飞行模拟器操纵加载机构设计及仿真
2015-12-31王辉,莫凡
王 辉,莫 凡
(中国民航大学 航空工程学院,天津 300300)
0 引言
飞行员对飞机飞行动作的操纵主要是通过驾驶室内的操纵机构(主要指操纵杆、方向盘、脚踏板)控制机体上相应的舵面(升降舵、方向舵、副翼)实现的。操纵杆控制升降舵的纵向偏转以控制飞机的俯仰动作;方向盘控制方向舵的横向偏转以控制飞机的偏航动作;脚踏板控制副翼的纵向偏转以控制飞机的横滚动作[1-2]。舵面通过扰动流过其表面的气流来发挥作用,当舵面偏转时,气流会同样给舵面一个反作用力,这个反作用力叫做操纵负荷。操纵负荷的大小主要由空速以及舵面的偏转程度等因素决定,空速越大,舵面偏转程度越大,操纵负荷越大;反之,操纵负荷越小[3]。在飞行模拟器中,操纵加载机构用来提供上述操纵负荷。操纵负荷的逼真度是飞行模拟器飞行训练水平的重要参数之一,对于飞行员的训练质量有重要影响[4]。本文提出了一种新型的直线加载机构,并对其动力学性能进行仿真分析。
1 直线加载机构工作原理
本文所述的直线加载机构如图1所示,操纵机构的动作(操纵杆的偏转、方向盘的转动、脚踏板的踩踏)均可通过相应的运动转化机构转化成直线加载机构中导杆的直线运动。
当驾驶机构的动作导致导杆向左移动时,导杆带动左侧弹簧的右端面,使其压缩,此时左侧弹簧提供操纵负荷。当丝杠螺母机构中螺母位于如图1所示位置时,提供的操纵负荷最小。当需要加大操纵负荷到一定值时,飞行模拟器的控制系统对伺服马达发出指令,使丝杠朝相应方向旋转相应的角位移,带动螺母右移,螺母带动外壳1、外壳2右移,此时外壳1推动左侧弹簧的左端面使其产生相应的形变量,从而使导杆输出的操纵负荷增加到相应值。同理可得导杆右移时机构的运转过程,不再冗述。
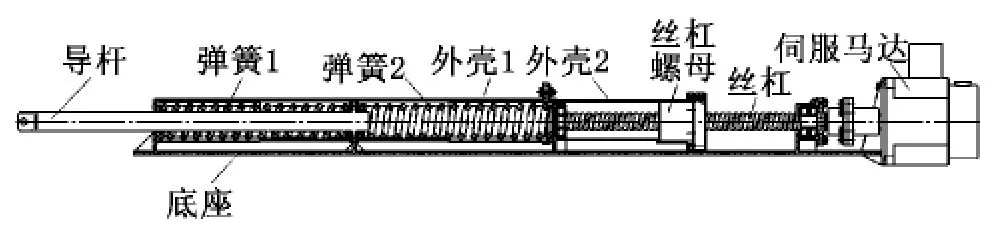
图1 直线加载机构
2 直线加载机构的三维建模
由于飞机操纵过程中,操纵杆前后偏转的力臂较长,故俯仰操纵的动作行程和折算到加载机构上的操纵力是最大的,对加载机构要求最高[5-6],故本文仅以俯仰操纵中该直线加载机构为例对其进行动力学仿真分析。其中各零件尺寸与性能的设计以某型飞行模拟器的操纵特性为依据,其俯仰操纵的主要力学参数如表1所示。

表1 某型飞行模拟器俯仰操纵主要力学参数
在UG 8.0建模环境下,对直线加载机构进行三维建模,并对操纵杆以及相关运动转化机构进行简化,得到的俯仰操纵机构三维模型如图2所示。操纵杆通过一转轴与外界铰连,其一端为手柄端,另一端与一连杆铰接;连杆另一端与加载机构导杆铰接。操纵杆、连杆、导杆构成一种曲柄被限制在小角位移范围内摆动的特殊曲柄滑块机构。操纵杆手柄距转轴的距离为850mm,转轴到连杆端距离为100mm,则操纵杆手柄上的力以近似8.5倍放大后施加于加载机构的导杆上。
3 直线加载机构的动力学仿真
将上述建模结果从UG 8.0建模环境中导入到UG 8.0动力学仿真环境下,对加载机构的动力学特性进行仿真分析。

图2 俯仰操纵机构三维模型
此仿真过程旨在验证运动转化机构和加载机构的运动可行性,故对主动部件(操纵杆)施加力驱动进行仿真,得到相关从动部件的位移和力的结果。在操纵杆手柄上施力,模拟飞行员对操纵杆的动作,使操纵杆朝某一方向偏转一定角度,再回原位。在机构设计阶段,计算确定的弹簧性能参数如表2所示。弹簧初始安置空间尺寸设计确定弹簧的预紧力以保证操纵杆偏转初始时刻的最小操纵负荷10.5N,操纵负荷随操纵杆偏转角度的增大而逐渐增大,故施加在手柄上的力也要逐渐增大。使用STEP函数对施加于操纵杆手柄的力的变化进行驱动,设置STEP函数为:

此设置表示施加在手柄上的操纵力在0时刻为10.5N,之后均匀增加,到1.5s时为98N,此过程操纵杆偏转角度将逐渐增大;施加在手柄上的操纵力自1.5s时之后均匀减小,到3s时减为98-87.5=10.5N,此过程操纵杆偏转角度将逐渐减小直至回归原位。提交系统进行解算,生成运动仿真动画和相关动力学曲线图,如图3、图4所示。

表2 弹簧参数

图3 各标记点的位移—时间曲线

图4 各运动副的力—时间曲线
此过程中,操纵杆最大偏转角为16.34°,可满足设计要求15°的最大偏转;另外,弹簧受到的最大压力为926.7N,符合该尺寸弹簧的选型要求。
4 结论
本文对某种新型飞行模拟器操纵负荷直线加载机构的结构和工作过程进行了介绍,并对其进行了三维建模及动力学仿真分析。在以上动力学仿真过程中,机构运动无干涉和死点,运动曲线平滑,表明此机构在设计上具有运动可行性、合理性,也符合加载机构执行所需功能时的动力学要求。
[1]陈建东.全球民用全飞行模拟器现状[J].民航经济与技术,1998,49(2):51-52.
[2]赵震炎.地面飞行模拟器的现状和发展趋势[J].航空学报,1987,8(10):11451-11458.
[3]王行仁.飞行实时仿真系统及技术[M].北京:北京航空航天大学出版社,1998.
[4]王芳.飞行模拟器操纵负荷系统研究[D].南京:南京航空航天大学,2008:1-4.
[5]王辉.飞行模拟器操纵负荷系统关键技术及原理样机研制[D].天津:天津大学,2006:14-16.
[6]任长伟.飞行模拟器操纵负荷系统机构分析与设计[D].哈尔滨:哈尔滨工业大学,2010:19-21.
