六自由度摇摆台检测方案设计
2015-12-07张宇深张立中孟立新周鑫弘李凤岩柳添耀
张宇深,张立中,孟立新,周鑫弘,李凤岩,柳添耀
(1.长春理工大学 机电工程学院,长春 130022;2.辽源市计量检定测试所,辽源 136200)
在现代激光通信实验中,由于试验场地环境因素的影响,如温度、大气、风力,使测量结果存在检测误差,对实验数据造成很大影响[1]。基于以上影响因素,在实验中通常构筑模拟实验台,运用模拟实验台进行激光通信的相关实验,在模拟实验中对影响实验结果的因素进行分析与评估,从而保证检测结果具有说服力,同时也确保了实验结果的准确性。
模拟实验台采用MG6-1E-XE-500型六自由度摇摆台。设备采用两级六连杆并联结构级联形式,底层采用六个电动缸连杆驱动,实现大范围低频运动。通过电动缸控制六个连杆的伸缩运动,并用虎克铰连接平台与连杆,实现动平台台面的位姿运动[2]。该摇摆台如图1所示。其技术指标主要分为:直线位移静态定位精度;空间六个自由度(俯仰、滚转、偏航、升降、纵移、横移)的单轴极限位移与组合位移、速度、加速度。
本次选用的六自由度摇摆台具有精度高、极限移动位移大等运动特性,同时具有一些技术指标,如平面度、速度、加速度等,不能直接获得检测结果的技术难点。因此本文针对以上运动特性与检测难点,设计了一种基于激光跟踪法的检测方法,对实验总体方案进行了设计,并进行了检测系统的误差分析,最后通过实验验证检测方法的可行性。

图1 六自由度摇摆台
1 检测系统总体方案设计
针对六自由度摇摆台的技术指标及其运动特性,检测系统总体方案如图2所示。
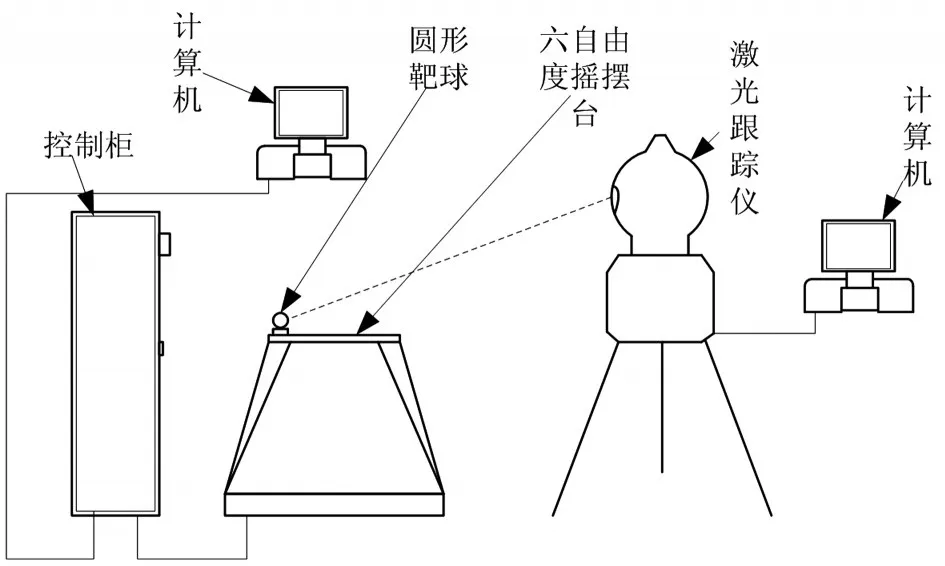
图2 六自由度摇摆台的检测系统方案
检测系统总体方案是运用了激光跟踪法、包含绝对测距法的检测系统,因为激光跟踪法可以跟踪检测六自由度摇摆台、通过跟踪检测计算其速度与加速度,而绝对测距法优化了检测过程,且二者同时保证了检测精度,可以解决六自由度摇摆台在检测时遇到的检测难点,具有对六自由度摇摆台技术指标检测的能力。
1.1 激光跟踪法的检测原理
激光跟踪法是一种能够准确的进行自动跟踪测角和自动跟踪测距的三维坐标检测方法。它的优点是可以持续不断的瞄准、跟踪反射回来的激光束,同时确定SMR的位置。
激光跟踪法的检测原理是在被测目标上安置反射靶球,激光跟踪头射出的激光束,经反射靶球反射一次后原路返回至跟踪头。当反射靶球位置改变时,跟踪头处的出射光线为了保证光路连接,将根据反射靶球的位置调整激光跟踪头的方向。而反射光线将被检测系统接收,并根据反射光线的位置推算反射靶球所在的空间坐标。
而激光跟踪法的空间位置测算是基于极坐标检测原理进行,如图3所示。反射靶球所反映的位置是由反射光线与地面的水平角α、地面垂向方向的夹角β和反射靶球与跟踪头的距离S决定的。

