车载导弹海上射击视景仿真研究
2015-12-23李正优,郭留河
【装备理论与装备技术】
车载导弹海上射击视景仿真研究
李正优,郭留河
(装甲兵工程学院 兵器工程系,北京100072)
摘要:视景仿真的逼真性直接影响车载导弹海上射击模拟训练的效果,采用改进的Gerstner模型构建海浪的基本模型,通过快速傅里叶变换解决逼真度与实时性之间的矛盾,采用Creator建立三维模型库,采用OpenGVS类库完成三维视景的仿真驱动,构建了炮长瞄准镜视距模型、激光测距模型和瞄准分划运动模型,实现了瞄准线及分划仿真,采用微分方程构建导弹弹道模型,实现了车载导弹弹道仿真,建立了目标毁伤评估模型,实现了对目标毁伤效果的仿真。实践证明,视景仿真效果逼真。
关键词:导弹;射击;视景;仿真
作者简介:李正优(1980—),男,硕士,讲师,主要从事导弹运用工程研究。
doi:10.11809/scbgxb2015.06.007
中图分类号:E927
文章编号:1006-0707(2015)06-0025-04
本文引用格式:李正优,郭留河.车载导弹海上射击视景仿真研究[J].四川兵工学报,2015(6):25-28.
Citation format:LI Zheng-you, GUO Liu-he.Study on Sea Firing Scene Simulation of Vehicular Missile[J].Journal of Sichuan Ordnance,2015(6):25-28.
Study on Sea Firing Scene Simulation of Vehicular Missile
LI Zheng-you, GUO Liu-he
(Department of Arms Engineering, Academy of Armored Forces Engineering, Beijing 100072, China)
Abstract:Verisimilitude of scene simulation produces an important effect on sea firing training of vehicular missile directly. We built the basic ocean wave model based on improved Gerstner wave and elicits discrete FFT algorithm model to solve contradiction between verisimilitude and real-time, and adopted MultiGen Creator to build 3D scene and used OpenGVS for scene driving, and built aiming sight model, laser ranging model and aiming reticule model and we achieved aiming line and reticule simulation. We adopted differential equation to build missile trajectory model and achieved missile trajectory simulation, and built target damage estimation model and achieved target damage simulation. As the proved application, the result of scene simulation is effective and vivid.
Key words: missile; firing; scene; simulation
车载导弹海上实弹射击受装备、气象、海况等条件限制,难以经常实施,而且海上射击环境复杂多变,影响射击的因素很多,战车始终处于不稳定状态,对射手在影响导弹射击和命中的关键环节如搜索目标、测距、瞄准发射、稳定控制等要求很高,必须进行车载导弹海上射击模拟训练。视景仿真的逼真性将直接影响车载导弹海上射击模拟训练的效果。本文对车载导弹海上射击视景仿真中的海浪、三维场景建模及仿真驱动、地形匹配、瞄准线及分划、导弹弹道、目标毁伤效果等进行探讨。
1海浪仿真
采用改进的Gerstner模型构建海浪的几何外形可获得较逼真的海浪,即在Gerstner模型的基础上,引入波形控制因子μ,通过改变μ值,不仅可以调节波浪的陡峭程度,还可避免“交叠”。将多个单元波叠加,并将其扩展到二维表面,改写成海浪的波数表达式为
(1)

这种方法取得逼真度的同时却牺牲了实时性[1]。为此,通过构造海浪的快速傅里叶变换(FFT)模型有效解决逼真度与实时性之间的矛盾。FFT方法的数学表达式为

(2)

FFT方法所需要的参数通过海浪谱来得到。采用二维海浪谱,同时考虑海浪能量相对于频率和方向的分布。频谱选择P-M频谱,方向谱采用ITTC(国际船模试验池会议)建议的方向扩展函数[2]。
2三维场景建模及仿真驱动
2.1三维场景建模
采用MultiGen Creator作为三维模型的可视化建模工具,来完成三维视景所需的大面积地形、天空模型和实体模型建模。
地形建模步骤主要包括[3]地图输入(扫描仪); 等高线矢量化(Vector 专用矢量化软件);矢量输出(DEM文件、DLG文件);导入MultiGen Creator并生成地形*.flt文件;完善修改并增加文化细节。
图1是在MultiGen Creator中生成*.flt文件时采用规则网格算法生成的具有规则网格的地形模块。
天空模型用一个包围地形上空的半球形代替,其上映射蓝天白云的纹理即可。
实体建模主要指各种战斗实体的建模。以坦克为例,图2表示了实体的建模过程。

