基于TrueTime的网络控制系统设计与仿真
2015-12-06蒋蓉蓉夏荣坤
蒋蓉蓉,夏荣坤,陈 亮
(安徽工程大学检测技术与节能装置省级重点实验室,安徽芜湖 241000)
互联网的发展给人们的生活带来了许多便利,沟通变得更加快捷。网络通信代替了点对点通信,网络控制系统(networked control system,NCS)应运而生。NCS以网络作为传输介质,完成传感器、控制器和执行器等系统各部件之间的信息交换[1]。正是利用这一特性,闭环回路系统中的各节点无需直接相连,NCS因此具有可远程控制、节约布线成本、各节点可独立维护、易于扩展等优点[2]。然而,由于网络的传输特性,时延、干扰等新问题不可避免,降低了系统的性能,严重时甚至导致系统失去控制,造成不可预计的后果。除了可优化网络环境,控制系统的控制器设计仿真研究也是NCS研究的一个重要方面。NCS的仿真设计能验证控制算法的有效性。目前,网络控制系统仿真软件包括 Matlab/Simulink、TrueTime、NS2、OPNET 等[3-4],种类繁多,但使用难易程度不同,功能也各有侧重。其中,TrueTime能与Matlab/Simulink结合使用,且自带多种协议和调度方案,直观简便,因此本文选用TrueTime作为仿真工具。
1 网络控制系统
网络控制系统是一种利用网络作为传输媒介来构成闭环回路的系统[5],是一种各节点呈分布式的反馈控制系统。网络控制系统分为有线网络控制系统(wire networked control systems,WNCS)和无线网络控制系统(wireless networked control systems,WiNCS)。图1是一个典型的NCS结构。由图1可知,网络控制系统的传输时延主要由两大部分组成,即 τk=τsck+τcak,其中:τsck为传感器到控制器的时延;τcak为控制器到执行器的时延[6]。

图1 网络控制系统典型结构
2 模糊PID控制设计
模糊控制可解决传统控制无法解决或解决效果不佳的问题。在NCS控制器设计中,被控对象包括物理节点和传输网络,其中传输网络比较复杂。模糊控制无需知道精确的系统数学模型,因此非常适合NCS控制器设计。但由于不具有积分环节,模糊控制器很难消除静态误差[7]。为了改善其稳态性能,可将模糊控制与PID控制结合,运用模糊推理,实现对PID参数的在线调节,补偿网络时延对系统的影响。在该方法中,PID调节器按无时延进行设计。模糊逻辑调节就是利用参考信号和被控对象输出间的误差来调节增益因子的值,使之作用于PID调节器的输出以达到补偿网络时延的目的。另外,在控制器设计过程中,并不需要网络时延等具体参数,这恰恰符合网络时延未知的特性。
