三维激光扫描仪平缓地形分区扫描方法研究
2015-12-14刘会云李永强刘文龙牛路标闫阳阳杨莎莎
刘会云,李永强,刘文龙,牛路标,毛 杰,闫阳阳,杨莎莎
(1.河南理工大学 测绘与国土信息工程学院,河南 焦作454000;2.北京工业职业技术学院,北京100048)
激光扫描技术是近年来测绘领域迅速发展的一项前沿技术,具有数据获取速度快、精度高、非接触以及能快速获取密集面阵点云等优势,展示出广阔的发展前景。按搭载平台的不同,激光扫描主要分为机载激光扫描、车载激光扫描和地面三维激光扫描,其中地面三维激光扫描由于其相对方便灵活的特点,在文物保护、考古、精细三维建模、灾害测量等领域得到广泛应用[1-4]。地形测量是三维激光扫描应用的一个重要方面,通过快速获取地表密集面阵点云,并采用相应数据处理方法,构建精细三维表面模型,为各种应用提供基础数据支持。在工程施工中,利用精细三维表面模型为精确地形测量和土方量算提供技术支持,可快速掌握工程进展情况[5-8]。通过对同一区域不同时期精细三维表面模型的对比分析,可以在不需要控制点支持的情况下,从面覆盖的角度实现地表变化探测与检测,对于控制点布设困难以及控制点容易遭到破坏的监测和研究工作(例如危险滑坡体监测、沙漠变化监测、开采沉陷监测等[9-15]),具有重要意义。三维激光扫描仪在地形测量方面的应用日益普及,其中的一个重要方面就是平缓地形测量(如开采沉陷监测、工地施工测量、公路竣工测量等),受架设仪器高度的限制,在扫描平缓地形时,有效扫描半径往往只有几十米,在扫描边缘区域时,扫描点密度非常稀疏,若要增加边缘点密度,则需要大幅度增加扫描时间,作业效率受到限制。本文在深入分析三维激光扫描仪作业原理的基础上,提出分区扫描方法,基于数据点密度均衡的原则,对不同扫描区域设置不同的扫描参数,合理分配数据点,减少冗余数据,缩短数据采集时间,提高对平缓地形测量的作业效率。
1 三维激光扫描仪工作原理
地面三维激光扫描仪主要有两种工作模式:脉冲模式和相位模式,用于地形测量的三维激光扫描仪多为脉冲模式。激光扫描仪在内置伺服系统驱使下,在水平方向和垂直方向分别以等角度发射并接受脉冲信号,根据各脉冲飞行时间测量各扫描点到激光扫描仪中心的距离,根据各扫描射线与激光扫描仪自定义坐标轴的夹角,计算各数据点在扫描仪自定义坐标系内的坐标。在仪器高度H一定的情况下(见图1),同一条竖直扫描线内,扫描仪以步进角度θ扫描数据,随着扫描角度α的增加,扫描半径逐渐增大,相邻扫描点的间隔也逐渐增大,当扫描角度接近90°时,扫描半径变得很大,相邻扫描点的间隔也非常大。假设仪器中心距地面1.8m,则不同扫描角度α所对应的扫描半径如表1所示。同样,在水平方向内,激光扫描仪以等角度绕竖直轴旋转,每步进一个角度,激光扫描仪获取一条竖直扫描线数据,随着扫描半径的增加,相邻竖直扫描线间数据的间隔也逐渐增加。

