100%低地板有轨电车动力学性能研究
2015-12-31黄运华
陈 雷,黄运华
(西南交通大学 机械工程学院,四川 成都 610031)
0 引言
100%低地板有轨电车自20世纪80年代问世以来,以其低能耗、低污染、方便旅客上下车等优点,在很多国家都得以迅速发展。在中国发展100%低地板有轨电车,对解决中国当前城市交通拥堵、环境污染严重等问题具有积极意义[1]。本文利用SIMPACK多体动力学软件对四模块100%低地板有轨电车进行建模和动力学性能分析。
1 100%低地板有轨电车结构形式
100%低地板有轨电车根据其运量的不同,具有不同的编组形式。本文的研究对象为四模块编组的100%低地板有轨电车,由四节车体组成,两节车为一组,整列车共两组。有轨电车采用单车型结构形式,每一节车体中部正下方都安装有转向架。车辆为三动一拖的编组,其中1、4车为带有司机室的动车,2车为动车,3车为拖车。为了实现100%低地板,车辆全部采用独立旋转车轮转向架,其中动车的独立车轮转向架为纵向耦合形式,以提高车辆直线运行稳定性。车体通过不同的铰接装置使四节车的地板面贯通,整列车的地板面距轨面高为300mm。车辆的最高运行速度为80km/h。
图1为100%低地板有轨电车的铰接编组形式。1、2车为一组,3、4车为一组。组内车与车之间的下部铰接结构采用固定铰,上部采用转动铰,单过道连接,允许车与车绕z轴相对转动,B、G为固定铰,A、F为转动铰,组与组间的上部铰接结构采用纵向拉杆,以传递纵向力,下部采用双铰接结构,前后车体可以分别相对于双铰接装置绕z轴转动。E、D为双铰接结构,C为纵向拉杆。
2 动力学模型的建立
2.1 独立旋转车轮建模
传统轮对的左、右车轮与车轴是作为一个整体压装在一起的,具有相同的绕y轴旋转的角速度,用SIMPACK建模时,只需定义一个刚体,使其具有轮轨接触运动副即可。与传统轮对不同,独立车轮的两侧车轮可以以不同的角速度绕轴桥旋转,在用SIMPACK建模时,首先建立一个刚体模型代表轴桥,定义其具有轮轨接触运动副,与一系悬挂连接,然后建立两个刚体模型分别代表左、右两侧车轮,通过绕y轴旋转的运动约束装配在轴桥两端[2]。

图1 100%低地板有轨电车编组和铰接形式
2.2 转向架建模
转向架的基本组成部分有轴桥轮组、构架,弹性悬挂元件、基础制动装置等,其中轴桥为中部下凹结构以降低地板面高度,弹性悬挂元件包括橡胶簧、螺旋圆簧、横向减振器、垂向减振器等。动力转向架还包括牵引电机和齿轮传动装置。用SIMPACK建模时,首先建立轴桥轮组和构架模型,然后建立一系橡胶簧、二系钢弹簧单元和二系横向、垂向减振器。对于动力转向架建模,还需建立牵引电机和齿轮箱模型,并通过齿轮箱力元将转向架一侧前、后车轮耦合起来[3]。
2.3 车组建模
用SIMPACK建模时,将固定铰处理成x、y、z三个位移方向的大刚度弹簧力元,以限制车与车之间x、y、z三个方向的相对位移;将转动铰处理成x、y方向的大刚度弹簧力元,以传递车体间的纵向力和横向力;将纵向拉杆处理成x方向的大刚度弹簧力元,只传递纵向力[4]。整车动力学模型如图2所示。

图2 整车动力学模型
3 100%低地板有轨电车动力学性能分析
3.1 100%低地板有轨电车稳定性
本文研究的100%低地板有轨电车的动车转向架为纵向耦合独立旋转车轮转向架。相比全独立旋转车轮转向架,将同一侧前、后车轮耦合起来,可以产生纵向蠕滑力,因此纵向耦合独立旋转车轮转向架具有更好的导向性[5]。
本文采用非线性法分析100%低地板有轨电车的稳定性。首先让车组在不平顺的轨道上运行一段距离,然后去除激励,让列车在光滑无激励的轨道上运行,观察其横向位移是否收敛到零线位置。激励采用美国六级谱。图3、图4分别为车组运行速度为228km/h和229km/h时七位轮组的横向位移。从图3、图4可知:车组的运行速度为228km/h时,轮组横向位移经过一段时间振荡后能够回到零线位置;而当车组的运行速度为229km/h时,轮组横向位移已无法回到中心位置,且出现一定程度的小幅振荡。由此可知,车组的蛇行失稳临界速度为228km/h,完全能够满足100%低地板有轨电车80km/h的最高运行速度要求。
3.2 100%低地板有轨电车平稳性
本文的平稳性计算参照GB/T 5599-1985《铁道车辆动力学性能评定和试验鉴定规范》进行。按照此标准规定,当平稳性指标W≤2.50时,车辆的平稳性等级为优;当2.50<W≤2.75时,车辆的平稳性等级为良好。将加速度传感器安装在车体中部,即转向架正上方的车体地板面上,为了全面地反映整列车的舒适性状况,在每节车前、后两端端部的地板面上也安装加速度传感器。仿真时,先让车辆在一定距离的无激励轨道上运行,然后在足够长的不平顺轨道上运行。轨道谱采用美国六级谱。平稳性计算结果见图5~图8和表1。表1中,前端表示车体中部地板面前方4m位置,后端表示车体中部地板面后方4m位置。从图5~图8和表1的计算结果可以看出,100%低地板有轨电车在80km/h的速度范围内,其横向和垂向平稳性指标都小于2.5,平稳性等级达到优秀,满足GB/T 5599-1985的要求。

