博士,教授,1967年12月生
舰船浮筏混合隔振系统建模及约束输出控制策略
杨明月,孙玲玲,王晓乐
(山东大学高效洁净机械制造教育部重点实验室,济南250061)
摘要:针对舰船内部动力机组浮筏系统低频隔振效果不佳的问题,提出有源前馈控制解决方案。建立由多向扰动振源、分布参数主被动一体式隔振器、中间柔性筏体及弹性安装基础组成的浮筏混合隔振系统结构声传递广义数理模型。基于导纳矩阵理论,定量考虑实际作动器输出的阈值限制,给出浮筏混合隔振系统动态传递特性统一数学模型。从声振能传递与控制角度揭示系统耦合振动机理并给出浮筏系统隔振设计遵循准则。研究表明,力矩激励在浮筏隔振系统能量传输中扮演重要角色,应尽量减少力矩扰动所致能量注入;中间筏体结构柔性及与隔振器内共振的耦合交互作用使中高频段系统隔振性能恶化;全主动控制策略可结合上、下层主动控制策略在低、中高频段的振动控制优势,能实现宽频域内声振能控制最优化。
关键词:振动与波;浮筏;导纳;主动隔振;前馈控制
基金项目:国家自然科学基金(51174126)
收稿日期:2014-07-09修改稿收到日期:2014-09-18
中图分类号:TB53;TB123
文献标志码:A
DOI:10.13465/j.cnki.jvs.2015.20.032
Abstract:In order to improve the low-frequency performance of floating raft systems conventionally used in marine ships, a feedforward active control solution was proposed. An analytical model consisting of complex excitations, distributed parameter isolators, a flexible floating raft and a non-rigid foundation was established. Considering the output threshold of actual actuators, a general mathematic description of the dynamic transfer characteristics of the overall system was given by using the mobility matrix approach. It is shown that moment excitations play an important role in the vibration transfer process. Coupling interactions between the elastic raft and distribution parameter isolators can lead to a deterioration of performance in the high-frequency domain. The upper active control strategy can achieve good effect at rigid-body modal frequencies, and the prominent advantage of the lower active control strategy is mainly reflected in higher frequency band. However, the full active control strategy can realize the optimal control of vibra-acoustic power in broadband domain.
Hybrid floating raft systems with actuator output constraints for marine ships
YANGMing-yue,SUNLing-ling,WANGXiao-le(MOE Key Laboratory of High-efficiency and Clean Mechanical Manufacture, Shandong University, Jinan 250061, China)
Key words:vibration and wave; floating raft systems; mobility; active vibration isolation; feedforward control
随海洋战略地位、舰船声隐性能及驾乘舒适度要求不断提高,动力机械振动噪声控制作为提高舰船隐身能力及改善舱室环境的主要途径颇受各国海军及造船业重视。目前,浮筏隔振技术已广泛用于民用船舶及舰艇柴油动力机组的隔振设计[1]。依靠中间筏体质量的插入损失,浮筏隔振系统可大幅降低中高频段动力设备扰动向安装基础及周围环境的传递。然而,此种隔振方式受制于支承刚度降低与系统稳定性间的相悖关系,对低频振动尤其对引入中间质量后增加刚体共振峰处振动难以有效隔离[2]。有源隔振技术利用外界提供的二次作动力,可满足被动控制技术在低频段无法实现的苛刻隔振要求。
需指出的是,有源隔振技术研究存在:①大多讨论简单的集总参数系统,对分布参数(如柔性连续中间筏体、分布质量隔振器及非刚性安装基础)隔振系统,尤其隔振器分布参数特性导致的各阶内共振对子系统间耦合振动传递特性影响涉及较少[3-6];②多局限于单层隔振系统,对双层(含浮筏系统)及多层隔振系统研究不多[7-11];③多考虑单一垂向自由度激励振源,对其它维度激励如横向力及力矩激励尚欠考虑[12-14];④认为作动器的输出能力无限,忽略实际作动器输出阈值的限制或考虑实际作动器输出阈值限制,未定量明确描述此限制的大小,且缺乏对主动力施加后系统各阶振动模态抑制作用机理探究[15]。
本文针对有源隔振研究中存在的问题,建立由多维复合扰动振源(含横向力、垂向力及力矩激励)、分布参数主被动一体式隔振器、中间柔性筏体及弹性安装基础组成的舰船浮筏混合隔振系统广义数理模型;基于导纳矩阵理论,给出浮筏混合隔振系统动态传递特性的统一数学描述。探究不同维度扰源激励、中间筏体结构柔性及隔振器内共振对系统振动传递特性影响机理。为统一设计、评价准则,以传递到安装基础的总功率流为最优控制价值函数,将作动力矢量及输出阈值上限作为惩罚项定量考虑实际作动器输出约束限制,对比分析复合扰源激励下3种作动器布置方案(上层、下层、全主动控制)隔振效果的优劣程度。
1理论建模
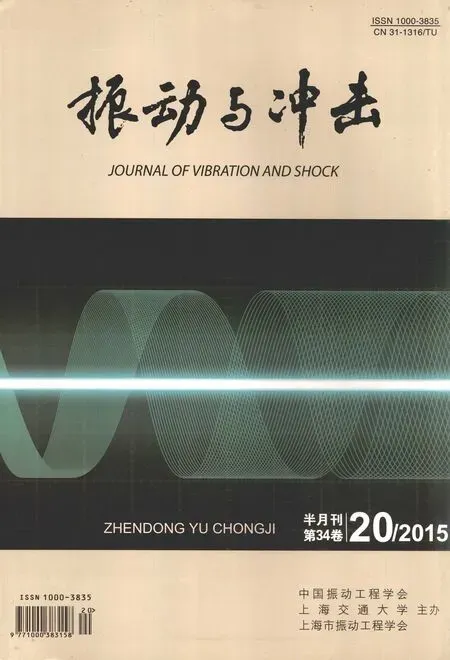
建立舰船动力装置主动浮筏隔振系统分析模型见图1。据动态子结构理论将整体系统沿耦合界面分成机组A、上层隔振支承B、中间筏体C、下层隔振支承D及安装基础E五个子系统。其中机组子系统A含m个机组,每台机组下方安装两组隔振器,全部动力机组连同中间筏体经由下层n个隔振器安装于柔性基础上。为便于分析与综合,各子系统采用局部坐标系(图1)。
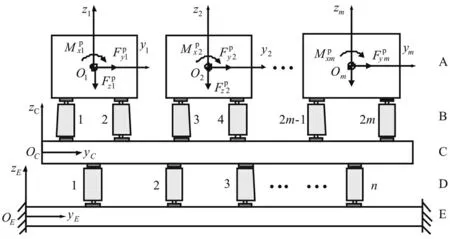
图1 柔性浮筏混合隔振系统模型 Fig.1 Model of a flexible floating raft hybrid isolation system
2子系统分析与综合
2.1机组子系统
据刚体运动学及动力学定律,建立机组子系统动态特性传递方程为
(1)