图3 激光跟踪法基于极坐标法的坐标系
将图3转换为直角坐标系:

其中反射靶球到跟踪头的距离S是利用激光干涉法或者绝对测距法测出,水平角α和垂直角β可以由精密角度解码器测得[3]。
1.2 绝对测距法的检测原理
绝对测距法是在反射光路上放置一个齿轮,当齿轮高速旋转时,计算光束发出到接收时旋转过的齿轮数,可得到激光束的总时间t,由于光速已知,则可由式(1)求出距离S:
其中c为光速,这种检测距离的原理被称作Fizeau齿轮原理。
如果激光光路出现断光现象,传统的测距方法必须终止实验,调整光路并重新连接,才能继续进行检测,然而绝对测距法出现断光现象时,不需要终止检测,可以保持反射靶球静止,通过激光器发出的激光束寻找靶球的位置,继续进行检测实验。
1.3 基于激光跟踪法的检测系统组成及其特点
通过上文对激光跟踪法与绝对测距法进行原理分析后,结合六自由度摇摆台系统总体方案,经过调研,选定激光跟踪仪作为六自由度摇摆台的检测仪器。
激光跟踪仪的主要部件有以下几部分组成[4],如图4所示。

图4 激光跟踪仪的组成元件
激光跟踪仪相对于其它检测设备,具有显著的功能:
(1)误差补偿功能
由于六自由度摇摆台工作环境的特殊性,工作环境会对检测仪器的精度产生影响,所以检测系统必须考虑误差补偿。该系统选用的激光跟踪仪能够实现误差快速补偿,确保检测系统能够提供高精度的检测水平。
(2)激光随开即用功能
该检测系统选用的激光跟踪仪具有快速、智能预热的功能,能够极大的缩短检测的准备时间,提高检测效率。
(3)快速定向功能
激光跟踪仪内部集成了精密的电子水平装置,能够快速的确定激光跟踪仪及靶球的方向,实现快速检测。
2 激光跟踪仪检测系统误差分析
对六自由度摇摆台进行检测的时候,由于检测仪器本身会存在误差,周围的环境也会对检测系统产生一定的影响,比如温度、湿度、甚至气压都会对检测结果产生一定的影响。而误差会影响检测的真实性与准确性,无法获得正确的检测结果[5]。所以要对检测系统进行误差分析。
本次检测所采用的激光跟踪仪,仪器自身的内部系统相对比较复杂,影响精度的误差源也比较繁多。通过对激光跟踪仪的检测环境和仪器自身精度,激光跟踪仪检测系统的误差源主要分为以下几种:反射器误差、基准波长误差、激光频率再现性误差、基准距离误差、空气参数误差、环境干扰误差与空程误差。
2.1 反射器误差
激光跟踪仪检测系统使用的逆反射器是球形固定反射器(SMR)。SMR是高精密的光学器件,对提高光学测距仪器的量程能够起到很大的作用。SMR的光学原理是:进入SMR的光线,在经过SMR内部三个直角面的两两反射后,会分成因为反射顺序不同的六束光线,理想状态下,这六束光线将合并成一束光线并原路返回,且与入射光线平行。实际上由于材料不均且直角面的面型凹凸不平,反射器会存在一定的误差。
光线在SMR中的光程为:
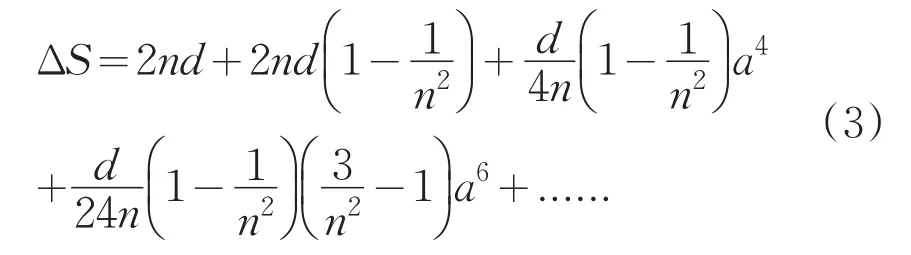
其中,n为SMR折射率,α为光线入射角,d为SMR的直径。
由(3)式可知当入射光线的角度不同时,光线在入射和出射SMR的光程也不相同。当a≠0时,附加光程差为:

