小行星登陆器星体表面附着锚固方案研究
2015-12-08方宝东宋爱国周必磊
张 军,方宝东,陆 希,宋爱国,李 松,周必磊,徐 亮
(1.东南大学仪器科学与工程学院,南京210096;2.上海卫星工程研究所,上海200240;3.上海市深空探测技术重点实验室,上海200240)
小行星登陆器星体表面附着锚固方案研究
张 军1,方宝东2,3,陆 希2,3,宋爱国1,李 松1,周必磊2,3,徐 亮2,3
(1.东南大学仪器科学与工程学院,南京210096;2.上海卫星工程研究所,上海200240;3.上海市深空探测技术重点实验室,上海200240)
小行星表面微重力环境对于登陆器星体表面附着、运动和作业提出了艰巨的挑战,登陆器锚固在小行星表面又是这些任务中首先要解决的难题。为此,分析了不同表面情况下附着的约束条件,提出了几种可能的登陆器附着锚固方案,对其工作原理、适用条件、优缺点、可否重复利用等方面进行了研究,并分析了在实际应用中所要考虑的因素和采取的可靠方案。继而通过对比研究提出一种基于切割的锚固方法,并设计实现了样机系统对该方法的可行性和有效性进行了试验验证,结果表明该系统切割花岗岩石板大约180 s时的切割深度达15 mm。
小行星探测;微重力;表面附着;锚固方案;切割锚固;3R机械臂
1 引言
小行星是一类小天体,可能含有太阳系起源的证据和生命起源的秘密,因此具有重要的科学研究价值[1];小行星上可能存在有大量高纯度的稀有金属,一些小行星上面可能含有水等资源,小行星采矿的概念和技术近些年得到部分航天机构和公司的广泛研究[2];近地小行星还有可能撞击地球,毁坏人类的生存环境和文明。小行星的科学研究意义、经济开发价值,以及防止其撞击地球的社会意义都使得小行星的研究成为目前深空探测的一个热点。
目前一些小行星观测任务正在进行中,特别是一些近地危险小行星的观测研究。靠近小行星的探测项目可以分为两大类:一类是将体积较小的小行星捕获后拖回到地球和月球的拉格朗日平衡点再进行探测研究[3],这一概念由NASA提出;另一类小行星探测是利用深空探测器飞近小行星对其进行靠近观测、绕飞和伴飞观测、星体表面登陆取样、本地研究或样品返回地球分析,甚至是载人小行星探测。在这些任务中,最重要也是最难的是小行星表面取样和作业,而大量的取样和作业的前提是登陆器能够牢固的在小行星表面附着和锚固。
世界各国的诸多研究机构已经开展了小行星探测任务,一些已经完成的小行星探测项目有美国国家航空航天局的近地小行星交会、深空1号、星尘、曙光号等探测任务和探测器[4],日本的隼鸟1号探测器[5,6]等。正在执行任务的探测器如欧空局的罗塞塔号[7-9]等。还有一些将要进行的探测任务如美国的奥西里斯-风化层探测者[10],欧空局的堂吉诃德小行星防卫任务,以及日本的隼鸟2号探测任务[11]。但是目前还没有成功的实现小行星表面登陆、采样、作业任务,虽然隼鸟1号从小行星Itokawa取回了少量的样品,但是其可能是及其少量的风化层灰尘,科学研究价值不大。
要实现大量的取样和作业任务,登陆小行星是必须的,本文针对登陆器小行星表面附着难题,分析了表面附着的约束条件,提出了几种可能的锚固方案,并对基于切割法的锚固方案进行了深入研究,设计实现样机系统进行了试验研究。本文的研究结果能够为我国小行星探测任务提供借鉴。
2 小行星表面附着约束条件分析
小行星表面与火星和月球等较大的天体相比环境更特殊,其特殊环境对小行星表面附着的约束主要集中在以下几个方面:
1)小行星表面的微重力环境
小行星体积小、质量较轻,因此表面引力非常微弱,依靠小行星无法提供取样器钻进所需要的持续的引力。因此,要想在小行星表面附着、行走和作业首先需要解决登陆器在小行星表面微重力环境附着问题[12]、航天员在小行星表面行走问题、以及取样过程中取样器反推力的平衡问题。
2)小行星表面的真空环境
