一种高稳定性次镜支撑结构的优化设计
2015-12-07李文岩颜昌翔
李文岩,颜昌翔
(中国科学院长春光学精密机械与物理研究所,长春 130033)
随着人们对光学系统分辨率要求的提高,空间光学设备越来越向长焦距、大口径方向发展[1]。目前同轴卡塞格林形式的光学系统应用比较成熟[2,3]。随着口径的增大,次镜与主镜之间间距变大,次镜支撑系统刚度变低,次镜相对主镜的位置精度对光学系统的成像质量影响较大。因此,设计合理有效的次镜支撑结构至关重要[4]。
空间光学系统中较常用的主、次镜间支撑结构有桁架式、薄壁连接筒式、连接筒与支撑杆组合式等。桁架式结构适合于长焦距光学系统,具有质量轻、比刚度高等优点,在国内外光学设备中应用广泛;薄壁连接筒式结构由于结构形状规则,大大简化了加工和安装调试过程,在小型光学设备中应用广泛[5,6];连接筒与支撑杆组合式结构不但结构稳定、动态刚度好,同时具有方便加工,装调过程简单等特点。在光学系统通光口径相同的条件下,在系统尺寸和整机质量方面,连接筒支撑杆组合结构相对其他两种结构稍有优势,因此也得到了广泛的应用。
本文以激光通信系统为例,对主次镜间连接筒和支撑杆组合式支撑结构进行了设计,并通过工程分析对设计的可行性进行了验证。
1 设计
1.1 次镜支撑结构方案对比
激光通信天线系统作为信号光接收和发射的通道,在激光通信系统中至关重要。图1为天线部分主镜、次镜相对位置关系示意图。其中主镜、次镜轴向距离为270mm,并要求次镜与主镜之间的X方向和Y方向的角度位置变动量均不超过20”,这是保证跟踪精度的关键环节,也是次镜支撑组件质量的衡量指标。
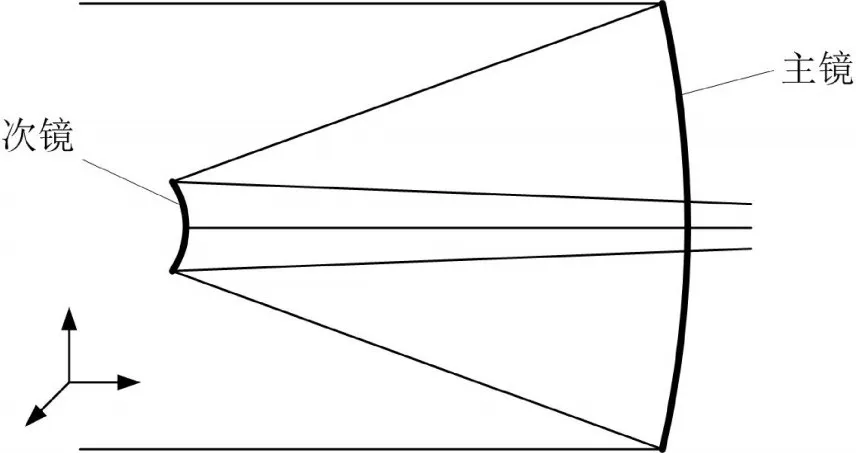
图1 天线主次镜位置关系图
通信天线的光学系统形式为同轴卡塞格林系统,常用的次镜支撑结构为桁架式支撑以及连接筒与支撑杆组合支撑。