当取n=1,δΔSa=0时,入射角对光程不产生误差附加影响,也是SMR采用空心角锥棱镜的原因。
在激光跟踪检测中,由于被检测仪器的位置变化,入射光线会从各个角度进入SMR,给检测系统带来变化误差δa,SMR的误差还包括球度误差δb,棱镜与球座的光学对中误差δc,球体直径误差δd,镜头平整性误差δe,二面角误差,定点位置及偏振特征等[6]。综合得到反射角误差为:

在本次设计的检测系统中,激光头发出的光线入射角小于20°,通过大量实验表明,当入射角为±20°时,反射角的误差可以控制在0.01mm以内。
2.2 基准距离误差
激光跟踪仪基准距离由自标定得到,不同的反射器会对应不同的基准距离,标定误差也会出现偏差。本次选用的SMR,它的基准距离为187mm,由此可得基准距离误差会在±0.005mm以内。
2.3 基准波长误差
在光学检测中,检测的基准是光束的波长,它由光束频率来确定。而光束的频率不是一成不变的量,它的随机变化会对检测精度造成影响。用阿伦方差表示为:

式中,f—激光标称频率,Δf—经测量得到的频率差,N—取样频率个数。一般情况下基准波长的误差稳定度为10-8~10-9量级,属于比较微小的误差。
2.4 激光频率再现性误差
激光频率的长期再现性是比短期稳定性更加值得关注的性质,检测系统会因为它造成一定的影响。当一个激光器闲置时间过长,它的中心频率会与它的初始频率产生偏差,但它的其他的性能指标却没有发生改变,引起检测时的激光频率的误差。频率再现性用R表示为:

式中,Δv0为中心参考频率v0的改变量。
激光器频率的再现性通常情况下为(3~5)×10-8,但由于激光器的频率再现性,必须对发出的光束波长进行定期偏移检测,以保证其准确度。至于如何解决,可以送至国家计量院进行修正,也可以采用激光干涉仪进行检测比对,对其波长进行确认。本次选用的激光跟踪仪在校准数据的时候可以刷新波长参数,测距时自动进行校准,误差可忽略不计。
2.5 空气参数误差
空气折射率影响波长变化,进而影响检测系统精度,当空气的参数发生改变时,一般会用Edlen公式对其进行修正得:

式中,(n -1)x为标准空气折射率尾数,(n -1)tpf为实际环境下的空气折射率尾数,σ=1/λ,对Edlen公

并带标准的空气参数t=20°C,p=101325pa,f=1333.22pa得:

式(12)就是温度、气压、湿度偏差对折射率产生的修正量。
2.6 环境干扰误差
温度、阳光、空气扰动、被测物稳定性、地面的震动,这些因素都对激光跟踪仪的检测造成一定的影响,在检测之前一定要确定误差的大小。大量的实验数据表明,当温度变化±3°C时,检测误差的变化多达10~20μm。显然空气受热对检测造成了比较大的影响。因此在检测过程中要避免阳光直射,避免靠近热源,尽量保证检测环境的稳定,误差可以忽略不计。
2.7 空程误差
如图5所示,当跟踪仪的反射器位于基点位置时,检测光路与参考光路之间会存在着光程差。由于检测过程中环境的改变会引起空气折射率的改变,使本应该射向检测原点的光路发生偏差,导致零位偏差,进而出现空程误差。式进行微分计算得:空程误差由折射率变化、几何长度变化和激光波长稳定性三部分组成。计算公式表示为:

图5 空程误差示意图

其中Lm为检测光路的距离,Lc为参考光路距离。
设基点处距离差Lm-Lc=400mm,在检测时间内,折射率的变化与环境参数的变化有关,设为μn,忽略Lm-Lc的变化,λ0的稳定性设为μλ,一般10-8量级,μn与μλ均属于随机误差,则:

假设在标准的空气状态下,温度波动为±0.5°C,气压波动为±10Pa,湿度波动由于很小可以忽略,激光频率稳定度为10-8,则 μn2=2169.54×10-16,空程误差为:

通过上述误差分析,可得检测系统的检测误差最大值为10.27μm。
通过上述误差分析可知,反射器误差是对激光跟踪仪检测系统影响最大的系统误差,而基准距离误差、基准波长误差、激光频率再现性误差、空气参数误差、环境干扰误差、空程误差6个系统误差的影响相对较小,但不能完全忽视。所以我们在检测实验进行时要着重考虑反射器误差,在计算时应将其去除以保证检测精度;并尽量保证检测环境不变,同时选择相对稳定的检测地点和相对良好的天气进行检测实验,以避免检测系统受到干扰导致检测误差值增大。
3 实验验证
3.1 检测X,Y,Z轴静态位移精度与极限位移
检测过程:将SMR放置于六自由度摇摆台运动台面中心处,开启六自由度摇摆台控制系统,定义台面中心位置为起点,利用激光跟踪仪记录SMR的位置,记做初始位置。然后控制摇摆台动平台分别至X,Y,Z轴正向与负向极限线位置,以及三个自由度组合而成的极限位移组合。当平台台面停稳后用激光跟踪仪记录SMR位置检测其极限位移与位移精度。通过摇摆台的归零按钮移动回初始位置,完成检测。
3.2 检测绕X,Y,Z轴偏转极限角度与偏转精度
检测过程:将SMR放置在六自由度摇摆台运动台面非旋转轴的极限位置处,定义向右旋转为正值,向左旋转为负值。开启六自由度摇摆台控制系统,定义台面中间位置为起点,用激光跟踪仪记录SMR的位置,记做初始位置。然后控制摇摆台平面分别绕X,Y,Z轴进行偏转,以及三个轴组合而成的偏转极限角度。当平台台面停稳后用激光跟踪仪跟踪SMR,检测其极限偏转角度与偏转精度。通过摇摆台的归零按钮移动回初始位置,完成检测。
检测结果如表1、表2所示。

表1 静态线位移检测结果

表2 静态角位移检测结果
通过以上数据,检测结果满足六自由度摇摆台的技术指标。
4 结论
本文根据六自由度摇摆台的技术指标,确定了基于激光跟踪法的检测系统,计算了激光跟踪法检测系统误差,最后通过实验数据,得出满足六自由度摇摆台精度指标的检测结果,验证了检测方法的可行性。
[1]黎启柏,朱建辉.三自由度平台电液比例比环控制系统[J].液压与气动,2002(4):19-21.
[2]丛大成,于大泳,韩俊伟.Stewart平台的运动学精度分析和误差补偿[J].工业设计学报,2006,13(3):162-165.
[3]Kang C G.Closed-form force sensing of a 6-axis force transducer based on the stewartplatform.Sensor and actuators[P].2001(90):1-37.
[4]FARO激光跟踪器用户手册[M].北京,FARO公司,2003:9-13.
[5]毛英泰.误差理论与精度分析[M].北京,国防工业出版社,1982:82-85.
[6]王彦.激光跟踪仪测量系统校准技术研究[J].测试技术,2003(3):37-39.