2.2上、下层隔振器子系统
由于实际作动器上限频率通常小于100 Hz,若实现宽频域(0~1 000 Hz)内满意的隔振效果,多将橡胶隔振器与作动器并联作为支承结构,见图2。作动器主要在低频段(<100 Hz)内工作,且仅提供垂向作动力,而橡胶弹性支承除保证动力机组静安装刚度外亦负责高频域隔振效率。
图2 主被动一体式隔振器模型 Fig.2 Theoretical model for a passive-active integrated isolator
(2)
式中:Mij(i,j=1,2)为两端自由弹性圆杆弯曲及纵向振动原点导纳(i=j)与传递导纳(i≠j)的频响函数[16];Ta为作动器输出力自由度匹配矩阵,见文献[8]。
含2m个隔振器的上层隔振支承子系统动态特性传递矩阵方程为
(3)
同理,含n个隔振器的下层隔振支承子系统动态特性传递矩阵方程为
(4)

2.3中间筏体子系统
受制于现代舰船装备的质量要求,筏体结构朝大型轻质化方向发展,实际筏体已不能视为简单刚体。若计及中间筏体柔性可模化为两端自由边界条件弹性梁,其动态特性可分解为刚体模态及弹性模态两部分。以导纳矩阵形式描述的子系统动态方程为
(5)

(k,l=1,2,…,n+2m)
式中:l为激励点;k为响应点。
2.4基础子系统
充分考虑安装基础柔性,以两端固定弹性梁模拟基础子系统E。其结构振动特性导纳矩阵方程为
(6)