桁架式支撑结构通过多根桁架杆与主、次镜连接件之间构成三角形,增加了结构的稳定性和刚度。但与此同时,多杆桁架结构也带来了整机重量的增加以及遮拦比的增大。所以本文从整机尺寸和质量的角度出发,选择连接筒与支撑杆组合形式。相比之下,连接筒的重量可以通过轻量化进行控制,并配合适当形式的连接杆,可以有效地实现次镜的合理支撑。
1.2 材料的选择
空间光学设备中适用于次镜支撑结构的材料有以下几种。钛合金材料,其比刚度高,密度小,是最常用的航天材料之一;殷钢,其具有很大的弹性模量值,热膨胀系数可以根据光学件材料匹配选择,具有很好的环境适应性,是次镜支撑结构很好的选择;碳纤维复合材料,热胀系数可以设计,且具有比刚度大,热畸变小等特点,但是价格昂贵也是碳纤维复合材料需要考虑的因素。综合考虑材料的性能,本结构选择殷钢作为次镜支撑结构的材料。
1.3 连接杆的设计
同轴结构的光学天线常用的次镜连接杆主要有三杆式、四杆式以及多杆式等几种结构形式,由于多杆式结构会造成系统遮拦面积过大,所以三杆式和四杆式更为普遍[7]。为了满足主镜和次镜的尺寸支撑需要并提高连接杆沿光学系统轴线方向的刚度,连接杆通常与光学系统轴线呈一定角度。图2为三杆式和四杆式次镜支撑结构的一阶振型分析结果图,对比结果如表1所示。
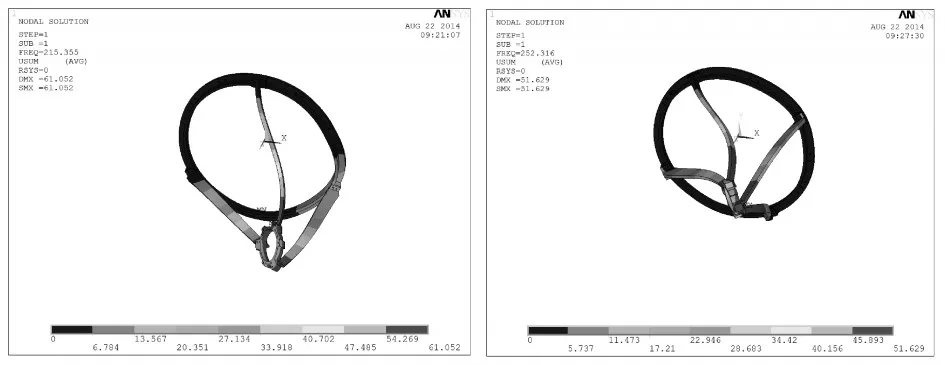
图2 三杆式与四杆式次镜支撑结构一阶振型对比图
由表1可以看出,三杆式结构的一阶频率比四杆式结构低6.7%;次镜在重力方向上的位移方面,三杆式比四杆式低2.7%;次镜的扭转角度方面,三杆式比四杆式低8.0%,遮拦面积方面,三杆式比四杆式低39.3%。通过以上对比可以看出,四杆式结构在增加了系统的遮拦面积和重量,降低成像质量的同时,一阶频率、次镜位移以及次镜的扭转角度等方面并没有明显改善。因此本系统选用三杆式次镜支撑结构。
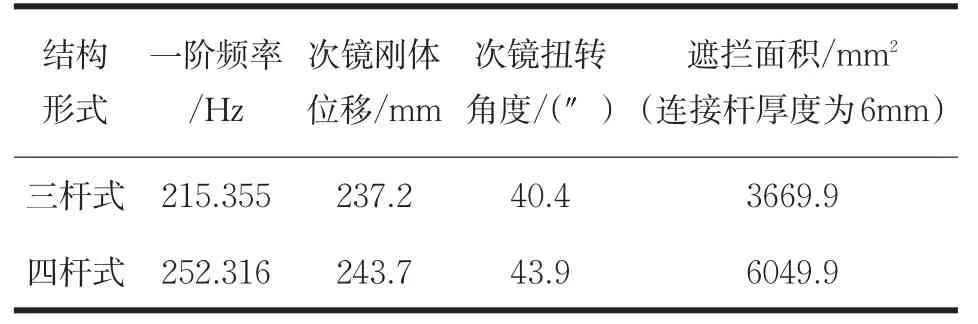
表1 三杆式与四杆式次镜支撑结构一阶振型对比
