机动目标跟踪中一种改进的自适应卡尔曼滤波算法
2015-12-15骆荣剑钱广华
骆荣剑,李 颖,钱广华,魏 祥
(中国人民解放军重庆通信学院,重庆400035)
0 引言
机动目标跟踪无论是在国防领域还是在民用领域都具有很大的应用背景,比如在国防方面的舰载预警系统、战场监视系统、水下的声纳跟踪攻击系统和导弹精确制导系统等领域;在民用领域里,应用于电子医学、语音源的定位、无线通讯中的信道盲均衡及盲检测以及在经济方面的数据预测等领域[1]。为此,许多目标跟踪模型被提出,比较有影响的模型有“当前”统计模型,交互式多模型[2]及singer模型[3]。与其他模型相比,“当前”统计模型能够更加真实地反映机动目标的运动范围和强度变化,在机动目标跟踪中得到较好应用,不足之处在于,模型中需要预先设定机动频率及加速度极限值。针对这一问题,文献[4]采用模糊理论来解决加速度方差自适应问题,但该方法需要构造隶属度函数,而且隶属度函数的构造仍需预先设定一些参数,因此,会引入一些新的问题。文献[5-6]主要利用加速度方差和加速度扰动增量的绝对值之间存在的线性关系来实现加速度方差的自适应,提出了一种新的加速度方差自适应算法。文献[7]采用截断正态概率密度模型来实现其自适应,其原理为通过距离函数之间的关系来表征目标机动的强弱状况,采用指数函数来自适应调整运动目标的加速度极值和机动频率。文献[8]根据雷达实时观测信息,利用加速度扰动与位置变化量之间的物理关系,实现了加速度方差自适应,缺点在于并没有考虑机动频率的自适应问题。基于“当前”统计模型的自适应滤波算法已经成为机动目标跟踪领域的研究热点[9-10]。本文在已有改进算法的基础上提出了一种机动频率和加速度方差双变量自适应算法,并通过实验仿真验证了所提算法的有效性。
1 “当前”统计模型自适应算法
“当前”统计模型自适应滤波算法是建立在卡尔曼滤波算法基础上的,其基本的滤波方程为[11]

(1)式为状态一步预测,(2)式为状态一步预测方差,(3)式为滤波增益,(4)式为状态更新,(5)式为方差更新。
当“当前”加速度为正时

当“当前”加速度为负时

由于采用把加速度的一步预测值看作瞬时“当前”加速度均值,故(1)式可以简化为

(9)式中,
2 改进的“当前”统计模型自适应算法
2.1 机动频率自适应
加速度的相关函数和状态方程为

(11)式所描述的物理过程是这样的:目标机动频率α越小,其对应相关函数就越大,目标机动就越小,即加速度变化就越缓慢;目标机动频率α越大,其对应相关函数就越小,目标机动就越大,即加速度的变化就越急剧。这说明α的物理涵义是代表加速度变化强度的物理量。对(12)式两端求均值得



(14)式的离散形式可写为
在对目标进行滤波预测中有如下表达式

在“当前”统计模型[9]中把的一步预测看作是kT时刻瞬时的“当前”机动加速度的均值,即

在采样间隔很小的情况下可以采用相邻两时刻的加速度均值来代替(18)式,即


由于机动频率α是非负的,因此,对(21)式整理后取绝对值得

从(22)式可以看出,在目标发生较大机动时,目标前后时刻加速度变化加大,此时加速度的相关性减弱。由(22)式知,此时机动频率α也相应变大,而α变大的物理涵义是加速度变化加剧,相关程度降低,这说明(22)式求解的α自适应与实际目标运动过程是相符的,因此具有理论上的可行性。
2.2 加速度方差自适应

实际经过量测修正后的目标位移状态估计值为

(24)式中,Δv=ΔaT,则目标在k时刻的状态值与预测值之差Δd为

于是可得

当目标做匀速运动时E{Δa}=0,此时E{Δd}=0,可以看出当目标做匀速运动时,当目标处于机动状态时,加速度时刻在变化,此时E{Δa}≠0,E{Δd}≠0,所以(26)式较好反应了目标状态误差与加速度变化量之间的关系。由于机动目标加速度方差和加速度变化量的绝对值之间存在线性关系[8],从(26)式可以看出,加速度的变化量与目标状态值和目标状态预测值之差已存在线性关系。所以利用目标状态值与状态预测值之间的差值关系得到了一种新的加速度方差自适应估计公式

