RADARSAT-2全极化SAR数据地表覆盖分类
2015-12-14王崇倡张继超
程 千,王崇倡,张继超
(1.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新123000;2.国家农业信息化工程技术研究中心,北京100097)
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种主动式微波遥感成像系统,自20世纪50年代问世以来,已经逐步发展成为非常重要的遥感工具。极化SAR(PolSAR)通过测量地面每个分辨单元4种基本极化散射回波的幅度和相位,获取目标的极化散射矩阵,用以刻画地物的后向散射特征[1]。因此,极化SAR具有信息量大的优点,并且已经成为当前SAR研究和发展的热点,而全极化雷达是合成孔径雷达发展的一个重要方向,在地表覆盖分类中发挥着越来越重要的作用[2]。在全极化数据日益海量化的背景下,进行全极化SAR影像分类研究具有迫切的现实意义和广阔的应用价值。目前,神经网络[3]、遗传算法、模糊分类、支持向量机[4]、改进的最大似然分类、多视图像分割等方法在SAR影像地表覆盖解译方面取得了大幅度的进步。在此基础上本文紧紧围绕如何提高极化SAR影像分类的精度和可靠性展开研究。由于散射机理与地物之间并不是一一对应关系,因此基于散射机理的全极化SAR非监督分类方法的分类结果会存在地物类别模糊的问题[5]。而特征选取的好坏直接导致了分类精度的差异变化,怎样在大量的数据中快速挖掘出重要的特征非常重要,决策树算法刚好解决了这个问题[6-7]。
本文采用北京地区的RADARSAT-2全极化雷达数据,利用PolSARPro软件提取包含地物散射机理信息的各种极化参数,按 H-α、A-α、H-A 对全极化SAR图像进行基于散射机理的分类,继而将分类结果作为 Wishart H/A/α、Wishart H/α的初始类别划分,然后采用决策树分类算法对基于Wishart分布的监督分类及以上两种分类算法进行融合处理,从而实现地物的准确分类。
1 极化目标分解原理
极化SAR系统测量得到的目标散射矩阵或者Stokes矩阵通常反映的是这些散射体集合的平均散射特性,直接利用它们分析地物目标的散射特性是困难的。极化SAR目标分解[8]就是将地物回波的复杂散射过程分解为几种单一的散射过程,每种散射过程都有一个对应的散射矩阵。这有利于分析目标的散射特性,有助于解译地物的散射机理。
基于目标散射矩阵分解的Pauli分解是最简单的相干分解方法,Pauli基[9]是完全正交基,具有一定的抗噪性,即使是在去极化效应或有噪声的情况下,仍然可以分解。
Pauli基矩阵为

满足互易条件即Shv=Svh时,散射矩阵S可以写成如下形式:


Pauli分解简单易用,通常把归一化功率值分别对应蓝、红、绿3种色彩形成彩色合成图,用以检验极化数据的可靠性,从而对影像进行初步解译。本文通过PolSARPro软件对北京地区2009年9月23日获取的RADARSAT-2全极化数据进行Pauli分解,结果如图1所示。

图1 基本极化图与Pauli彩色合成图
2 实验分类方法与结果分析
2.1 研究区概况及数据
选用北京地区2009年9月23日获取的RADARSAT-2全极化数据,其距离向分辨率为4.73m,方位向分辨率为4.76m,入射角为33.4°。该数据是SLC格式的单视复影像,具有4个极化通道,即HH、HV、VH 和VV。裁剪大小为1 200像素×1 500像素的一块子区域作为实验区,裁剪区为北京颐和园附近,基本包括5种典型地物:水体、飞机场、植被、道路、居民地。同时获取了同年6月28日的Quickbird影像作为辅助解译影像。
2.2 实验分类方法
结合实验数据,辅以PolSARPro及ERDAS Imagine软件对RADARSAT-2全极化数据进行地表覆盖分类实验。
2.2.1 滤波降噪
为了降低相干斑的影响,需对数据进行滤波处理。PolSARPro中的滤波器主要有:Box Car、Box-Car-Edge、C.Lopez、Gauissan、J.S.Lee Refind和J.S.Sigma滤波器。分别对这几种滤波器进行操作,试验结果表明BOX Car滤波器具有良好的边缘保持和斑点抑制效果。
2.2.2 目标分解
利用PolSARPro软件直接对滤波后影像的相关矩阵进行特征向量及特征值的极化分解,得到lambda、anisotropy、pedestal等图像。相关矩阵分解是3个相互正交的相关矩阵的加权和,并满足方位向对称性[10]。其中,3个相关矩阵分别代表3个相互独立、互补相关的散射过程:单向散射、双向散射和交叉散射。为了便于分析,引进了3个参数:熵(H)、各向异性(A)和平均α角[9],它们是特征值和特征矢量的函数。
1)熵H。熵H描述了以上3种散射过程的混乱程度和无序性,定义如下:

2)各向异性A。各向异性A描述除了占主导地位的一种散射机制以外的其他两种散射机制的关系,定义如下:

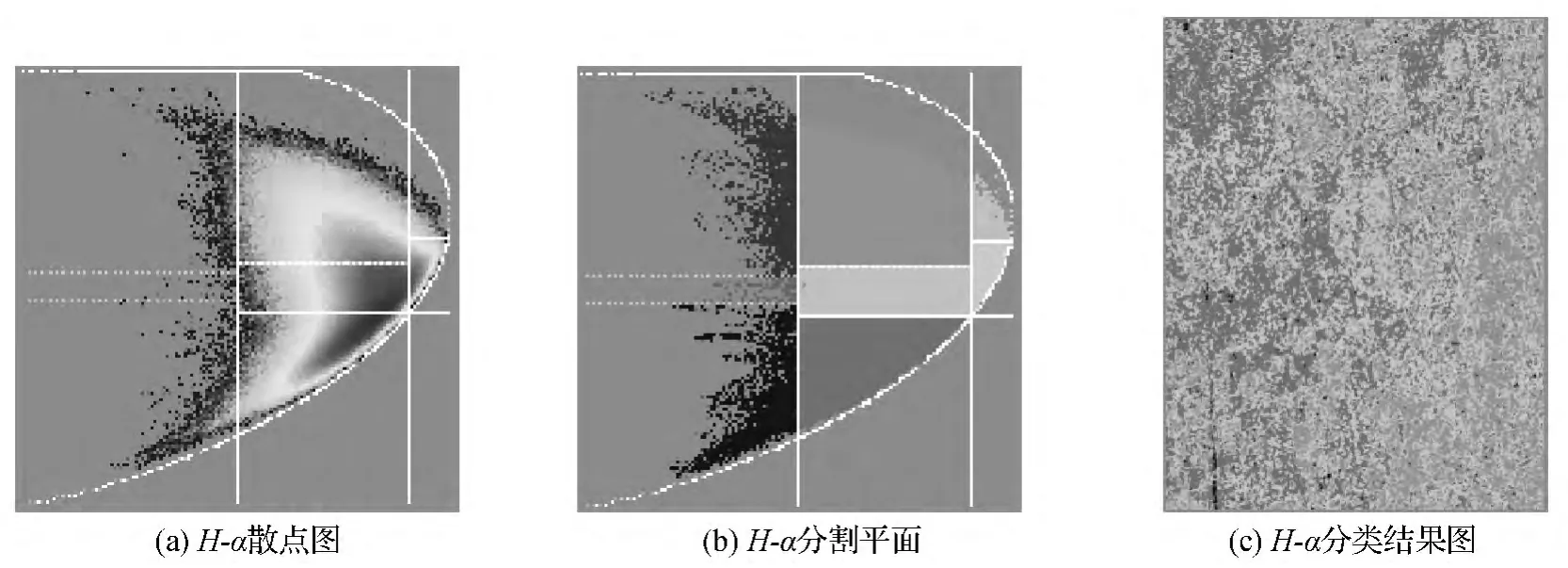
图2 H-α散点图、H-α分割平面及分类结果图
通常假定地物保持方位向对称,A可以用来描述实际地物与这种假定之间的距离。重要的是,假定是由很多单轴小晶体组成的晶体云,它表现为表面散射,表面的法线一般为对称轴,A可以用来衡量晶体走向的分布情况和表面的粗糙度。
3)平均α角。角α是由目标分解衍生出来的一个重要的角度参数,可以用来描述地物的散射特性。平均散射角α为相关矩阵每个特征矢量最大分量相位角的概率加权和[10]。

α值在[0,90°]之间,它反映了3个特征值对应散射机理中的最大项。当α=0时,表示的主要散射机理是各向同性的表面散射;α角增大时,散射机理将成为各向异性的表面散射;当α=45°时,表示为偶极子散射模型,其中一个散射分量为0;随着α角度的增加,反映的散射机理为各向异性的二面角散射;当α=90°时,表示二面角散射。
2.2.3 分 类
对分解得到的多种参数进行多次试验和相关性分析,利用PolSARPro软件按 H-α、H-A、A-α对全极化SAR影像进行基于散射机理的分类,根据H-α、H-A、A-α平面分别把地物散射类型分为8类、5类和6类,结果如图2~图4所示。