(k,l=1,2,…,n)
式中:l为激励点,k为响应点。ek,l中各导纳元素可由模态叠加法获得(见文献[17])。
2.5子系统动态特性综合
(7)
式中:HAp为机组子系统的传递函数矩阵;HEp,HEa分别为整体隔振系统被、主动通道传递函数矩阵,具体形式为
HAp=H11-H12(E+H22)-1H21
HEp=(E+H22)-1H21,HEa=(E+H22)-1K
式中:
H11=G11-G12(G22+D11)-1G21
H12=G12(G22+D11)-1D12
H21=D21(G22+D11)-1G21
H22=D22-D21(G22+D11)-1D12

L1=D21(G22+D11)-1N;N=C21(C11+F22)-1Q
L2=-D21(G22+D11)-1(D11-D12)TaD+(D21-D22)TaD
Q=(B21-B22)TaB-B21(A22+B11)-1(B11-B12)TaB
G11=F11-F12(C11+F22)-1F21;
G12=F12(C11+F22)-1C12;G21=C21(C11+F22)-1F21;G22=C22-C21(C11+F22)-1C12;
F11=A11-A12(A22+B11)-1A21;
F12=A12(A22+B11)-1B12
F21=B21(A22+B11)-1A21
F22=B22-B21(A22+B11)-1B12。
3约束输出控制策略
输入整体系统及通过上、下层隔振支承及中间筏体传递到安装基础的总功率流分别为
(8)
(9)
式中:上标H表示矩阵(矢量)的共轭转置。
在频域分析中,考虑前馈控制系统多通道传递特性[18],结合式(7)将式(9)写成控制变量形式,即
e=Pd+Gu
(10)
式中:各符号意义及整体隔振系统控制框见图3。

图3 前馈控制隔振系统框图 Fig.3 Block diagram of a feedforward control system
计及工程实际用作动器输出能力上限阈值Wmax,将控制力矢量u作为惩罚项加入最优控制价值函数,即
J=eHe+τ(uHu-Wmax)
(11)
式中:τ为Lagrange惩罚因子,可由选配法获取[19],其取值大小影响作动器输出力大小,进而影响主动控制策略施加后的隔振效果。
将式(9)、(10)代入式(11),并写成标准Hermitain形式,即
J=uHAu+uHb+bHu+c
(12)
式中:
A=0.25[(HEa)H(E+EH)HEa]+τI
由于A为正定矩阵,则式(12)存在全局最小值Jmin,此时对应的最优主动控制力矢量表达式为
uopt=-A-1b
(13)
4数值算例及结果分析
据对主动柔性浮筏隔振系统动态传递特性的理论推导,取实际工程常见两机组浮筏隔振系统进行算例分析,其中每个机组下方安装两组隔振器,中间筏体通过六组隔振器安装在基础上。系统具体结构特征参数见表1。

表1 隔振系统主要结构特征参数
受各机组间安装尺寸限制,工程中较难保证隔振支承相对中间筏体及安装基础对称布置。故表1中取αC=βC=0.48,αE=0.45;κ1=1.2,κ2=0.4;ε1=1.5,ε2=0.9,ε3=0.3。
4.1解析模型有效性验证
在商业有限元软件(ANSYS 12.0)中,建立浮筏被动隔振系统有限元模型见图4。系统主要模态特性分析结果见表2。由表2可知,解析模型计算所得系统各阶模态参数与有限元模型分析结果基本一致。将两动力机组质心受横向、垂向力(幅值均100 N)及绕x轴力矩(幅值100 Nm)激励时,安装基础下层左起第三个隔振支承接点处径向速度响应幅值频谱见图5,可见两条谱线吻合程度亦较好。从而验证所建解析模型传递特性的正确性。