因为小行星的引力较小,很难捕获空气形成大气层,故小行星没有大气[13],其表面近似超真空环境,电动器件及钻头等工作时的散热将成为问题。在登陆器设计中可以考虑热循环系统,将工作过程产生的热量传导并回收利用,用于登陆器或航天员生命保证系统,实现双重效益。
3)小行星表面的高低温环境
因为小行星表面没有大气层的保护,面向太阳的半边温度较高,背对太阳的半边温度较低,如小行星21 Lutetia表面最高温度约为-28℃,最低温度约为-103℃[14],小行星4 Vesta表面最高温度为-3℃,最低温度为-188℃[15],可见小行星表面温度较低,且温差极大,因此这种环境中温度对机械结构以及电子器件等的影响都可能成为棘手的问题。
4)小行星表面岩石硬度和脆性不确定
小行星表面岩石的硬度和脆性不确定[16],这使得稳固的锚固困难极大,并带有不确定性,所采用的锚固方案必须同时适用于各种硬度和脆性的岩石,这对锚固系统提出了很大的挑战。要实现在不同硬度和脆性的岩石表面锚固附着在地球上也极为不易,更何况是在微重力等小行星特殊环境中。
5)小行星表面风化层厚度不确定
小行星表面受到宇宙射线和太阳辐射的照射、太阳风粒子的轰击、陨石和微流星体的撞击,会形成风化层和碎石层[17],但是以目前对小行星的了解,对其风化层和碎石层厚度和组成等没有完全弄清楚,只有少数小行星探测任务对一些特定的小行星的风化层有所了解,并且这些小行星还表现出不同的风化层厚度[18]。这使登陆器在小行星表面附着难度增大,要实现成功附着,首先需要了解风化层的厚度,并设计多用途和适应性极强的锚固方案。
6)小行星表面地形平整度不确定
根据已有的小行星探测资料,如Itokawa[19]和67P[20]我们知道小行星表面可能存在风化层、陨石柱、裂缝,甚至悬崖等,其表面地形结构复杂,已有的研究结果只能为我们提供借鉴,但是我们对未探测过的小行星表面的平坦度不清楚,这就为表面的着陆、锚固、行走和作业方案的设计和实施带来了困难,我们需要在着陆前通过伴飞和绕飞观测和检测小行星表面的地形信息,寻找平坦的表面进行着陆。
以上的约束条件使小行星表面的附着锚固极具挑战,需要研究可靠和适用范围广的锚固方案。
3 小行星表面附着锚固方案
3.1 风化层和碎石层去除方案
为了使登陆器牢固的附着在小行星表面,需要使其与小行星之间建立刚性连接,而小行星表面的风化层厚度不确定,并可能还有碎石层,其会影响刚性锚固的实施。为此提出以下四种风化层和碎石层的去除方案:
1)吹气法
由于小行星表面重力微弱,借助登陆器着陆过程中喷气可将风化层星壤和碎石吹开。在登陆器下降过程中,不断检测地面环境信息,在接近地面一定高度时,借助反推火箭的喷气将星壤吹开,并通过土壤测厚仪测量厚度,直到星壤被去除后,登陆器再下降着陆。此方法需要登陆器正向和反向推力火箭共同作用,正向推力火箭将登陆器推向小行星,反向推力火箭喷气将星壤吹开,该方案系统所消耗的能量可能很大。
2)喷水法
喷水法指的是登陆器着陆腿上可以安装高压水枪,在登陆器着陆过程中,通过喷水将星壤或碎石冲开,为登陆器附着在坚硬的岩石表面上做好准备。该方案也较为简单,但是该方案需要登陆器储存水,增加了系统的质量,同时喷出的水可能造成样品污染。
3)清扫法
登陆器着陆腿上可以安装柔性旋转清扫装置,将灰尘清扫开。登陆器接近小行星表面时,通过其控制系统,保证登陆器与小行星之间的距离使得着陆腿上安装的旋转清扫装置接触到小行星表面开始清扫,并控制小行星正向推力火箭给清扫装置一个推力,完成清扫后登陆器再着陆。
4)刮削法
刮削法是一种可用于星壤和碎石的清除和取样的机械臂方案。该方法实际操作时,登陆器着陆腿上可以安装刚性旋转刀片或料斗刮削机构,通过刮削去除灰尘和风化层,该方案更适合于表层具有较厚的风化层和碎石层的场合,可靠性高于其它几种方案,但是其结构较为复杂。