图3 H-A散点图、H-A分割平面及分类结果

图4 A-α散点图、A-α分割平面及分类
将以上分类结果作为Wishart H/A/α、Wishart H/α的初始类别划分,从而得到基于Wishart H/α、Wishart H/A/α的非监督分类结果,同时对影像进行基于Wishart分布的监督分类,如图5所示。最后,采用决策树分类算法对以上3种分类结果进行融合处理,生成分类规则,形成决策树(见图6),从而实现地物的精确分类。其最终分类结果如图7所示。
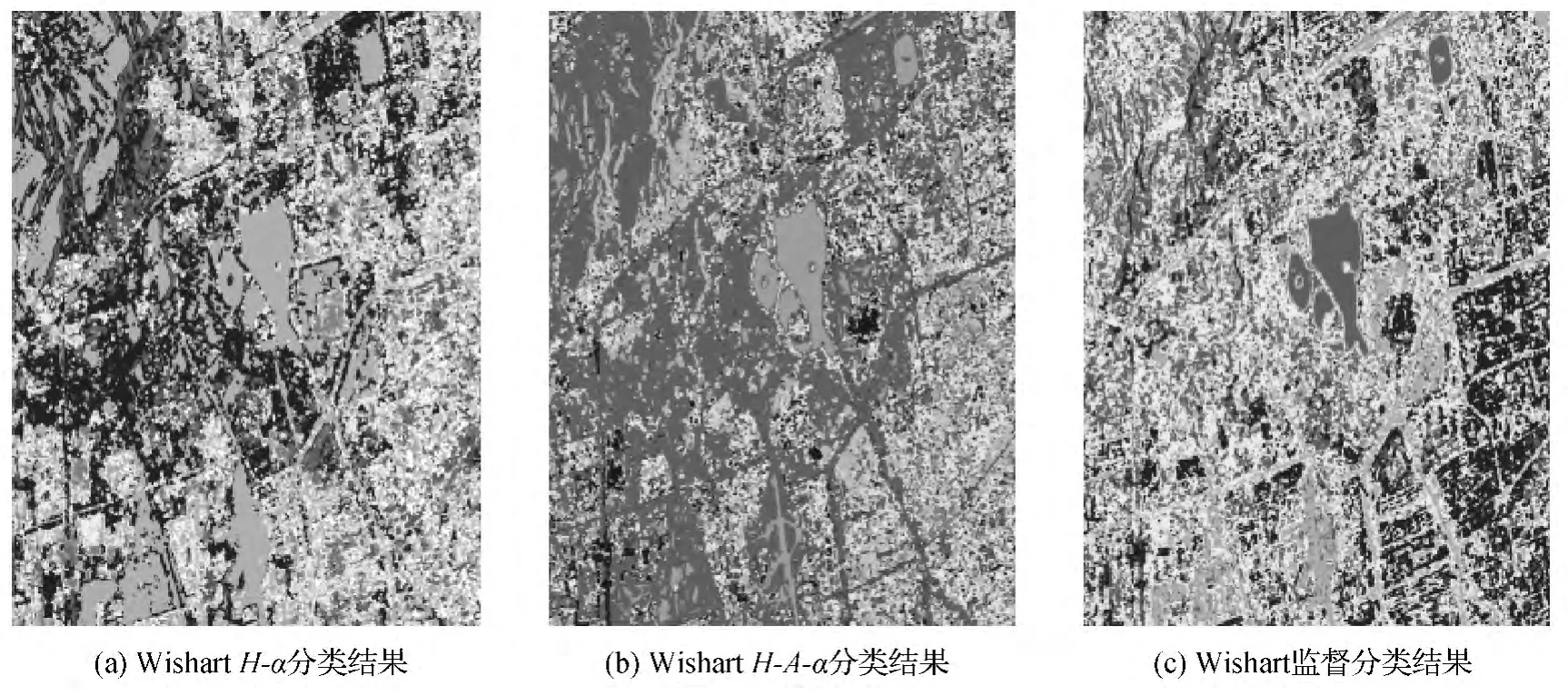
图5 分类结果