模糊PID控制设计借鉴操作人员的经验和专家的知识建立适当的模糊规则表,根据实际情况自动调整PID的3个参数[8]。本文设计采用自适应模糊PID控制,控制器结构如图2所示。

图2 自适应模糊PID控制器结构
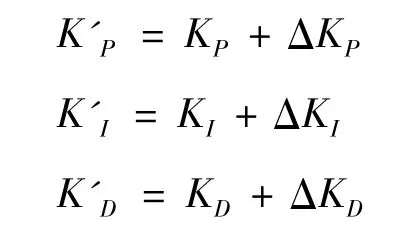
模糊PID控制器既具有模糊控制灵活且适应性强的优点,又具有PID控制器精度高的特点。由图2可知,先求出系统给定值与反馈值的误差e,然后计算误差变化率ec,将二者作为输入量,再将e和ec模糊化,选取模糊规则建立模糊规则表进行模糊推理(对KP、KI和KD三个参数进行修正,实时满足e和ec对PID参数自整定的要求),最终解模糊(重心法)得到修正后的PID参数[9]。KP,KI和KD的参数修正按下式计算:

在线运行过程中,控制系统通过对模糊逻辑规则结果的处理、查表和运算完成对PID参数的在线自校正。模糊PID工作流程见图3。
3 TrueTime结构及功能
在Matlab的command窗口中输入TrueTime,跳出如图4所示的窗口。仿真使用TrueTime1.5,包括6个模块,本文主要用到3个基本模块:内核模块(TrueTime Kernel)、有线网络模块(TrueTime Network)和无线网络模块(TrueTime Wireless Network)。

图3 模糊PID工作流程

图4 TrueTime1.5模块库
3.1 内核模块
内核模块用于构建网络控制系统中的各节点,例如控制器、传感器和执行器。它具有数/模和模/数(D/A和A/D)转换端口、网络接收和发送(rcv和snd)通道、中断通道(interrupts)、调度器(schedule)与监视器(monitors)接口等[10]。双击内核模块可对其进行设置。其中,Name of init function(MEX or Matlab)一栏填入对应的节点初始化函数即可初始化对应的内核模块(节点),函数可用Matlab或C++编写。
模块按照函数中定义的任务执行,以中断方式产生。内部中断与定时器相关连,定时器在规定时间或任务完成时触发;外部中断与模块的Interrupts相关连,当信号值改变时触发;当内外中断同时触发时调用预定义的中断句柄执行中断服务程序,中断句柄也可由代码函数实现[11-12]。在仿真程序运行时,内核执行与不同的任务相关联的代码函数,代码函数返回执行时间。
3.2 网络模块
有线网络模块用来模拟网络控制系统的有线网络,它包括数字信号接收(rcv)和发送(snd)接口、调度(schedule)显示接口,可以仿真有线网络的访问和传输过程。其中,接收和发送接口可扩充至多个接口。网络模块提供了可以设置的网络参数,如网络类型、网络节点数目、网络速率、最小帧长度、数据包丢包率等。其中,网络类型包括CSMA/CD、CSMA/AMP(带有优先级仲裁的载波侦听多路访问)、TDMA、FDMA(频分多路复用)、Round Robin(令牌总线)和 Switched Ethernet(交换式以太网)6 种[13]。