图1 海港地形

图2 实体建模流程
2.2三维场景仿真驱动
车载导弹系统可作为一个战斗单元加入到分布式虚拟战场环境仿真中去。本文选择HLA/RTI作为实现分布式仿真框架的基础,选用OpenGVS作为本系统的视景管理软件。OpenGVS体现了“面向可视模型的视景仿真”的思想,通过标准化的高层接口隐藏了视景仿真内含的复杂数学运算,提供易用的工具和编程接口,从而可以很快的进行视景仿真软件的开发,并利用视景管理软件提供的内部优化功能,充分发挥图形软硬件的性能[4]。视景仿真软件负责视景各种要素的组织以及结合用户交互动作对模型进行实时调度,支持各类显示外设和各种交互设备,可以方便的实现碰撞检测、地形匹配等,大大降低了视景仿真的开发难度。
3三维实体地形匹配仿真
3.1陆地的地形匹配
采用四点匹配法来实现陆地的地形匹配。在不考虑悬架的弹性影响下选择坦克车体4个车轮,坦克不离开地面,车轮与地面没有侧向滑移,也没有纵向打滑,只作纯滚动的情况下,提出了四点匹配法。四点匹配法实现流程如图3所示。

图3 四点匹配法实现流程
3.2海面的地形匹配实现
海面匹配实现流程如图4所示。
4瞄准线及分划仿真
4.1炮长瞄准镜视距模型
炮长在瞄准镜中所能观察视场近似为以瞄准镜为顶点,以瞄准线为轴线的圆锥体。与炮长光学瞄准具的性能参数相对应,具有两套视景模型:对应于8倍的高倍视景模型;对应于1倍的低倍视景模型。其中高倍视景模型视场角设为8°,后裁剪面设在7 000 m处;低倍视景模型视场角设为30°×20°,后裁剪面设在7 000 m处,并在瞄准具内画有相应分划。
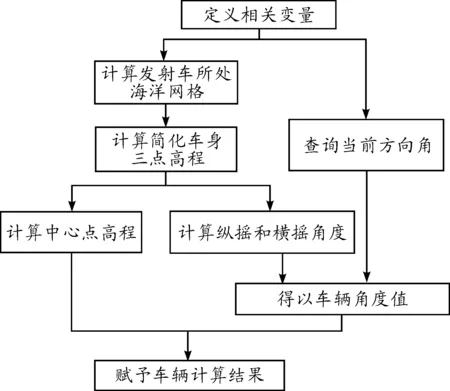
图4 海面匹配计算流程
4.2激光测距模型

(3)
在构造出相交矢量之后,运用碰撞检测方法判断该相交矢量是否和视场中的其它物体发生了碰撞。若发生碰撞,则返回离炮长视点碰撞体的距离信息。
4.3瞄准分划运动模型
车载导弹采用半自动瞄准线制导,导弹以瞄准线为基准震荡飞行,所以瞄准分化的运动仿真非常关键。采用瞄准线独立的火控系统,由炮长通过操纵台控制瞄准线,实装上操纵台转角与瞄准镜转速关系符合二次曲线,如图5所示。
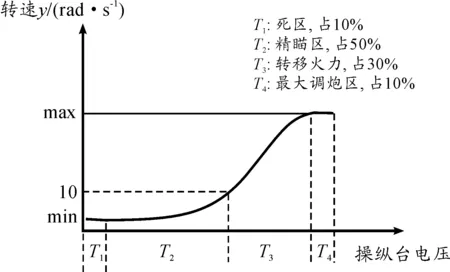
图5 操纵台信号与瞄准线转速关系曲线
二次曲线方程的参数由火控系统最大瞄准速度、最小瞄准速度、最大调炮速度以及操纵台数据采集系统的A/D转换精度决定。
5车载导弹弹道仿真
导弹是一个可控制的刚体运动,可用一组联立的微分方程组描述,车载导弹运动方程如下[5]:
(4)