图1 垂直方向扫描角度与扫描半径关系示意图

表1 扫描角度与扫描半径对照表

图2 数据点分布示意图
图2为激光扫描仪数据点分布示意图,从图中可以看出,激光扫描点在仪器中心附近,点的密度非常大,随着距离的增加,扫描点密度逐渐减小,在边缘区域变得非常稀疏。三维激光扫描仪对平缓地形测量的数据点分布非常不均衡,半径10m的小区域集中了整个测站80%的数据点,存在大量冗余数据,而其它所有边缘区域数据量仅为20%,外围数据点密度严重不足,这是单一参数设置方法存在的主要问题。
2 分区测量方法
使用地形三维激光扫描仪获取平缓地形数据时,一个重要的原则是尽可能获得密度均衡的数据点。使用三维激光扫描仪获取地表精细三维表面模型时,数据点密度是三维表面精度的重要保障,以开采沉陷监测为例,一般情况下,要获得1~2cm的地表精度,数据点的间隔需要达到0.2~0.3m[13,16],只有数据点密度达到一定程度时,才能成为有效扫描。在对平缓地形进行数据采集时,仪器架设高度有限的情况下,其数据分布非常不均匀:在仪器中心附近,数据点的密度非常大,数据点的间隔甚至达到mm级,远远超过应用需求,造成数据的严重浪费;在边缘区域,数据点非常稀疏,这造成每测站的有效扫描半径有限。激光扫描仪以一定的频率发射激光脉冲,发射激光脉冲数量与扫描时间基本成正比关系,若使边缘区域数据密度增加,则需要增加扫描点密度,势必造成扫描时间大幅度增加,作业效率显著降低。在每测站中,有效扫描半径和扫描时间的矛盾,在一定程度上限制了三维激光扫描仪对平缓地形的测量应用。
三维激光扫描仪进行地形扫描时,在水平角度通常采用360°角度扫描,而在竖直角度设置时,不同扫描角度区间所覆盖的环带面积不同,其推导过程如下:设仪器高度为H,扫描角度区间为[α,α+θ],则环带的内环半径为H*tanα,外环半径为H*tan(α+θ),则环带面积为 πH2[tan2(α+θ)-tan2α],如图3所示,可以看出,随着扫描角度α的增加,环带的面积逐渐增加,当扫描角度α接近90°时,即使θ值很小,环带面积仍然很大,若要保证环带内扫描点的密度,则必须使水平和竖直方向的步进角度减小,增大环带内数据点采集时间,增加数据点数量;当扫描角度α较小时,即使θ值较大,环带面积仍然较小,若要提高数据采集效率,则需要增大水平和竖直方向的步进角度,缩短环带内数据点采集时间,减少数据点数量。

图3 扫描角度区间与环带面积关系示意图
基于上述分析,提出分区扫描方法:如图4所示,根据到扫描仪中心距离的不同,将扫描范围分为若干环状区域,每个环状区域分别对应不同的竖直扫描夹角,各区域基于扫描点密度均衡的原则,设置不同的扫描参数。在相同参数设置情况下,各环带内靠近激光扫描仪中心的部分,其数据点仍然比远离扫描中心区域数据点密度大,因此每个环带所跨范围不宜过大,一般情况下,最外围环带宽度以20~30m为宜,内围以10~20m为宜。最外围环带所占的面积最大,而所包含的扫描角度非常小(88°~89°之间),在竖直方向需要设置很小的扫描步进角,同时在水平方向的步进角也需要适当减小,这样才能使整个区域数据点密度增大且相对均衡。最内围环带所覆盖面积最小,所包含的扫描角度较大(45°~70°之间),在竖直方向需要设置较大的扫描步进角,在水平方向的步进角度也需要适度减小。在中间区域,可以设置2~4个环带,相对于外围的环带,在竖直方向和水平方向步进角都要适当增大。
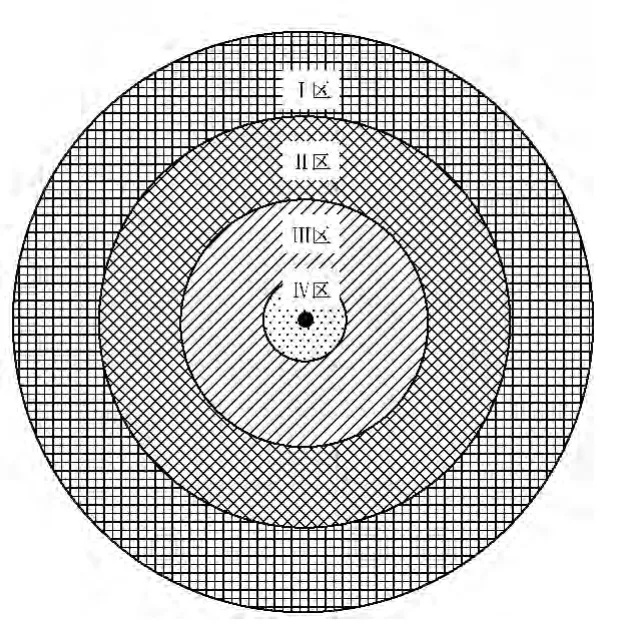
图4 分区扫描原理
3 试验分析
为验证文中所述方法的有效性,作者进行了试验对比分析,选择地形平缓的开阔空地为试验区(见图5(a)),使用Leica Scanstation2激光扫描仪采集数据,仪器设置高度为1.8m,该款仪器扫描角度为360°×270°,采用360°方式扫描后,会在仪器下面留下半径为1.8m的空洞区域。分别采用分区扫描方法和整体扫描方法获取试验区地形数据,参数设置和用时如表2所示。分区扫描方法共分为4个分区,用时26.5min,每次扫描参数设置时间为1min,共计30.5min。整体扫描用时86.5min,参数设置时间为1min,共计87.5min。从作业时间来看,分区扫描所花费时间为整体扫描花费时间的35%,作业效率明显提高。
对各分区数据进行分析,结果如表3所示。可以看出,各分区环带面积与所包含数据点个数呈正比,数据点分布均匀,数据点密度在100~300个/m2,边缘点间隔均大于0.2m。以0.2m数据点密度为有效扫描范围计算,其有效扫描半径超过67m。对整体数据进行分析,按分区扫描半径统计对应分区,结果如表4所示,可以看出,各分区面积所占比例与点数比例呈反比,数据点的分布极不均匀,以0.2m数据点密度为有效扫描范围计算,其有效扫描半径尚不足43m。竖直扫描角度分别为88°~89°、85°~88°、70°~85°、45°~70°的分区扫描方法为较为理想的方法,与整体扫描方式相比,前者在作业效率、有效扫描半径等方面均有明显优势,数据点密度分布得到很大改善,利用效率明显提高。