四种方案比较:吹气法可以利用登陆器现有的喷气清除灰尘,不需要外部其它设备,简单方便,但在灰尘太厚,或者灰尘颗粒之间的凝聚力太大等情况下,不能完全很好的清除星壤层;喷水法喷出的水可能对样品有污染;清扫法比吹起法更能够清除较多的星壤,但是需要更多的设备;刮削法可以刮去更多的灰尘,但同样需要额外的设备。这四种方案将在实际应用中可选用其中的一种,或者两种组合,如吹气法和刮削法组合。
3.2 岩石层附着锚固方案
在风化层去除的基础上,针对以上的约束条件,提出了以下十种可能的岩石层锚固方案:
1)子弹锚固法
受隼鸟1号[5]小行星探测任务弹丸取样方式的启发,提出子弹锚固法,如图1所示,向目标小行星的多个方向同时发射带有倒钩的子弹,子弹后面连接有细钢丝倒钩,当子弹穿过风化层射入岩石层内后由于倒钩的作用无法拨出,然后收紧钢丝绳就可以达到固定登陆器的目的。该方法适用于岩石层不是过硬的地质条件,其优点是钢丝绳具有一定的柔性,在子弹锚固后可以将登陆器拉向小行星表面,实现登陆器的软着陆,防止其与星体表面碰撞后再次弹开,该方案的缺点是子弹撞击岩石层过程中溅飞起的碎石可能击中登陆器,对岩石的硬度和脆性有限制,且该方案的子弹不能重复使用。

图1 子弹锚固法示意图Fig.1 Diagram of the bullet anchoring method
2)展开锚固法
如图2所示,展开锚固法的工作原理是当登陆器向小行星降落时先垂直向下射出穿甲弹(内含二次遥控高爆子弹头),穿甲弹穿过风化层击碎岩石层表面,登陆器升高至安全距离遥控高爆子弹头爆炸在岩石层下面炸开一个口子。在同一地点重复这一过程,则可以炸出一个有一定深度的坑。通过绳索投下固定锚,固定锚到达深坑伸开两根水平锚杆,水平锚杆同步伸展,其前端具有高频振动打孔器,通过反作用力,两水平锚杆能够分别钻入左右两侧的坚硬岩石壁内,从而实现一个固定锚。通过展开锚上的钢丝绳收紧可以将登陆器锚固在小行星表面。该方法适用于岩石层不是过硬的地质条件,其优点与子弹锚固法的优点类似,其缺点是系统结构比较复杂。
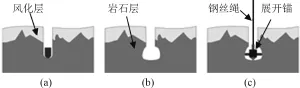
图2 展开锚固法示意图Fig.2 Diagram of the unfolding anchoring method
3)打磨胶固锚固法
如图3所示,打磨胶固锚固法先利用推进器的推力,通过登陆器前端三个固定脚上的三个扫刀将风化层扫开,并形成一个较为平坦的局部表面,使得中间圆柱形脚底接触小行星的坚固物质层,然后打开每个固定脚下的氧气和快速凝固胶水,将三个固定脚粘结到坚固物质层上。胶固法完成任务后固定脚需要脱离登陆器,或者加热熔化已固定的胶水,才能实现登陆器脱离小行星表面,进行多点取样或返回,胶固法的优点是不需要推进器施加很大的推力就可以快速锚固。
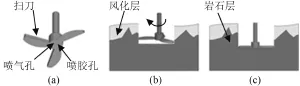
图3 打磨胶固锚固法示意图Fig.3 Diagram of the anchoring method by using glue after polishing
4)钻孔锚固法
如图4所示,在风化层清除后,利用推进器的推力,通过登陆器前端登陆腿上的高低频复合振动钻与岩石层以一定角度倾斜打孔,多个登陆腿上的振动钻打孔后,可以为登陆器提供锚固力,将登陆器刚性固定在星体表面。钻孔锚固法系统结构较复杂,消耗的能量也较大,可以重复使用,缺点是只适合于岩石硬度不是很高的场合,硬度过高的岩石只能打进岩石表皮,并且对岩石脆性可能有要求。
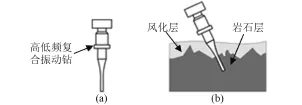
图4 钻孔锚固法示意图Fig.4 Diagram of the drilling based anchoring method
5)可伸缩倒刺钻钉锚固法