有线网络模块由事件驱动,需传输的数据包通常包括收发节点编号、data(如采样信息或控制律)、传送时间和实时特性(如优先级)。TrueTime预定义了 Rate-Monotonic(RM,单调速率)、Deadline-Monotonic(DM,截止期单调)、Fixed-Priority(FP,固定优先级)和 EarliestDeadlineFirst(EDF,最小截止期优先)调度[14]4种优先权调度策略。可以根据需要选用一个优先权策略,也可以自行编写优先权函数,灵活性较高。
无线网络模块和有线网络模块类似,但被用来模拟无线通信网络。该模块提供了IEEE 802.11b/g(WLAN)和 IEEE 802.15.4(ZigBee)两种网络类型。需要和有线网络模块区别的是,无线网络中存在连续的功率消耗,一旦模块的电池能源耗光,系统将会失去控制能力,因此在无线网络模块的初始化函数代码编写时要创建功率控制和功率响应任务[15]。
4 仿真设计与分析
4.1 WNCS仿真
有线网络控制系统仿真平台的被控对象选用倒立摆模型,其传递函数为

系统参考输入信号为单位阶跃信号,调度采用prioFP(固定优先级)策略,数据速率为1 000 000 b/s。
分别采用3个内核模块作为传感器、控制器和执行器节点。传感器由时间驱动,控制器和执行器由事件驱动,任务到来时执行。采用一个4节点的有线网络模块模拟有线网络环境,其中1个节点为干扰节点,随机产生干扰信号扰乱网络传输,另外3个节点分别对应传感器、控制器、执行器节点。网络的类型选用CSMA/AMP(CAN)。
在TrueTime环境下建立系统的仿真平台如图5所示。其中传感器按时钟周期采样数据,然后将数据通过有线网络发送给控制器,控制器接收数据后立刻计算控制律,再通过有线网络发送给执行器,如此循环往复。
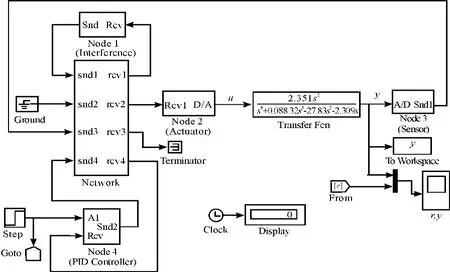
图5 WNCS仿真模型
控制器节点分别采用常规PID和模糊PID两种控制策略。常规PID不作赘述。模糊PID控制节点的参数初始化设置为:KP=150(比例增益);KI=87(积分增益);KD=17(微分增益);采样时间周期取0.01 s。然后根据误差e和误差变化率ec使用查模糊规则表解模糊来确定PID参数的修正量ΔKP,ΔKI和ΔKD,从而得到 PID控制器的最终PID调节参数:
在仿真程序中通过为变量exectime赋值来返回时延,例如exectime=0.001表示时延为1 ms。无时延时时延均设为0;有时延时均设为0.002 s。控制计算时间设置为0.001 s,则系统闭环预延为0.005 s。