Ycosγc-Zsinγc-Gcosθ+fcy]
(5)

Ysinγc+Zcosγc+fcz]
(6)
(7)

(8)
(9)
(10)
(11)
(12)

(13)

(14)

(15)
(16)
其中:P为导弹发动机推力;X、Y、Z为导弹在空间运动中的阻力、升力和侧向力;G为导弹的重力;fcx、fcy、fcz为导弹控制系统作用在导弹上的控制力的投影;Mcx、Mcy、Mcz为控制力矩;Jx、Jy、Jz为导弹对三个轴的转动惯量;M为飞行导弹质量;mc为导弹质量变化率;v为导弹飞行速度;t为导弹飞行时间;α为攻角;β为侧滑角;γ为滚转角;θ为弹道倾角;ϑ为弹体倾角(XOY平面);ψ为弹体倾角(XOZ平面);wx、wy、wz为弹体旋转角速度。
导弹动力学、运动学方程组中的变系数很多,可根据当时的攻角和马赫数的变化实时计算[6]。对方程系数的计算采用了线性插值和抛物线插值。对于二维的系数采用了线-线插值和线-抛插值法。采用四阶龙格-库塔法解微分方程,精度较高,再将射手的操作控制信号实时迭加上去,就可以实现对车载导弹弹道的逼真模拟。
6目标毁伤效果仿真
6.1毁伤级别以及毁伤树的建立
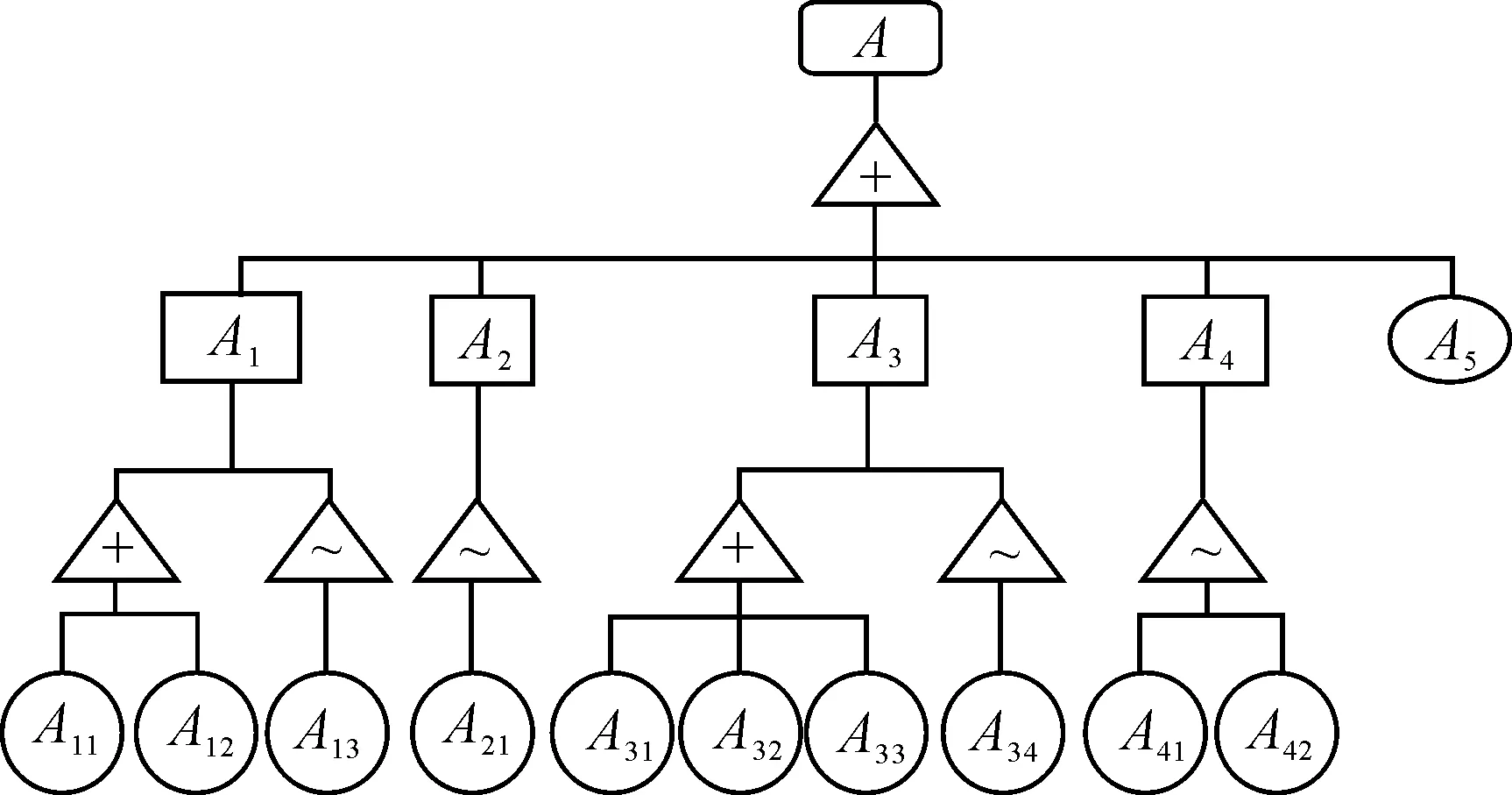
为了正确合理地评估目标坦克的毁伤情况,把目标的毁伤分为:“M”级毁伤(运动性毁伤)、“F” 级毁伤(火力性毁伤)、“K”级毁伤(摧毁性毁伤)。其中,F级毁伤的毁伤树如图6所示,图6中“+”表示逻辑或关系,“~”表示会产生一定的影响,非必然事件。
6.2坦克目标毁伤评估模型
确定目标毁伤指标为机动性毁伤和火力毁伤,分别以机动性生命值(FM)和火力生命值(FF)来表征,仿真系统运行过程中坦克的性能仿真完全以FM、FF两个参数值为依据。机动性生命值“FM”:0= 车载导弹海上射击模拟训练视景及目标毁伤效果如图7和图8所示。 