如图5所示,可伸缩倒刺钻钉锚固法工作时通过采用火工品提供动力驱动锚钉发射,锚钉打进岩石层后,在钢丝绳拉时,倒刺可以卡紧在岩石孔壁上,提供一定的锚固力。这种锚固方案和子弹锚固法类似,也可以在登陆器接触星体表面前将锚钉打进星体表面,将登陆器拉近星体表面,实现软着陆,但也只适合于岩石硬度不大的小行星,并且不能重复使用。罗塞塔探测器搭载的菲莱着陆器设计使用该方法防止其在彗星67P表面着陆时反弹,但是很遗憾其没有正常工作[21]。但该方法还是有很好的参考价值,可作为未来小行星探测的备选方案之一。
6)夹持锚固法
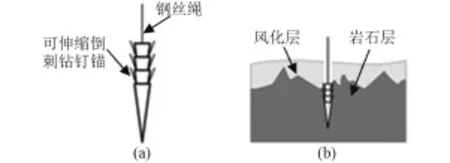
图5 可伸缩倒刺钻钉锚固法示意图Fig.5 Diagram of the anchoring method by using nails with barbs
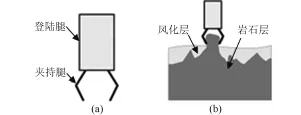
图6 夹持锚固法示意图Fig.6 Diagram of the anchoring method by using grippers
如图6所示,夹持锚固法工作时,登陆腿上带有夹持腿或微型夹持器[22],在登陆器着陆前通过图像传感器等检测到星体表面凸起岩石的地形,降落后通过夹持腿夹住突出岩石从而达到锚固的目的。这种方案的优点是结构简单,可以重复使用,缺点是只适合于小行星表面有凸起岩石的场合,范围较窄,夹持锚固的可靠性不高,且需要精确控制登陆器着陆过程,只可能作为一种配合使用的方案。
7)磁力锚固法
如图7所示,磁力锚固法是指针对一些具有铁磁性金属表面的岩石层,可以利用磁力实现登陆器的锚固,在登陆腿上安装有电磁锚,在清除风化层后利用电磁铁吸附将登陆腿固定在小行星表面。这种方法简单可靠,可重复利用,但是一般适用于铁磁性材质的小行星,并且由于小行星表面温度变化剧烈,磁力也会有变化,这种锚固方法的可靠性和稳定性需要进行研究。
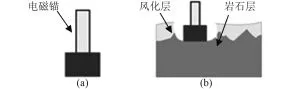
图7 磁力锚固法示意图Fig.7 Diagram of the magnetic force based anchoring method
8)仿生吸附手抓锚固法
如图8所示,仿生吸附手抓锚固法是指采用具有纳米吸附脱附材料的机构,吸附于光滑岩石表面或抓于非光滑的岩石表面,类似于受壁虎等动物启发而制作出的爬壁机器人[23]。该锚固方法简单可靠,可以重复利用,但是需要针对小行星表面特殊材质设计相应的吸附机构,而且小行星表面没有大气,需要研究在没有大气以及极端温度环境下的吸附,其可靠性有待深入研究。
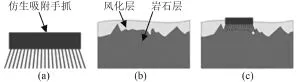
图8 仿生吸附手抓锚固法示意图Fig.8 Diagram of the anchoring method by using the bio-inspired adsorption pads
9)液体凝固锚固法
如图9所示,液体凝固锚固法是指通过液体浸入风化层接触岩石层,其凝固后将风化层、登陆腿和岩石层固结为一体,从而达到锚固的效果,在登陆器起飞离开时可以将登陆腿上的套筒机构抛弃,或者通过加热等方法将凝固体熔化[24],因此该方案可以重复使用,该方案简单可靠,锚固过程不需要推进器的推力,但是要找到具有合适的凝固温度的液体,也需要了解小行星表面的环境温度变化规律等。
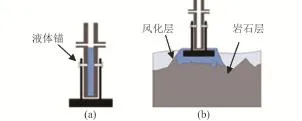
图9 液体凝固锚固法示意图Fig.9 Diagram of the anchoring method by concreting of liquid
10)切割锚固法