设置好仿真参数后启动仿真,得到如图6所示的4种时延对有线网络控制系统影响的仿真曲线。
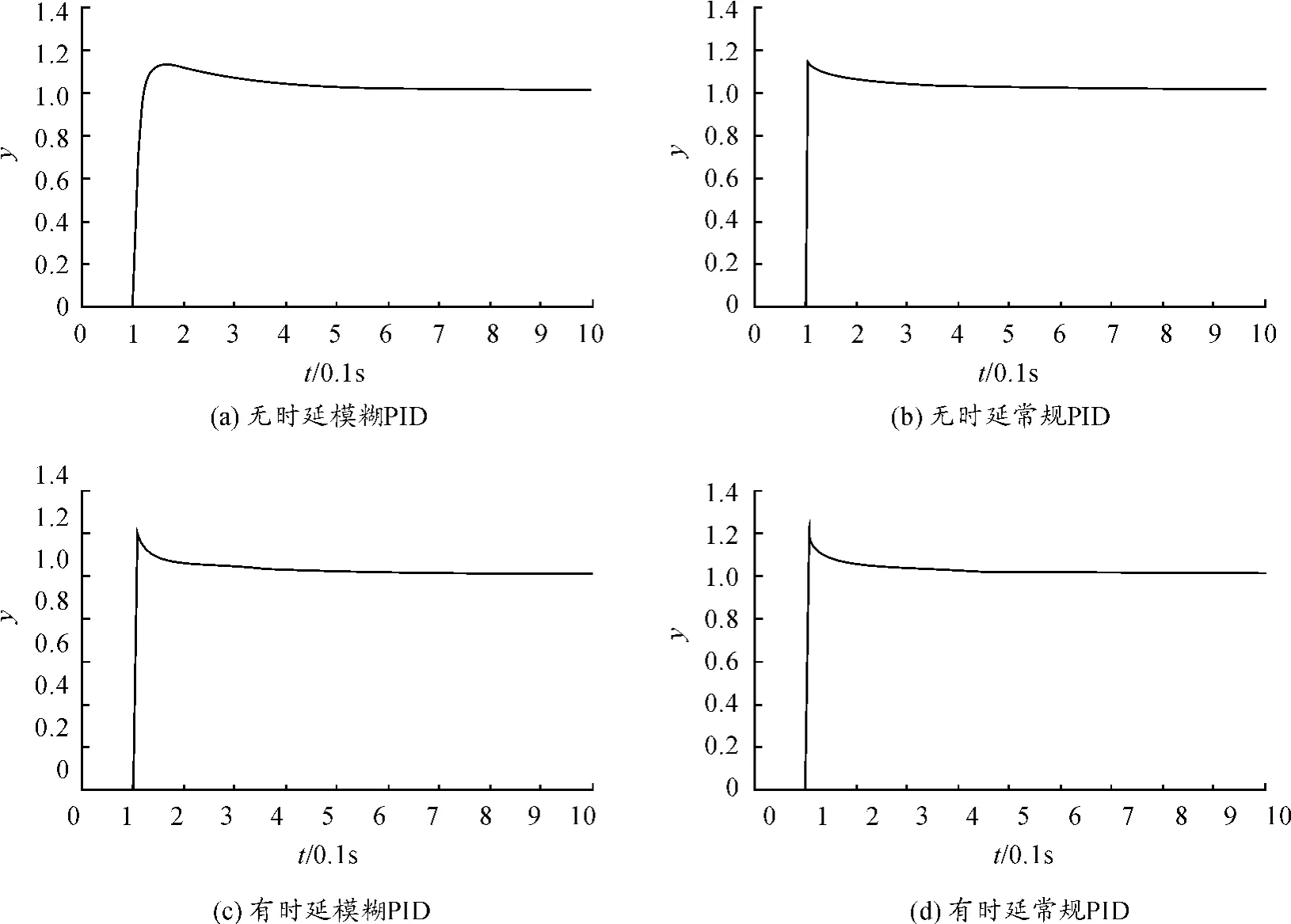
图6 时延对有线网络控制系统影响的仿真曲线
由图6可以看到:当系统没有传输时延时,常规PID和模糊PID的控制效果相差不多,超调量几乎相同,都小于1.2,但模糊PID的响应曲线更平滑;当系统存在网络时延时,相对于没有时延的情况,系统的品质明显变差,有时延模糊PID的超调量约为1.2,而有时延常规PID的超调量明显大于1.2,证明了模糊PID控制律的优越性。
4.2 WiNCS仿真
无线网络控制系统仿真平台的被控对象选用普通的电机模型,其传递函数为

系统参考输入信号为方波信号,网络类型选用IEEE 802.11b/g(WLAN)。系统的仿真平台如图7所示,其设置与有线网络类似,但与有线网络的区别是:无线网络控制同时也是一种功率控制,在传感器、控制器和执行器3个节点同时进行,周期性地发送ping消息给其他节点,检测信道传输。如果收到回复,就假设信道空闲且传输功率最小;反之,就认为传输功率一直增加到饱和或再次收到回复。
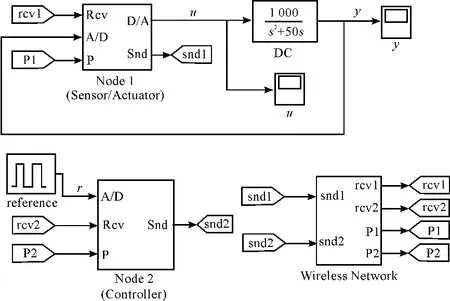
图7 WiNCS仿真模型
图8是时延对无线网络控制系统影响仿真曲线。同样采用常规PID和模糊PID两种控制策略,但由于是无线网络,仿真只考虑了有时延的情形。
由图8可知:无线网络控制系统中存在时延时,常规PID和模糊PID控制律下的对象y基本能跟踪参考输入方波的曲线变化,但模糊PID的误差控制在1.25左右,而常规PID的误差接近1.4。由此模糊PID的优越性在无线网络化控制系统仿真模型中得到验证。
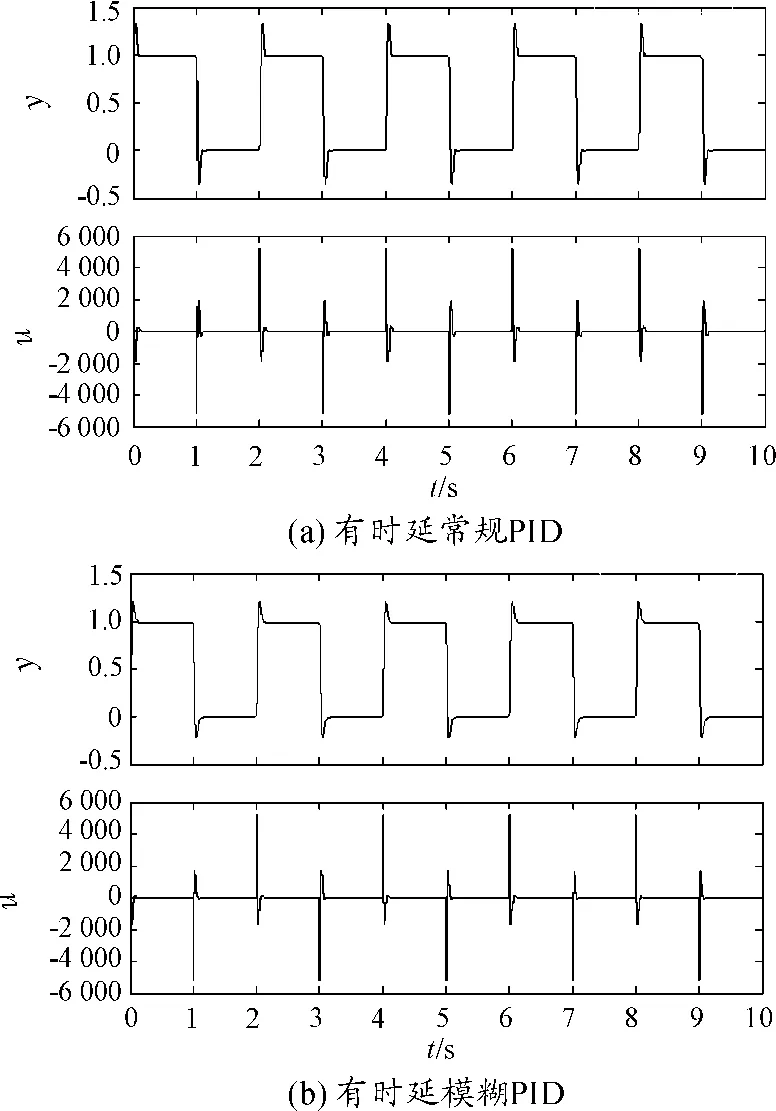
图8 时延对无线网络控制系统影响的仿真曲线
5 结束语
本文搭建的基于TrueTime的网络控制系统仿真平台中,有线网络控制系统的控制对象是倒立摆模型,无线网络控制系统的控制对象是普通电机,而时延的设置也包括系统本身存在的传输时延以及一个独立的干扰节点随机产生的时延,具有普遍性。本文采用模糊控制设计控制律,对比常规的PID,模糊PID控制效果更好,分别在有线和无线网络控制系统的仿真中得到了验证。基于TrueTime工具箱的模型能有效地模拟网络环境中的时延和随机干扰的影响,具有实时性,可维持系统的稳定。TrueTime还可实现系统控制和网络调度的综合研究。但是本文没有考虑丢包的影响,因此对网络控制系统的研究还有待进一步深入。
[1]王岩,孙增圻.网络控制系统分析与设计[M].北京:清华大学出版社,2009.