图6 决策树分类器规则设置
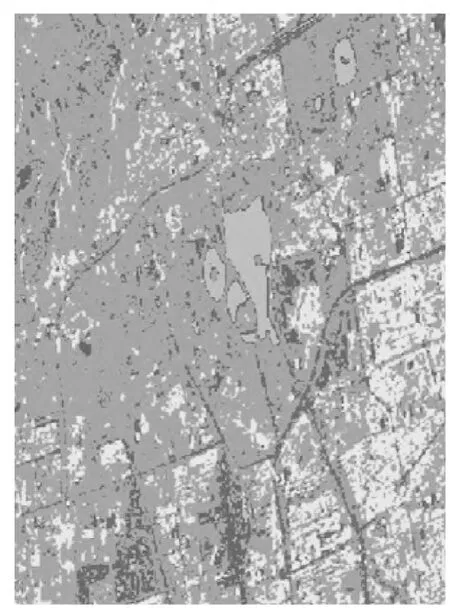
图7 最终分类成果
根据分类结果图可知,Wishart H/α分类的效果一般,其中水域、飞机场、道路及部分植被相互混淆,分类精度最低;Wishart H/A/α分类中水域和飞机场相混淆,道路和部分植被相混淆,影响分类精度;而在Wishart监督分类中分类相对较清晰,但飞机场和部分植被仍然存在很多混淆;而经过决策树算法融合处理的分类方法,得到了分类更加清晰的图像。
2.3 精度评价与结果分析
分类精度评定采用混淆矩阵法,利用ERDAS软件,分别将分类效果相对较好的Wishart监督分类和决策树算法的分类结果与北京地区同期的Quick Bird影像数据进行配准,采用目视判别方法逐像元输入实际地物类别,计算混淆矩阵,从而进行精度评价。评价结果见表1。

表1 Wishart监督分类和决策树分类总体精度评价
由表1的精度比较可以看出:Wishart监督分类中,飞机场和道路的分类精度很差,总体分类精度为49%;而决策树分类解决了上述几种类别的分类问题,Kappa系数均达到了0.4以上,虽然植被和居民地分类精度略低于Wishart监督分类方法,但总体精度达到了64.83%,较监督分类提高了约16%。
3 结束语
本文基于RADARSAT-2全极化数据进行了地表覆盖分类的研究与探索,根据PolSARPro软件提取能够代表地物散射特性的多特征参数,在决策树分类当中起到重要的作用。采用决策树分类算法对基于Wishart分布的监督分类及两种非监督分类算法进行融合处理,能够准确、有效地识别地物的散射特性,使得分类精度有较大幅度提高。
Wishart H/A/α非监督分类虽然能够识别地物的散射机理但不能有效识别地物的类别;传统统计模式的分类又有运算量大、无法获取各个类别的先验概率和概率密度函数、难以形成复杂的判别函数和分割界面等缺点;而决策树模型的分类器规则是由训练样本的特征来决定的,在选择训练样本时数据源的质量好坏及人为因素的添加,都对分类精度有一定的影响。因此,发展灵活、高效的分类算法是值得进一步研究的问题。
[1]朱良,郭巍,禹卫东.合成孔径雷达卫星发展历程及趋势分析[J].现代雷达,2009,31(4):5-10.
[2]吴鸣亚.合成孔径雷达系统的新概念及关键技术[J].现代雷达,2012,34(11):1-5.
[3]王崇倡,武文波,张建平.基于BP神经网络的遥感影像分类方法[J].辽宁工程技术大学学报:自然科学版,2009,28(1):32-35.
[4]林超,杨敏华.基于球结构支持向量机的QuickBird影像分类分析[J].测绘工程,2011,20(3):46-49.
[5]任玉冰,赵磊.迭代非监督分类快速提取林地信息的研究[J].干旱环境监测,2013,27(3):126-130.
[6]LALIBERTE A S,KOPPA J,FREDRICKSON E,et al.Comparison of nearestneighbor and rule-based decision tree classification in an object-orientedenvironment[C]//Proceedings of 2006IEEE International Geoscience andRemote Sensing Symposium.Denver,Colorado:IEEE press,2006:3923-3926.
[7]刘冰.基于决策树方法的ETM+影像湿地信息提取[J].测绘工程,2013,22(1):46-49.
[8]张继超,蔺腊月,张永红,等.基于目标分解的面向对象决策树PolSAR影像分类[J].辽宁工程技术大学学报:自然科学版,2013,32(5):642-647.
[9]余海坤.极化SAR目标特征提取及其应用研究[D].徐州:中国矿业大学,2006.
[10]吴永辉,计科峰,郁文贤.基于Hˉα和改进C-均值的全极化SAR图像非监督分类[J].电子与信息学报,2007,29(1):30-34.