如图10所示,切割锚固法是在登陆腿上安装有切割片,在风化层去除后,利用推进器的喷气推力为登陆器上的锚固系统提供切割所需要的力和力矩,通过控制切割片以一定的倾角切入岩石层,几条登陆腿同时收紧,即可达到锚固登陆器在星体表面的目的。切割锚固法的优点是效率高,可靠性好,可用于各种硬度的岩石切割,适用范围广,且可以重复使用,缺点是切割运动的驱动和控制系统复杂。
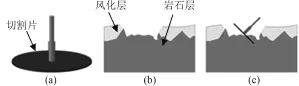
图10 切割锚固法示意图Fig.10 Diagram of the anchoring method based on cutting
以上十种锚固方案在实际应用中往往都有局限性,要实现登陆器在小行星表面的软着陆和刚性固定,实现可靠的附着锚固,需要结合几种方案,如在软着陆前采用可伸缩倒刺钻钉锚固法,在登陆接触小行星表面后采用钻孔或切割锚固法。此外还要根据载人小行星探测任务的需要,比如探测器规模、是否与星体表面行走作业综合考虑设计、锚固方案的效率、锚固系统质量、锚固力和力矩等来确定最终方案。
4 基于3R机械臂的切割锚固系统
在上面小行星表面附着可行性方案研究的基础上,发现切割锚固法几乎可能适用于各种硬度的岩石表面,通过初步桌面试验研究得知切割法比钻取法效率高,所需要推力也较小,此外切割法也可以用于岩石切割取样系统设计,因此这里对切割锚固法进行深入研究。
假设登陆器通过位置姿态控制已经降落在小行星较为平坦的局部表面,并且假设登陆器上的推进器可以提供锚固所需要的平衡力和力矩,这里我们先不考虑反弹等情况,只对切割锚固法的可行性进行初步研究。本文设计了一种基于3R机械臂驱动控制的切割锚固系统,通过机械臂的运动控制实现切割片的切割运动。
4.1 系统设计
基于切割锚固法的系统组成如图11,该系统由登陆器舱体、登陆腿、锚固腿、切割片、控制系统、驱动系统和电源模块组成。设计的系统三维模型图如图12所示,由于切割运动是一个平面运动,采用多转动关节切割腿要实现切割片的平面切割运动驱动控制,经过分析至少需要三个转动关节自由度,因此锚固腿被设计成一种3R机械臂,其安装在登陆腿靠近地面位置,切割片安装在锚固腿末端位置。3R机械臂的三个关节分别通过具有自锁功能的涡轮蜗杆减速器驱动的三个直流电机驱动,切割片由高速直流电机驱动。

图11 基于切割锚固法的系统组成Fig.11 Components of the anchoring system based on cutting method
4.2 建模与仿真
单锚固腿切割xoy坐标平面内运动模型如图13所示,三个连杆的质量mi、转动惯量Ii,以及尺寸参数如图所示,切割片的半径为R,切割片与水平面夹角为α。各个部分的质心位置如式(1):
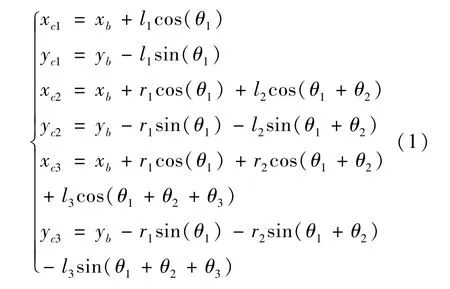
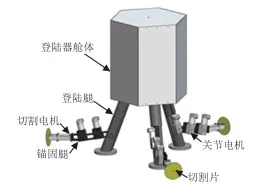
图12 基于切割锚固法的验证系统三维模型Fig.12 3D Model of the validating system based on cutting anchoring method
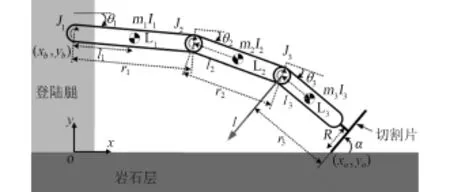
图13 单腿切割运动模型Fig.13 Model of one leg system for cutting operation
由式(1)可以得到三个连杆质心的速度。基于拉格朗日功能平衡法可以得到式(2)所示系统的动力学模型:
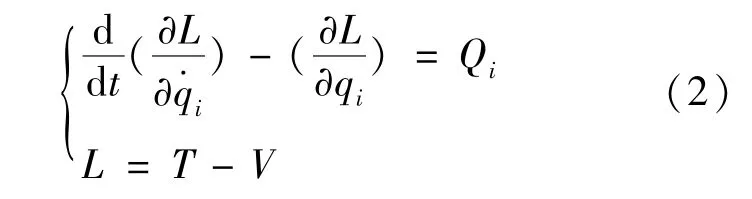
其中T为系统的动能,V为系统的势能,L为拉格朗日函数,qi=[θ1,θ2,θ3]为广义坐标,Qi为三关节的驱动力矩。由(2)可以得到二阶微分方程组,解方程组得到三关节的角度变化量,对角度进行控制即可实现切割运动控制。