为了减小系统的中心遮拦面积,提高成像质量,支撑杆的厚度往往很小。这样,每根连接杆在厚度方向的振动频率很低。本设计在连接杆厚度方向进行部分轻量化,使得连接杆在减轻重量的同时,增强了厚度方向的刚性,提高了厚度方向的振动频率。
图3为轻量化前后三杆式次镜支撑结构的一阶振型分析结果图,对比结果如表2所示。
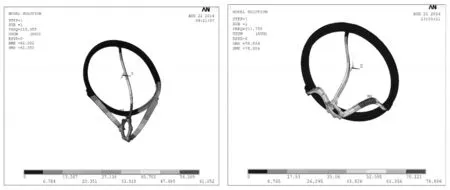
图3 连接杆轻量化前后次镜支撑结构的一阶振型对比图
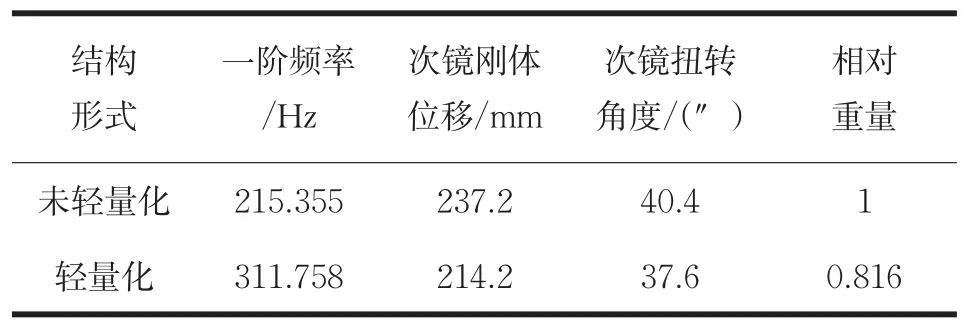
表2 连接杆轻量化前后次镜支撑结构的一阶振型对比
由表2可以看出,轻量化的三杆结构比未轻量化的结构一阶频率提高了44.8%,提高刚性的同时重量方面也有所降低。因此,本设计采用轻量化的三杆式次镜支撑结构。
1.4 支撑结构的设计
为了保证主镜与次镜之间的相对位置关系,本设计采用主镜室固定主镜。为了提高次镜的面型精度,次镜与柔性镶嵌件胶接并与三杆式次镜支撑结构安装固定。次镜支撑结构安装在主镜室端面上。
2 分析
2.1 建立有限元模型
为了保证有限元分析结果更加准确,有限元模型须根据实际尺寸构造,载荷及约束合理等效的同时,尽量保证网格细密。图4所示为本设计的三维有限元模型。模型采用六面体网格划分方式以保证分析的准确性。在体之间的连接方面,采用节点刚度耦合的方式合理等效螺纹连接,以保证结果接近实际值。

图4 次镜支撑结构的有限元模型
2.2 分析结果
2.2.1 镜面精度分析
在太阳光辐射下系统的温度变化和不同方向的重力作用将对支撑结构及镜面精度产生影响[8]。表3所示为5oC温升以及三个方向重力作用对次镜精度的影响。由表可知,次镜与主镜之间的相对位置关系变化很小,能够满足设计要求。
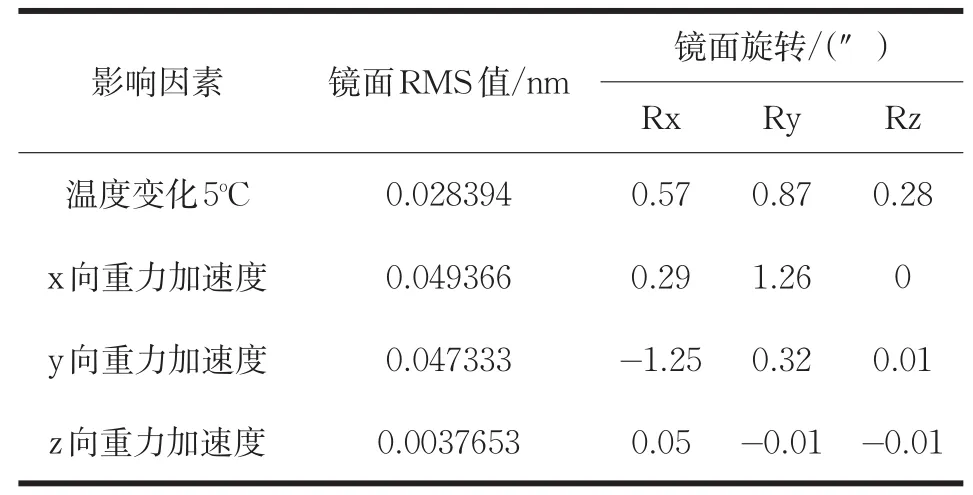
表3 温度变化和三个方向重力作用对次镜镜面精度的影响
2.2.2 模态分析