图3 228km/h速度下七位轮组的横向位移

图4 229km/h速度下七位轮组的横向位移
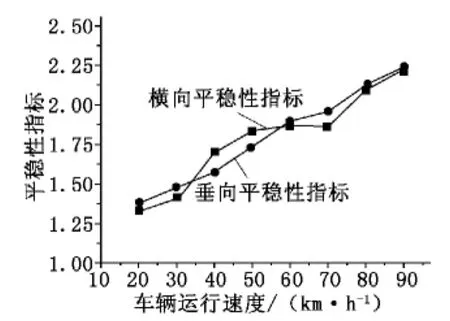
图5 1车地板面中部平稳性指标

图6 2车地板面中部平稳性指标

图7 3车地板面中部平稳性指标
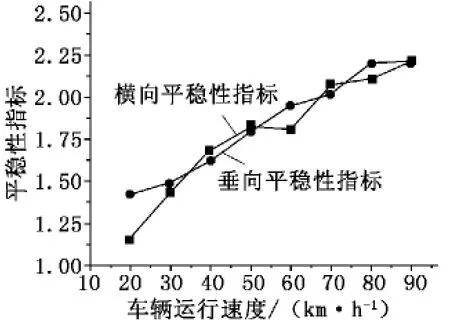
图8 4车地板面中部平稳性指标
3.3 100%低地板有轨电车曲线通过性
100%低地板有轨电车在城市中运行,必须能够安全地通过城市中的小半径曲线。本文的曲线通过性能计算选择了3种不同半径值的圆曲线,分别为25m、36m和50m。各曲线的计算参数见表2。曲线通过速度是按曲线欠超高值为75mm计算得出。仿真时,在轨道上设置美国六级谱不平顺。
根据GB/T 5599-1985计算车辆通过曲线时的脱轨系数、轮对冲角、轮轨横向力和轮重减载率。根据标准规定,脱轨系数不得大于1.0;轮重减载率不得大于0.60;动力转向架和非动力转向架的轮轨横向力目标值分别为29.27kN、28.31kN。经仿真计算,得到各曲线通过性能指标,见表3、表4、表5。

表1 100%低地板有轨电车在不同速度等级下车体端部的平稳性指标

表2 各曲线计算参数

表3 车辆通过25m半径圆曲线时的曲线通过性能指标

表4 车辆通过36m半径圆曲线时的曲线通过性能指标
从表3、表4、表5中可以看出:车组通过小半径曲线时,脱轨系数最大值为0.516,轮轨横向力最大值为19.305kN,轮重减载率最大值为0.474,各曲线通过性能指标均在标准要求的范围以内,说明100%低地板有轨电车具有良好的曲线通过性能,能够安全地通过城市中的小半径曲线。
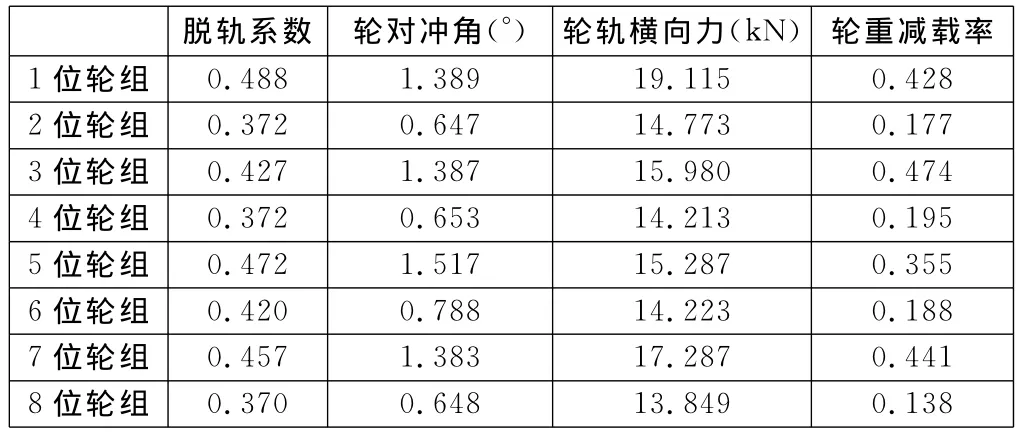
表5 车辆通过50m半径圆曲线时的曲线通过性能指标
4 结论
本文利用SIMPACK多体动力学软件建立了100%低地板有轨电车的动力学模型并进行了动力学性能计算。从计算结果可以得出以下结论:100%低地板有轨电车以80km/h的速度在直线轨道上运行时,具有良好的稳定性和平稳性,能够满足旅客对乘坐舒适度的要求;100%低地板有轨电车可以安全地通过城市中的小半径曲线。
[1]黄运华,傅茂海,卜继玲,等.独立轮对发展及其应用前景[J].电力机车与城轨车辆,2003,26(4):8-11.
[2]罗世辉.大连低地板有轨电车的动力学性能[J].机车电传动,2001(3):28-31.
[3]王欢.100%低地板轻轨车辆结构型式与导向原理研究[D].成都:西南交通大学,2008:10.
[4]李明,戴焕云,丁磊.70%低地板轻轨车建模及动力学分析[J].交通工程运输学报,2004(2):49-52.
[5]黄运华,李芾,傅茂海.独立旋转车轮转向架横向动力学研究[J].西南交通大学学报,2002,37(3):254-259.