在建模的基础上,进行了仿真研究,仿真的参数为:r1=0.075 m、r2=0.075 m、r3=0.155 m、l1=0.0375 m、l2=0.0375 m、l3=0.0775 m、m1=0.32 kg、m2=0.32 kg、m3=0.25 kg、I1=6.0× 10-4kg·m2、I2=6.0×10-4kg·m2、I3=0.002 kg·m2,切割片半径R=0.03 m。仿真初始条件为:α=60°、θ10= -30°、θ20=42.80°、θ30=17.20°。设置切割深度为2 cm,并设置切割深度匀速变化。基于Matlab(ode45)解微分方程组进行仿真研究,单腿切割运动过程中三关节角度变化的杆状图如图14所示,可以看到通过控制三关节的运动,切割片在一个平面内部运动。切割片在平面内匀速运动的位置变化曲线如图15(a)所示,三个关节的转动角度变化如图15(b)所示,三关节角度变化较为平缓,能够通过拟采用的关节驱动电机实现运动控制。
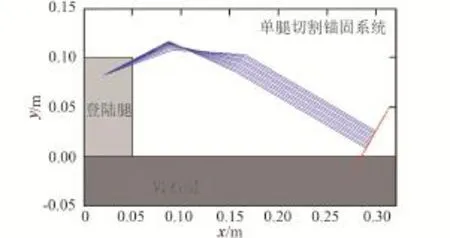
图14 单腿切割运动仿真结果Fig.14 Simulation result of one leg system for cutting operation
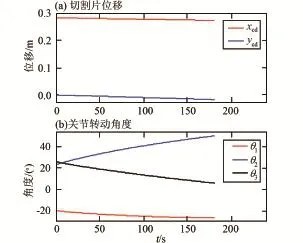
图15 单腿切割运动过程切割片位移和关节角度变化试验结果Fig.15 Experimental results of the cutting disk’s displacement and the three joints’angles during one leg cutting process
4.3 试验验证
在仿真研究的基础上,为了进一步验证切割方案的可行性,加工了单腿切割系统。选用的切割电机为Maxon RE25,关节电机是一种带有涡轮蜗杆减速器的直流电机,选用了阿尔泰四轴运动控制卡USB1020实现对三个关节电机和一个切割电机的控制。搭建的试验系统在一种莫氏硬度约为7.0的花岗岩石板上进行了切割试验研究。试验结果如图16所示,系统在约为180s完成了深度为15 mm的切割运动,切割过程中石板对切割片竖直方向的反力如图17所示,其不断增大,最大值约为3.4 N,试验结果表明,在推进器提供大约10 N的推进力情况下,在180 s内,三条腿即可同时切割石板实现锚固作业。试验结果验证了切割锚固方案的可行性。

图16 单腿切割花岗岩石板试验结果Fig.16 Experimental result of the one leg cutting on a granite board
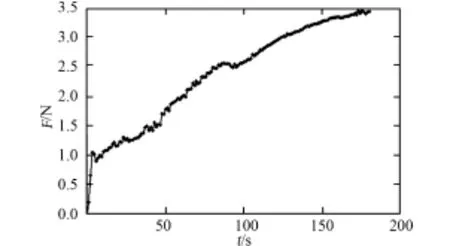
图17 单腿切割过程花岗岩石板反力Fig.17 Reaction of the granite board during the one leg cutting process
后续研究将利用六维力-力矩传感器搭载测试系统实现三腿切割锚固过程动态力特性的测量,从而了解岩石反力等信息,为登陆器所需要的推进器系统设计提供数据,如推进力-力矩信息和推进时间;实现登陆器系统锚固力的测试,为小行星表面移动作业支撑系统设计提供支撑;此外为模拟小行星表面微重力环境,设计登陆器在竖直墙面上进行锚固的样机系统,并进行试验研究。
5 结论
本文针对小行星表面附着锚固的难题,分析了附着约束条件,在此基础上将附着锚固分为两步:第一步对风化层和碎石层进行清除;第二步实现登陆器在小行星表面的刚性锚固。为此,提出了基于吹气法、喷水法、清扫法和刮削法四种风化层和碎石层去除方案,提出了十种岩石层刚性锚固方案,这十种方案各有优缺点,在我国小行星探测任务中可以根据小行星的地质特性选用几种方案组合使用。对一种基于切割锚固法的方案进行了系统设计、建模与仿真,以及试验研究,仿真和试验结果表明该方案可以在短时间内切割进较深的岩石层,工作效率高,并可适用于高硬度岩石层的锚固。