图5 分区扫描结果对比

表2 试验参数设置

表3 分区扫描结果分析

表4 整体扫描结果分析
4 结束语
本文从地面三维激光扫描仪基本工作原理出发,针对平缓地形扫描时点密度不均匀、冗余数据多、有效扫描半径小等问题,提出分区扫描的方法,不同子分区设置不同的扫描参数,合理分配数据点密度,提高作业效率。分区扫描方法是对单一参数扫描方式的改进,扫描效率明显提高,扫描半径明显增大,将进一步促进三维激光扫描仪在地形测量中的应用和研究。提高三维激光扫描仪对平缓地形测量的效率,主要从两个方面进行改进:①从仪器性能入手,选择性能更优的仪器,缩短单站扫描所需时间;②从作业方法入手,除文中所提出的分区扫描方法外,还可以增加扫描仪架设高度,以增加有效扫描半径。尽管当前三维激光扫描技术发展迅速,仪器设备更新很快,每2~3年即完成一代技术更新,但作为价格昂贵的仪器设备,每款设备都需要有一定的使用年限,在追求仪器性能进步的同时,也需要重视对操作方法的改进。作者下一步研究重点将是研发专门辅助设备工具,在适合野外作业的情况下,有效增加三维激光扫描仪作业高度,增加有效扫描半径,提高作业效率。
[1]李永强,刘会云,冯梅,等.大型古建筑文物三维数字化保护研究_以白马寺齐云塔为例[J].河南理工大学学报:自然科学版,2012,12(2):186-190.
[2]赫春晓,李浩.基于三维激光扫描数据的三维实景构建[J].测绘工程,2013,22(1):81-85.
[3]刘江涛,张爱武.三维数字化技术在三星堆遗址中的应用[J].首都师范大学学报:自然科学版,2007,28(4):68-71.
[4]欧斌.地面三维激光扫描技术外业数据采集方法研究[J].测绘与空间地理信息,2014,37(1):106-108.
[5]曹先革,杨金玲,司海燕,等.地面三维激光扫描点云数据精度影响因素及控制措施[J].测绘工程,2014,23(12):5-7.
[6]王春晓,纪育强,孙强,等.三维激光扫描技术在海洋模型试验中的应用[J].海岸工程,2013,32(2):55-62.
[7]白立飞,潘宝玉,张兰.三维激光扫描技术在数字矿山领域的应用[J].测绘科学,2013,38(5):178-179.
[8]雷朝锋.基于三维激光扫描技术在豫北露天矿测量中的应用研究[J].测绘与空间地理信息,2014,37(8):96-98.
[9]OPPIKOFER T,JABOYEDOFF M,BLIKRA L,et al.Characterization and monitoring of the Aknes rockslide using terrestrial laser scanning[J].Nat.Hazards Earth Syst.Sci.,9,1003-1019,2009.
[10]ABELLAN A,JABOYEDOFF M,OPPILOFER T,et al.Detection of millimetric deformation using a terrestrial laser scanner:experiment and application of a rockfall event[J].Nat.Hazards Earth Syst.Sci.,9,365-372,2009.
[11]赵小平,闫丽丽,刘文龙.三维激光扫描技术边坡监测研究[J].测绘科学,2010,35(4):25-27.
[12]丁连刚,严平,杜建会,等.基于三维激光扫描技术的草方格沙障内蚀积形态监测[J].测绘科学,2009,34(2):90-92.
[13]徐进军,王海城,罗喻真,等.基于三维激光扫描的滑坡变形监测与数据处理[J].岩土力学,2010,31(7):2188-2191,2196.
[14]LI Yongqiang,LIU Huiyun,WEI Fengyuan.Research on Techniques and Methods of 3DLaser Scanning Monitoring Coal Mining Subsidence[J].室兰工业大学纪要,Vol.59,pp.115-118,2010.
[15]周大伟,吴侃,周鸣,等.地面三维激光扫描与RTK相结合建立开采沉陷观测站[J].测绘科学,2011,36(3):79-81.
[16]张舒,吴侃,王响雷.三维激光扫描技术在沉陷监测中应用问题探讨[J].煤炭科学技术,2008,36(11):92-95.
