共面多边形不变量计算方法研究
2015-12-05张政武
张政武
(陕西理工学院机械工程学院,陕西 汉中 723003)
共面多边形不变量计算方法研究
张政武
(陕西理工学院机械工程学院,陕西 汉中 723003)
不变量的场景理解和目标识别是计算机视觉研究的一个重要领域,以往有关不变量研究主要集中在点、直线、二次曲线等几何元素之间。在二维平面点的射影变换的基础上,利用平面三角形面积不变量构造了三角形、四边形、五边形、六边形等共面多边形的不变量,并提出了具体的计算方法。在此基础上通过举例分析和实验验证,证明文中所给公式的正确性。
计算机视觉;共面多边形;3D不变量;计算方法
20世纪80年代末,人们把在数学和物理学中成功应用的不变量理论引入机器视觉研究,初步形成了视觉不变量理论及其应用框架。从数学意义上讲,视觉不变量是目标几何结构在某些变换群条件下保持不变的函数形式,是反映不同模式之间本质差别的重要参数。近年来,基于不变量的场景理解和目标识别已成为计算机视觉研究的一个重要领域[1-3]。
有关不变量早期的研究,主要集中在利用点、直线等几何元素来实现对三维场景理解和空间物体识别[4-7]。文献[4]提出了一种从 3幅图像中计算空间6个点射影不变量方法;文献[5]通过对非线性方程组的求解提出了一种计算空间6点不变量的计算方法,并推导出了空间N点不变量的数目和图像平面中匹配点数目之间的相互关系;文献[6]提出了一种利用消失点列的射影不变量提取平面直线夹角方法,该方法可用于描述平面上直线间的平行、垂直、相交等相互关系;文献[7]提出了一种共线4点交比不变量的计算方法,并且利用该方法实现了对空间建筑物的三维重建。近年来,随着二次曲线造型技术的不断发展,基于目标不变量二次曲线三维场景的理解和识别也成为计算机视觉研究的一个重要方面[8-10]。文献[8]利用两幅图像中的7对匹配二次曲线,线性求解出刚体绕x, y, z轴的正负两组旋转运动参数;文献[9]利用单轴旋转运动中空间点的轨迹在图像平面的投影为二次曲线,建立了单轴旋转运动不变量,提出了单轴旋转运动的三维重建;文献[10]从二次型的不变量构造了两平面二次曲线的射影不变量,并利用平面二次曲线的共自极三角形对两平面二次曲线的不变量进行了几何解释。
在实际应用中,有时会将目标图像抽象为一系列共面多边形,这就需要提取出共面多边形的不变量。本文从二维平面点的射影变换出发,利用平面三角形面积不变量构造了三角形、四边形、五边形、六边形等共面多边形的不变量,并提出了具体地计算方法。在此基础上通过举例分析和实验验证,证明文中所给公式的正确性。
1 二维平面点的射影变换
设摄像机的成像模型为:在空间建立一个坐标系XYZ,让摄像机的光心与坐标系的原点O重合、光轴位于Z轴上,称平面Z=f是视平面;在视平面上建立一个像坐标系xoy,x、y轴分别与X、Y轴平行,称原点O为视点,常数f为焦距。摄像机在该模型下完成三维空间到图像二维空间的射影变换,其关系式可表示为:

或表示为:

其中,N为三维空间点(X, Y, Z)T的齐次坐标形式,m为二维平面图像点(x, y)T的齐次坐标形式,P为摄像机的投影矩阵。
当所研究的点均位于一个二维平面上或组成一个平面多边形时,空间点的坐标可以简化为平面上的二维坐标,则从一个二维空间到另一个二维空间的射影变换可以表示为:

式(3)可以展开为非齐次坐标形式:

2 共面多边形不变量构造
2.1 平面三角形面积及其不变量
假设三角形M在二维平面直角坐标系下,其3个顶点坐标分别为 (x1,y1)、 (x2,y2)、 (x3,y3)。根据有关几何理论可知,从三角形某个顶点出发,相邻两边的向量交叉坐标乘积之差的绝对值一半等于该三角形的面积。即:

同时,设 J( x,y)是射影变换式(4)在点( x,y)处的雅可比矩阵,则有:

假设三角形M经过射影变换式(3)后为M′,由式(5)、(6)可得三角形M′的面积为:

由式(7)可知,三角形在射影变换前、后的面积SM、SM′比值为雅可比矩阵乘积的次方,因此,三角形面积为该变换的相对不变量。
2.2 共面多变形不变量
由于平面n边形包含n(n=3,…,n)个顶点,每个顶点作为起点按顺时针(或逆时针)依次与其余相邻2点连接均可构成一个三角形单元体。因此,平面多变形的不变量可由三角形单元体的面积来构造。以三角形、四边形、五边形、六边形为例,将多边形顶点按顺时针依次标记为1、2、3、4、5、6,则多边形分割的三角形单元体见表1所示。

表1 各多边形分割成的三角形单元体
由于每个三角形的面积为射影变换的相对不变量,按照不变量理论,其乘积也是该射影变换的相对不变量。由表1可知,三角形、四边形各有1个相对不变量,五边形有2个相对不变量,六边形有4个相对不变量。各多边形对应的相对不变量见表2所示。