(
)
[1]Muirhead B K,Brophy J R.Asteroid Redirect Robotic Mission feasibility study[C]//Aerospace Conference,2014 IEEE.IEEE,2014:1-14.
[2]Des Marais D J,Nuth III J A,Allamandola L J,et al.The NASA astrobiology roadmap[J].Astrobiology,2008,8(4): 715-730.
[3]Muirhead B K,Brophy J R.Asteroid redirect robotic mission feasibility study[C]//Proceedings of IEEE Aerospace Conference,2014:1-14.
[4]NASA Asteroid and Comet Watch[EB/OL].http://www.nasa.gov/mission_pages/asteroids/main/index.html.
[5]Kubota T,Sawai S,Hashimoto T,et al.Robotics and autonomous technology for asteroid sample return mission[C]//Advanced Robotics,2005.ICAR 2005.Proceedings.,12th International Conference on.IEEE,2005:31-38.
[6]Kubota T,Otsuki M,Hashimoto T.Touchdown dynamics for sample collection in Hayabusa mission[C]//Robotics and Automation,2008.ICRA 2008.IEEE International Conference on.IEEE,2008:158-163.
[7]Ulamec S,Espinasse S,Feuerbacher B,et al.Rosetta Lander—Philae:Implications of an alternative mission[J].Acta-Astronautica,2006,58(8):435-441.
[8]Sierks H,Barbieri C,Lamy P L,et al.On the nucleus structure and activity of comet 67P/Churyumov-Gerasimenko[J].Science,2015,347(6220):aaa1044-1-aaa1044-4.
[9]Capaccioni F,Coradini A,Filacchione G,et al.The organicrich surface of comet 67P/Churyumov-Gerasimenko as seen by VIRTIS/Rosetta[J].Science,2015,347(6220):aaa0628-1-aaa0628-4.
[10]Mission to Bennu[EB/OL].http://www.asteroidmission.org/.
[11]Tsuda Y,Yoshikawa M,Abe M,et al.System design of the hayabusa 2—asteroid sample return mission to 1999 ju3[J].Acta Astronautica,2013,91:356-362.