图4 隔振系统有限元模型 Fig.4 FEM model of the isolation system

模态阶数解析解/HzANSYS解/Hz振型12.882.64机组横向24.944.59机组垂向35.485.23机组横摇410.019.78筏体横向513.5613.07筏体垂向614.5314.21筏体横摇751.4951.76基础弯曲1890.1590.67筏体弯曲19142.30141.77基础弯曲210247.41246.44筏体弯曲211278.33276.94基础弯曲312404.22403.57隔振器纵向113461.02456.29基础弯曲414483.85480.74隔振器弯曲115487.24482.28筏体弯曲316680.52680.44基础纵向117688.41677.73基础弯曲518806.52796.78筏体弯曲419807.16806.32隔振器纵向220960.48941.52基础弯曲6
4.2耦合振动机理探究
输入整体系统及通过上、下层隔振支承与中间筏体传递到安装基础的功率流谱(P=10log10(Pi/Pref),i=A,E,参考值取Pref=10-12W;柔性筏体及基础导纳的模态截断均取前20阶) 见图6~图10。其中图6~图8为仅采取被动控制策略情况。
图6中字母a~c尖峰分别为动力机组横向、垂向及横摇刚体振动模态(因算例中两机组质量及转动惯量一致,故此三向模态重合);d~f为尖峰则分别对应中间筏体横向、垂向及横摇刚体振动模态。由图6可知,全频段内仅横向力激励时注入基础的声振能最小,而仅力矩激励时对应的功率流幅值在筏体横摇振动模态 (约15Hz)以上频段内明显高于仅垂向力激励,且在高频段(>100Hz)与复合激励时功率流谱几乎重合。从而表明力矩激励在浮筏隔振系统振动能量传输过程中所起重要作用,将文献[16,20]对单层隔振系统研究结论推广到更复杂的浮筏系统。因此,无论在理论隔振设计及具体工程中均需充分考虑力矩扰动成分产生的影响,安装隔振支承时需确保各机组自身良好的对中性,尽量减少力矩激励导致的能量注入。
等价条件下中间筏体柔性对传递到安装基础功率流谱影响(为突出分析主要矛盾,上、下层隔振支承暂均不考虑分布参数特性) 比较见图7。由图7可知,外扰激励频率高于中间筏体弯曲振动基频(约90Hz)时,筏体的柔性模态便会反映到功率流谱中,其各阶弯曲共振峰(图中箭头所指)使系统隔振效率下降。而对1~20Hz频段内动力机组及筏体结构各阶刚体模态影响甚微。因此,进行低频隔振设计(如确定安装频率)时可近似视筏体为刚体结构;而进行高频域整体系统声学设计(如确定声辐射模态)时,筏体柔性模态影响须计入。


图5 安装基础3#支承点处垂向速度响应幅值谱Fig.5Verticalvelocityofthe3rdjunctionattheinstalledbase图6 不同激励下输入基础的功率流谱Fig.6Inputpowerflowspectrumunderdifferentexcitations图7 中间筏体柔性对输入基础功率流影响Fig.7Influenceofflexibleraftoninputpowerflow
筏体的柔性模态会参与整体系统振动耦合。尤其在高频域,因上、下层隔振器不再符合粗略无质量假设,声振能以弹性波形式在其中传播,且在与中间筏体结合部位因自由度匹配关系不同产生强烈波型转化现象,见图8。图中圆圈内为隔振器三阶内共振峰(两阶纵向、一阶弯曲),其对应的三耦合交互峰分别为404.22Hz、487.24Hz及806.52Hz。其中,404.22Hz处波峰为由隔振器第一阶纵向内共振引起的声振能注入尖峰;487.24Hz、806.52Hz处波峰则分别为中间筏体第三、四阶弯曲振动固有频率,尤其806.52Hz处波峰,其幅值放大效果(约55dB)明显强于487.24Hz处 (约30dB)。此因隔振器内纵向波在筏体耦合接点直接转化为弯曲波传递至筏体结构,且与筏体弯曲振动模态产生叠加,而隔振器内弯曲波主要转化为面内纵向波在筏体结构中传播,故隔振器第二阶纵向内共振导致的筏体弯曲模态峰值放大效果强于第一阶弯曲内共振。由于隔振器内共振(称“驻波效应”)引起的大量声振能注入安装基础,导致基础振动强度加剧,并极易与周围流场介质耦合辐射噪声,因此应采取必要措施削减隔振器驻波效应影响,即采用传递式隔振器,其工作原理及控制效果见文献[21]。
三种作动器布置方案功率流传递谱变化对比见图 9,其中惩罚因子τ=8E-10。由图9可知,在刚体模态频段(1~20 Hz)上层主动控制策略能有效降低机组及中间筏体各阶刚体模态峰值,尤其对垂向及横摇振动模态抑制作用明显;下层主动控制策略突出优势主要体现在中高频段(>20 Hz),较被动控制在各阶共振峰处可达到平均近20 dB的能量消减效果。因此上层主动控制策略在该频段内的隔振效果略优于被动控制措施,所起作用相当于增加系统阻尼,仅在基础共振峰处具有消弱效果。造成此现象原因主要在于上层主动控制策略在中高频段抑制中间筏体质量的作用,无法像下层主动控制策略充分利用中间质量所致高频隔振效率。具体影响机理尚待研究。而全主动控制策略则结合两种控制策略优势,能实现对振动噪声宽频域有效控制。