改进后的参数自适应滤波方法流程如下。

本文所提改进算法无需进行机动检测,也不需要根据经验而预先设定机动频率和加速度极限值。故改进算法更能适应机动目标的跟踪。
3 仿真及结果分析
目标初始位置为x0=20 000 m,y0=3 000 m,z0=1 000 m,首先沿x负方向作匀速直线运动,速度为v=-480 m/s,时间为[0,40 s],而后在一个与竖起平面成θ=300的平面内作一周圆周运动,时间为[41 s,111 s],最后沿x负方向作匀速直线运动,时间为[112 s,150 s],量测噪声建模[11]:假设量测噪声与距离存在关系式V(k)=(βx(k)+Δx0)ω(k),其中,ω(k)均值为0,方差为1的正态伪随机数,Δx0=100 m,则R(k)=(βx(k)+Δx0)2E[ω2(k)]为噪声方差。选择x方向上的目标分量轨迹进行分析。算法性能评价指标为均方根误差

(36)式中:N为蒙特卡洛仿真次数,实验中N=100;i为第i次蒙特卡洛仿真;分别为k时刻运动目标状态的真实值和估计值。对自适应卡尔曼滤波(AF)、文献[5]提出的方差自适应滤波(ZAQ)、文献[6]提出的方差自适应滤波(BHX)及本文改进的机动频率及加速度方差自适应滤波(MAF)进行对比仿真实验。实验中,T=0.1,β=0.001,amax=150,分别在机动频率为 α=0.05,α=0.3及α=0.7下进行3组仿真实验。在机动频率为α=0.05下进行的仿真实验如图1—图3所示;在机动频率为α=0.3下进行的仿真实验如图4—图6所示;在机动频率为α=0.7下进行的仿真实验如图7—图9所示。

图1 位移均方根误差Fig.1 RMSE of the location
从3组仿真实验可以看出,本文所提算法在对目标位置估计精度、速度估计精度及加速度估计精度上都优于“当前”统计模型自适应滤波算法及其改进滤波算法,在机动频率为α=0.05时,从图1—图3可以看出,此时几种滤波算法跟踪精度相差不是很大,位移跟踪精度在50 m左右,速度跟踪精度都在20 m/s左右,加速度跟踪精度都在5 m/s2左右。但是当机动频率取 α=0.3,α=0.7时,从图4—图9位移、速度及加速度的均方根误差对比图可以看出,自适应卡尔曼滤波(AF)跟踪误差逐渐增大,张安清及巴宏欣提出的加速度方差自适应也随之增大,只有在本文所提算法下进行的目标跟踪才保持了较好的跟踪精度。从图1—图9可以看出,本文所提算法实现的滤波自适应,不仅提高了机动目标的跟踪精度,而且在初始时刻的收敛速度已明显好于其他滤波算法。
从(33)式可以看出,本文所提机动频率自适应需要实时计算机动频率,而在自适应卡尔曼滤波算法、文献[5]提出的方差自适应滤波(ZAQ)及文献[6]提出的方差自适应滤波(BHX)中,机动频率都预先设定为常数,因此,本文所提算法在计算量上稍大于上述算法。
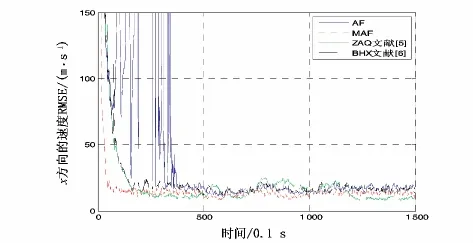
图2 速度均方根误差Fig.2 RMSE of the velocity
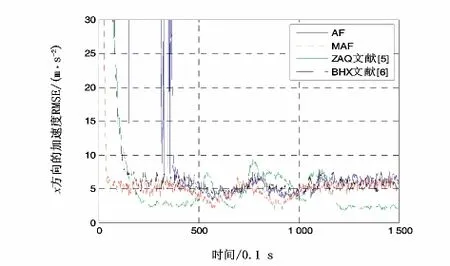
图3 加速度均方根误差Fig.3 RMSEof the acceleration

图4 位移均方根误差Fig.4 RMSE of the location

图5 速度均方根误差Fig.5 RMSE of the velocity
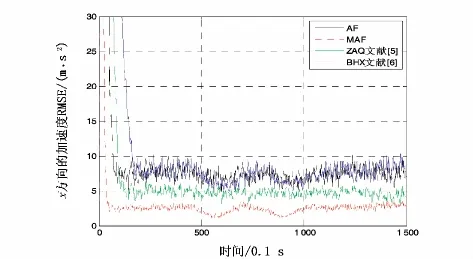
图6 加速度均方根误差Fig.6 RMSEof the acceleration