[12]Steltzner A D,Nasif A K.Anchoring technology for in situ exploration of small bodies[C]//Aerospace Conference Proceedings,2000 IEEE.IEEE,2000,7:507-518.
[13]王开强,张柏楠,王悦,等.载人小行星探测的任务特点与实施途径探讨[J].航天器工程,2014,23(3):105-110.Wang kaiqiang,Zhang Bainan,Wang Yue,et al.Characters and Technological Approach of Human Asteroid Exploration Mission[J].Spacecraft Engineering,2014,23(3):105-110.(in Chinese)
[14]Coradini A,Capaccioni F,Erard S,et al.The Surface Composition and Temperature of Asteroid 21 Lutetia As Observed by Rosetta/VIRTIS[J].Science,2011,334(6055):492-494.
[15]Mueller,T G,Metcalfe,L.ISO and Asteroids[J].European Space Agency(ESA)bulletin,2001,108:38-48.
[16]Sipila,S A,Scoville,Z C,Bowie,J T,et al.Extravehicular activity asteroid exploration and sample collection capability [C]//13th International Conference on Space Operations.2014:1-11.
[17]Bottke Jr W F,Cellino A,Paolicchi P,et al.Asteroids III [M].University of Arizona Press,Tucson,2002:585-599.
[18]Badescu V.Asteroids:Prospective Energy and Material Resources[M].Springer,2013:298-299.
[19]Fujiwara A,Kawaguchi J,Yeomans D.K.et al.The Rubble-Pile Asteroid Itokawa as Observed by Hayabusa[J].Science,2006,12(5778):1330-1334.
[20]Hand,E.Comet close-up reveals a world of surprises[J].Science,2015,347(6220):358-359.
[21]Hand,E.Philae probe makes bumpy touchdown on a comet [J].Science,2014,346(6212):900-901.
[22]Parness A,Frost M,Thatte N,et al.Gravity-Independent Mobility and Drilling on Natural Rock Using Microspines [C]//Robotics and Automation,2012.ICRA 2012.IEEE International Conference on.IEEE,2012:3437-3342.
[23]Murphy M P,Kute C,Mengüç Y,et al.Waalbot II:Adhesion Recovery and Improved Performance of a Climbing Robot using Fibrillar Adhesives[J].The International Journal of Robotics Research,2011,30(1):118-133.
[24]Badescu V.Asteroids:Prospective Energy and Material Resources[M].Springer,2013:306.
Study on Surface Anchoring Methods of Asteroids Lander
ZHANG Jun1,FANG Baodong2,3,LU Xi2,3,SONG Aiguo1,LI Song1,ZHOU Bilei2,3,XU Liang2,3
(1.School of Instrument Science and Engineering,Southeast University,Nanjing 210096,China;2.Shanghai Institute of Satellite Engineering,Shanghai 200240,China;3.Shanghai Key Laboratory of Deep Space Exploration Technology,Shanghai 200240,China)
The microgravity environment of asteroids raises daunting challenges for attaching,moving,and operating on their surfaces.The anchoring of the lander during landing on the surface of asteroids is a prerequisite in these missions.In order to solve this problem,the constraints for attaching on different kinds of surface conditions were studied and analyzed in this paper.Several possible methods for anchoring on the surfaces were proposed and their working principles,application conditions,advantages and disadvantages,and reusability were studied.The application of these methods in the practical conditions for stable anchoring was also analyzed.Based on these,through comparisons among these methods,a cutting based method was proposed for stable anchoring of the lander on the surface of asteroids.A prototype of the cutting based system was designed and fabricated.And the performance of the prototype was tested for validating the feasibility and effectiveness of the proposed method.Experimental results showed that the system could penetrate into about 15 mm deep in about 180s cutting on a granite board.
asteroids exploration;microgravity;surface attachment;anchoring method;cutting anchoring;3R manipulator
V476
A
1674-5825(2015)03-0270-08
2014-11-21;
2015-04-07
国家杰出青年基金(61325018);国家自然科学基金(61272379、61403079);载人航天预先研究项目(010104)
张军(1985-),男,博士,博士后,研究方向为仿生机器人。E-mail:j-zhang@seu.edu.cn