图8 隔振器内共振对输入基础功率流影响Fig.8InfluenceofIRsofisolatorsoninputpowerflow图9 不同作动器布置方案输入基础的功率流谱Fig.9Inputpowerflowspectrumfordifferentactuatorlayouts图10 不同作动器布置方案对应的输出力谱Fig.10Outputforcesspectrumfordifferentactuatorlayouts
不同控制策略作动器输出见图10,数字为作动器输出力峰值区域,1、3及2、4分别对应动力机组及中间筏体横向及垂向、横摇刚体模态。结合图9发现,三种作动器布置方案对动力机组横向刚体共振峰处能量消减效果不突出,且下层主动控制策略对中间筏体横向刚体模态抑制作用亦不突出,所需作动力约45 N2,仅能提供约20 dB的削减量;而上层及全主动控制策略在作动器提供5 N2输出力条件下获到近40 dB能量削减效果。主要因作动器仅能提供垂向力,对横向(含横摇耦合组分)自由度振动控制能力不足;当作动器内置于下层隔振支承时,其本身所承担的静负载明显大于上层及全主动控制策略。值得指出的是,实际应用的作动器(电磁式、电液式等)上限频率通常低于100 Hz,成为制约主动控制隔振在高频应用的主要因素。因高频段(>100 Hz)内被动控制隔振效果已较理想,具体应用时可附加一组开关控制(Switch on/off)电路,外扰频率超过作动器上限频率时关闭主动控制通道,仅取被动控制措施。
5结论
建立基于导纳矩阵理论的浮筏混合隔振系统结构声传递广义数理模型,并理论推导动态特性传递方程。通过有限元法对所建模型有效性进行验证。以功率流为价值函数对系统耦合振动机理及3种作动器布置方案对隔振效果影响进行阐述与评估。从声振能传递与控制角度给出浮筏系统隔振设计基本准则。研究表明:
(1)力矩激励在浮筏隔振系统能量传输中扮演重要角色,在理论隔振设计及工程实践中均应充分考虑力矩扰动影响,尽量减少力矩激励导致的能量注入。
(2)中间筏体结构柔性及其与隔振器内共振耦合交互作用使中高频段系统隔振性能恶化。除保证筏体结构各阶模态避开隔振器内共振频率外应采取必要措施削减隔振器驻波效应影响。
(3)上层主动控制策略对刚体模态频段的振动控制效果较好;下层主动控制策略可充分利用中间质量带来的高频隔振效率,其突出优势主要体现在中高频段;而全控制策略则可实现宽频域内声振能传递控制最优化。
(4)限于实际作动器仅能提供垂直方向作动力,三种作动器布置方案对动力机组横向刚体共振峰处的能量消减效果不明显。作动器内置于下层隔振支承时不仅本身需承担更大静负载,对中间筏体的横向刚体模态抑制作用亦不突出。
(5)虽以简单一维梁类结构模拟柔性筏体结构、分布质量隔振器及弹性安装基础,但所用分析方法并不受子系统导纳矩阵维度延拓或缩聚限制,可方便推广到板、壳类结构及多维面内外波耦合传播的浮筏隔振系统振动特性研究。因此对结构参数灵敏度分析及最优化设计、主动控制试验台搭建及工程隔振设计均具有一定指导意义。
参考文献
[1]何琳,徐伟. 舰船隔振装置技术及其进展[J].声学学报, 2013, 38(2): 128-136.
HE Lin, XU Wei. Naval vessel machinery mounting technology and its recent advances[J]. Acta Acustica, 2013, 38(2): 128-136.
[2]Hansen C H, Snyder S D, Qiu X J, et al. Active control of noise and vibration, second edition[M]. Boca Raton: CRC Press, 2012.
[3]牛军川,宋孔杰. 船载柴油机浮筏隔振系统的主动控制策略研究[J]. 内燃机学报, 2004, 22(3): 252-256.
NIU Jun-chuan, SONG Kong-jie. Active control strategies of a floating raft isolation system for marine diesel engines[J]. Transactions of CSICE, 2004,22(3): 252-256.
[4]Niu J, Song K, Lim C W. On active vibration isolation of floating raft system[J]. Journal of Sound and Vibration, 2005, 285(1/2): 391-406.
[5]Liu L, Tan K K, Guo Y, et al. Active vibration isolation based on model reference adaptive control[J]. International Journal of Systems Science, 2014, 45(2): 97-108.
[6]Ma X, Jin G, Liu Z. Active structural acoustic control of an elastic cylindrical shell coupled to a two-stage vibration isolation system[J]. International Journal of Mechanical Sciences,2014,79: 182-194.
[7]Pan J, Hansen C H. Active control of power flow from a vibrating rigid body to a flexible panel through two active isolators[J]. Journal of the Acoustical Society of America, 1993, 93(4): 1947-1953.