A-F级毁伤;A1-武器毁伤;A2-弹药系统毁伤;A3-火控系统毁伤;A4-操作手伤亡;A5-主弹药;A11-火炮身管;A12-炮尾及附件;A13-机枪;A21-自动装弹机;A31-炮长观瞄测距设备;A32-电气或液压操纵系统和控制与显示装置;A33-火炮双向稳定装置;A34-弹道计算机;A41-炮长伤亡;A42-装弹手伤亡 图6装甲车辆F级毁伤树图 图7 车载导弹海上射击模拟训练视景 图8 目标毁伤效果 7结束语 本文对海浪、三维场景建模及仿真驱动、地形匹配、瞄准线及分划、导弹弹道、目标毁伤效果等车载导弹海上射击视景仿真关键技术进行了研究。研究成果已应用于某型车载导弹海上射击模拟训练系统,对提高训练效益、增强训练效果、节省训练经费、减少装备损耗具有重要意义。 参考文献: [1]LiZheng-you,HouXue-long.OceanWaveReal-timeSimulationBased-onOceanWaveSpectrumandFFT[C]//ProgressinAppliedSciencesEngineeringandTechnology,Qingdao,China:TransTechPublicationsLtd,May20,2014:3531-3536. [2]侯学隆.基于FFT的海浪实时仿真方法[J].计算机工程,2009,35(22):254-256. [3]孟晓梅,刘文庆.MultiGenCreator教程[M].北京:国防工业出版社,2005. [4]Quantum3D.OpenGVSProgrammingGuideVersion4.3[M].Quantum3D,Inc-OpenGVSDevelopmentCenter,1999. [5]张有济.战术导弹飞行力学设计[M].北京:宇航出版社,1999. [6]袁子怀,钱杏芳.有控飞行力学与计算机仿真[M].北京:国防工业出版社,2001. (责任编辑周江川)