表4所示为次镜支撑系统的整体模态分析结果,其一阶振型结果如图5所示。可以看出,次镜支撑系统整体一阶基频高于300Hz,能够满足设计要求。
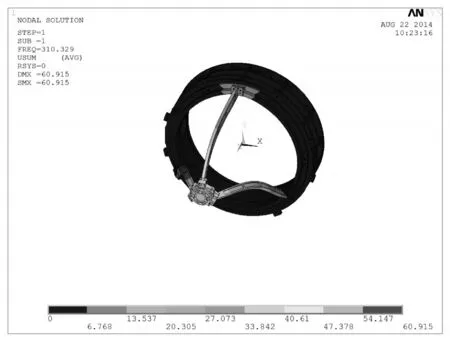
图5 次镜支撑系统整体模态分析结果图
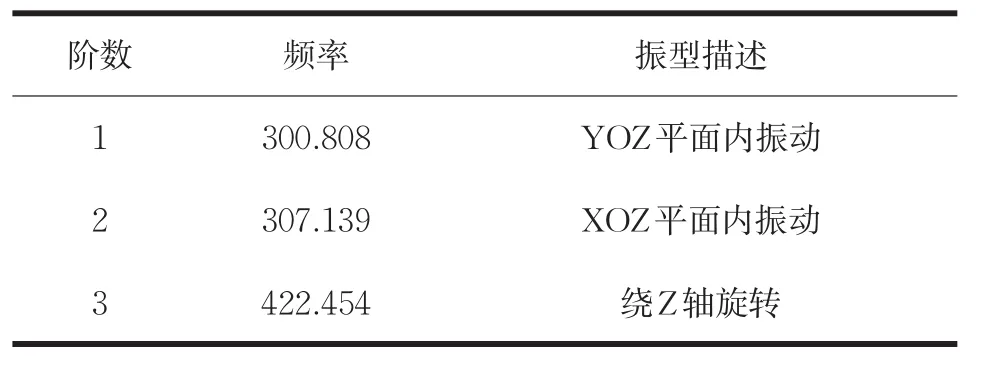
表4 次镜支撑系统模态分析结果
3 结论
在空间激光通信终端中,次镜与主镜的相对位置关系对于整体光学系统的成像质量至关重要,而次镜支撑结构是保证这一关系的关键部件。本文根据实际应用情况,通过方案对比和分析论证,设计了符合光学系统的激光通信终端次镜支撑结构的形式。以有限元分析为基础对结构进行了详细设计,并讨论了系统温度变化,重力等因素对支撑结构的影响,验证了设计的合理性。
[1]刘磊,高明辉.空间大口径望远镜可展开式反射镜单元镜支撑技术[J].光学精密工程,2005,13(3):127-134.
[2]陈荣利,张禹康,樊学武,等.空间高分辨率CCD相机次镜支架最佳结构设计[J].光子学报,2004,33(10):1251-1254.
[3]王富国,张景旭,杨飞,等.四翼梁式次镜支撑结构的研究[J].光子学报,2009,38(3):674-676.
[4]张雷,金光.同轴轻型空间遥感器支撑桁架的设计与试验[J].光学精密工程,2010,18(5):1099-1104.
[5]李志来,薛栋林,张学军.长焦距大视场光学系统的光机 结 构 设 计[J].光 学 精 密 工 程 ,2008,16(12):2485-2490.
[6]程景全.天文望远镜原理与设计[M].北京:科学技术出版社,2003:103-104.
[7]李威,刘宏伟.空间光学遥感器中碳纤维复合材料精密支承构件的结构稳定性[J].光学精密工程,2008,16(11):2173-2179.
[8]吴清文.镜面面形误差的曲面方程处理方法[J].光学精密工程,1998,6(6):56-60.