[8]Gardonio P, Elliott S J, Pinnington R J. Active isolation of structural vibration on a multiple-degree-of-freedom system, Part II: effectiveness of active control strategies[J]. Journal of Sound and Vibration, 1997, 207(1): 95-121.
[9]Liu X, Jin G, Wang Y, et al. Active control of a machine suspension system supported on a cylindrical shell[J]. Journal of Computational Acoustics, 2013, 21(3):1-19.
[10]徐洋,华宏星,张志谊. 舰用主动柔性耦合隔振系统建模研究[J]. 工程力学, 2008, 25(12): 223-228.
XU Yang, HUA Hong-xing, ZHANG Zhi-yi, et al. Study on modeling methodology of naval active flexible coupled isolation system[J]. Engineering Mechanics, 2008,25(12): 223-228.
[11]Sun L, Sun W, Song K, et al. Effectiveness of a passive-active vibration isolation system with actuator constraints[J]. Chinese Journal of Mechanical Engineering, 2014, 27(3):567-574.
[12]Jenkins M D, Nelson P A, Pinnington R J, et al. Active isolation of periodic machinery vibrations[J]. Journal of Sound and Vibration, 1993, 166(1):117-140.
[13]陈斌,李嘉全,邵长星,等. 浮筏多通道协调振动主动控制实验研究[J]. 实验力学, 2008, 23(3): 248-254.
CHEN Bin, LI Jia-quan, SHAO Chang-xing, et al. Experimental study of Multi-channel cooperating active vibration control on floating raft[J]. Journal of Experimental Mechanics, 2008, 23(3): 248-254.
[14]周刘彬,杨铁军,张攀,等. 基于弹性舱段结构的浮筏主动隔振系统实验研究[J]. 振动与冲击, 2013, 32(17): 145-149.
ZHOU Liu-bin, YANG Tie-jun, ZHANG Pan, et al. Tests for an active floating raft vibration isolation system based on a flexible hull structure[J]. Journal of Vibration and Shock, 2013, 32(17): 145-149.
[15]BeijersC. A modeling approach to hybrid isolation of structure-borne sound[D]. Enschede: University of Twente, 2005.
[16]孙玲玲,宋孔杰. 复杂机械系统多维耦合振动传递矩阵分析[J]. 机械工程学报, 2005, 41(4): 38-43.
SUN Ling-ling, SONG Kong-jie. Transmission matrix method for Multi-dimensional vibration analysis of complex mechanical systems[J]. Journal of Mechanical Engineering, 2005, 41(4):38-43.
[17]Fahy F, Walker J. Advanced applications in acoustics, noise and vibration[M]. New York: Spon Press, 2004.
[18]Fuller C R, Elliott S J,Nelson P A. Active control of vibration [M]. London: Academic Press,1997.
[19]Qiu X J, Hansen C H. A study of time-domain FXLMS algorithms with control output constraint[J]. Journal of the Acoustical Society of America, 2001, 109(6): 2815-2823.
[20]Sanderson M A. Vibration isolation: moments and rotations included[J]. Journal of Sound and Vibration, 1996, 198(2):171-191.
[21]Dylejko P G, MacGillivray I R. On the concept of a transmission absorber to suppress internal resonance[J]. Journal of Sound and Vibration, 2014, 333(10):2719-2734.