[2]Halevi Y,Ray A.Integrated communication and control systems:Part I analysis[J].Journal of Dynamic Systems,Measurement and Control,1998,110(4):367-372.
[3]王庆凤,陈虹,王萍.基于NS2的网络控制系统仿真平台的设计与实现[J].系统仿真学报,2011,23(2):270-274.
[4]康军,牛云.网络化控制系统综合仿真平台设计[J].系统仿真学报,2011,23(9):1842-1848.
[5]岳东,彭晨,Han Q L.网络控制系统的分析与综合[M].北京:科学出版社,2007.
[6]Zhang W.Stability analysis of networked control system[D].USA:Case Western Reserve University,2001.
[7]Feng D,Ren X.Simulation Research on Fuzzy PID in Network Control System[C]//Process Automation Instrumentation/Zidonghua Yibiao.2013.
[8]Zhang Y,Cheng P,Yin T F.A Stable Adaptive Control Method in Networked Control System[J].Applied Mechanics and Materials,2012,110:4837-4844.
[9]Peng D,Zhang H,Lin J,et al.Research of networked control system based on fuzzy immune PID controller[M].Germany:Springer Berlin Heidelberg,2011:141-148.
[10]何坚强,张焕春,经亚枝.基于Matlab环境的网络控制系统仿真平台[J].计算机工程与应用,2005(2):142-145.
[11]张湘,肖建.网络控制系统的分析与仿真[J].兰州交通大学学报,2010,29(3):104-107.
[12]鄂大志,薛定宇,魏玲,等.基于TrueTime的非线性网络控制系统[J].东北大学学报:自然科学版,2008,29(9):1232-1235.
[13]刘川来,郭蓝天,朱孔阳.基于TrueTime的网络控制系统的仿真研究[J].微计算机信息,2011,27(12):109-111.
[14]邓睿,汤贤铭,俞金寿.基于Truetime工具箱的网络控制系统时延分析[J].工业控制计算机,2010(2):24-26.
[15]赵贤林.基于状态空间的无线网络控制仿真研究[J].控制工程,2010,17(1):20-24.