图7 位移均方根误差Fig.7 RMSE of the location

图8 速度均方根误差Fig.8 RMSE of the velocity
4 结束语
本文提出了一种新的机动频率及加速度方差自适应算法,在“当前”统计模型的基础上,合理分析了机动频率及加速度方差的物理含义,充分利用了最新的观测信息,在机动目标跟踪中实现了机动频率及加速度方差自适应调整,改进后的算法更好地适应了非机动目标或机动目标的跟踪。避免了由于机动频率或加速度极限值设置不合理而带来的跟踪误差,理论分析和实验仿真结果表明,无论是在跟踪匀速目标还是跟踪机动目标,本文所提算法都具有较高的跟踪精度。
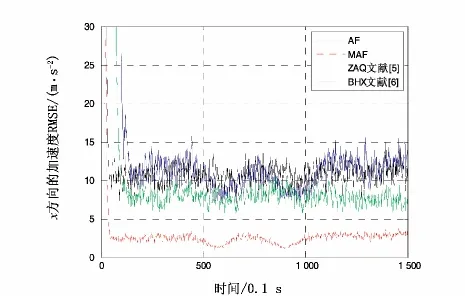
图9 加速度均方根误差Fig.9 RMSEof the acceleration
[1]李翠丽.机动目标跟踪算法研究[D].西安:西安电子科技大学,2013.
LI Cuili.Maneuvering target tracking algorithm[D].Xi’an:Xi’an University of Electronic Science and Technology,2013.
[2]何友,修建娟,关欣.雷达数据处理及应用[M].北京:电子工业出版社,2013:307-310.
HE You,XIU Jianjuan,GUAN Xin.Radar data processing and application[M].Beijing:Electronic Industry Press,2013:307-310.
[3]MAHAPATRA P R,MEHROTRA K.Mixed coordinate track-ing of generalized maneuvering targets using acceleration and Jerk models[J].IEEE Transactions on Aerospace and Electronic Systems,2000,36(3):992-1000.
[4]BAHARI M H,KARSAZ A,KHALOOZADEH H.High maneuver target tracking based on combined Kalman filter and fuzzy logic[C]//Proc Information,Decision and Control IDC.[s.l.]:[s.n.],2007:59-64.
[5]张安清,文聪,郑润高.基于当前统计模型的目标跟踪改进算法仿真分析[J].雷达与对抗,2012,32(1):24-27.
ZHANG Anqing,WEN Cong,ZHENG Rungao.Statistical model based on the current target tracking improved algorithm simulation analysis[J].Radar and confrontation,2012,32(1):24-27.
[6]巴宏欣,何心怡,方正.机动目标跟踪的一种新的方差自适应滤波算法[J].武汉理工大学学报:交通科学与工程版,2011,35(3):448-452.
BA Hongxin,HE Xinyi,FANG Zheng.A new variance adaptive filtering algorithms for maneuvering target tracking[J].Wuhan University of Technology:Transportation Science&Engineering Edition,2011,35(3):448-452.
[7]YU H X,FU C K,JIANG L.A fuzzy adaptive tracking Algorithm based on current statistical probabilistic data association[C]//IEEE.Procing of the 2nd international conference on signal processing system.New York:IEEE press,2010:757-759.
[8]崔彦凯,梁晓庚,贾晓洪,等.改进的机动目标当前统计模型自适应跟踪算法[J].计算机仿真,2013,30(3):42-47.
CUI Yankai,LIANG Xiaogeng,JIA Xiaohong,et al.Improved adaptive current statistical model maneuvering target tracking algorithm[J].Computer Simulation,2013,30(3):42-47.
[9]朱学平,孟江浩,许涛,等.基于机动目标跟踪的相控阵雷达导引头一体化制导技术研究[J].西北工业大学学报,2013,31(5):695-700.
ZHU Xueping,MENG Jianghao,XU Tao,et al.Maneuvering target tracking based on phased array radar seeker and guidance technology integration[J].Northwestern Polytechnical University,2013,31(5):695-700.
[10]黄伟平,徐毓,王杰.基于改进“当前”统计模型的非线性机动目标跟踪算法[J].控制理论与应用,2011,28(11).1723-1728.
HUANG Weiping,XU Ming,WANG Ji.Improved“current”non-linear statistical model maneuvering target tracking algorithm[J].Control Theory&Applications,2011,28(11).1723-1728.
[11]周宏仁,敬忠良,王培德,等.机动目标跟踪[M].北京:国防工业出版社,1991:134-145
ZHOU Hongren,JING Zhongliang,WANG Peidai,et al.Maneuvering target tracking[M].Beijing:National Defense Industry Press,1991:134-145.