表2 各多边形的相对不变量
多边形的绝对不变量由相对不变量的商构造。由表2所示的各多边形的相对不变量可得其对应的绝对不变量见表3所示。
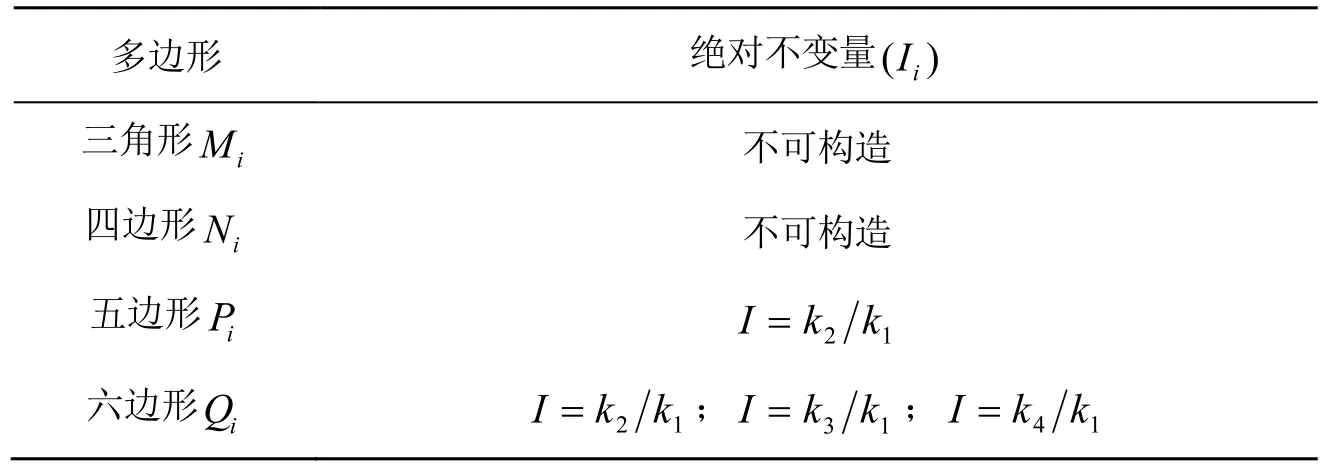
表3 各多边形的绝对不变量
3 算法举例与验证
设变换前三角形、四边形、五边形、六边形分别为M,N,P,Q,经过变换矩阵T二维射影变换后分别为M',N',P',Q',其中射影变换矩阵T为:则变换前、后各顶点对应坐标如表4所示。

各共面多边形变换前后三角形单元体的 S及S′见表5所示。

表4 各图形变换前后的坐标

表5 各共面多边形变换前后三角形单元体的S及S′
由表2可知,各共面多边形的相对不变量见表6所示。

表6 共面多边形的相对不变量
由表3可知,绝对不变量如表7所示。
由表6可知,变换前后五边形、六边形4个绝对不变量完全相同。
各多边形变换前后相对位置如图1所示,共面多边形变换前后相对位置如图2所示。

表7 共面多边形的绝对不变量

图1 各多边形变换前后相对位置
4 结 论
本文基于视觉不变性理论,从二维平面点的射影变换出发,利用平面三角形面积不变量构造了三角形、四边形、五边形、六边形等共面多边形的不变量,并提出了具体地计算方法。在此基础上通过举例分析和实验验证,证明文中所给公式的正确性。希望该方法能够为空间场景的三维重建和物体识别等方面的研究提供一个较好的理论基础。
[1] Bayro-Corrochano E, Banarer V. A geometric approach for the theory and applications of 3D projective invariants [J]. Journal of Mathematical Imaging and Vision, 2002, 16: 131-154.
[2] Unel M, Soldea O, Ozgur E, et al. 3D object recognition using invariants of 2D projection curves [J]. Pattern Anal Applic, 2010, 13: 451-468.
[3] Raviv D M, Bronstein A M, Bronstein M, et al. Equi-affine invariant geometry for shape analysis [J]. Journal of Mathematical Imaging and Vision, 2014, 50: 144-163.
[4] Long Quan. Invariants of six points and projective reconstruction from three uncalibrated images [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1995, 17(1): 34-46.
[5] 袁立行, 郑南宁, 王爱群. 一种新的空间透视不变量计算方法[J]. 西安交通大学学报, 1997, 31(1): 82-87.
[6] 刘 方, 王润生. 利用消失点列的射影不变量描述平面直线关系[J]. 电子学报, 2001, 29(9): 1188-1191.
[7] Rajashekhar S C, Namboodiri V P. Image retrieval based on projective invariance [C]//2004 International Conference on Image Processing (ICIP). Singapore, 2004, 10: 405-408.
[8] 程志远, 马彩文, 高满屯, 等. 基于序列图像中二次曲线对应的纯旋转运动参数估计算法[J]. 工程图学学报, 2006, 27(1): 98-104.
[9] Jiang Guang, Tsui H, Long Quan, et al. Geometry of single axis motions using conic fitting [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(10): 1343-1348.
[10] 张政武. 两平面二次曲线不变量的定义、几何解释及计算方法[J]. 机械科学与技术, 2012, 31(8): 1354-1358.
Computational Methods of Invariants of Coplanar Polygons
Zhang Zhengwu
(Department of Mechanical Engineering, Shaanxi University of Technology, Hanzhong Shaanxi 723003, China)
The comprehensive and recognition of 3D scene based on invariants are the most important research areas in computer vision fields. The conventional studies of invariants are that these invariants are derived for planar objects using points, lines, and conics from images. The invariants of triangular, quadrilateral, pentagonal and hexagon are structured by use of triangular area from 2D points perspective projection in this paper. And the computational methods of the invariants are derived. The result of example shows that this formula is correct on the basis of studies.
computer vision; coplanar polygon; 3D invariant; computational methods
TP 391
A
2095-302X(2015)05-0691-06
2015-02-07;定稿日期:2015-04-13
陕西省教育厅专项科研计划资助项目(15JK1163)
张政武(1969-),男,陕西蓝田人,副教授,硕士。主要研究方向为图学理论、计算机视觉。E-mail:zhzhw256@163.com
