旋转机械径向碰摩模型分析
2015-12-02何青,李展,李红
何 青,李 展,李 红
(华北电力大学 能源动力与机械工程学院,北京 102206)
导致旋转机械转静子碰摩发生的原因一般分为制造、安装、运行三个方面。如在制造中由于技术不精而造成的不对称或者偏心,在安装过程中转静子之间的间隙偏小,在运行中升降负荷过快、暖机时间过短都会使转静子发生碰摩。而碰摩一般分为径向、轴向和组合碰摩三类。从目前的文献中可以看出径向碰摩发生的概率最大。所谓径向碰摩就是指转子的外缘与静止部位发生接触而引起的碰摩。它一般发生在转子的动叶围带汽封上、轴端汽封、隔板汽封、油挡、轴承、挡汽片合密封瓦等部位。同时径向碰摩又可分成局部碰摩和全周碰摩。当转子在转动中始终与静子接触是全周碰摩,否则为局部碰摩。相对于径向碰摩来说由于轴向间隙一般比径向间隙大,所以轴向碰摩和组合碰摩的发生率较低。
对于转子与定子碰摩的研究主要包括理论实验研究和现场故障排除研究两类。其中理论实验研究一般又包括碰摩模型的建立和基于模型基础上的系统动力学行为分析两方面。文献[1,2]就研究了周期碰摩的涡动性和稳定性。文献[3]又研究了次谐周期碰摩运动的响应特性。文献[4]首先应用动量守恒定理对碰摩的机理进行了详细阐述,然后又利用恢复系数,忽略转静子系统的弹簧阻尼力和系统碰摩后的位移提出碰摩的数学模型。文献[5]也提出了适用于径向局部碰摩的模型。文献[6]等提出了单盘转子系统的非线性动力学模型。文献[7]建立了非线性弹性碰摩力模型。文献[8]提出了非对称转子系统的碰摩力模型等等。目前碰摩的模型种类很多,但实际效果并不太理想。因为,一方面旋转机械的种类繁多、结构差异较大,且在不同部位(密封、轴承、叶片等)、以不同方式(径向或轴向、单点或多点等)、不同力学特性的静、动件(材料特性异同、支承特性差异等)的碰摩的模型不尽相同。另一方面系统碰摩模型中参数很多,所以受环境、温度等的影响较大,以致造成模型的精度较低。模型的精度又将直接影响动力学行为的分析,造成碰摩故障无法识别和排除,给实际生产造成重大损失。
本文基于转子与定子径向碰摩发生时的系统结构特征、发生部位和所含参数等不同,主要总结和分析了各类碰摩模型的优缺点和使用范围,并对将来模型的发展和研究提出了合理的建议。
1 径向碰摩模型分类
由于大型转子系统本身是精密且复杂的非线性系统,再加上转定子的碰摩一般为其他故障的间接结果,所以碰摩这种故障的分析方法必定也是多样的。对不同的机构形式,从不同角度出发,可以建立不同的数学和物理模型。这些模型的使用对象和精度不尽相同。通过对目前使用的模型进行总结可以得出如图1所示各类模型。
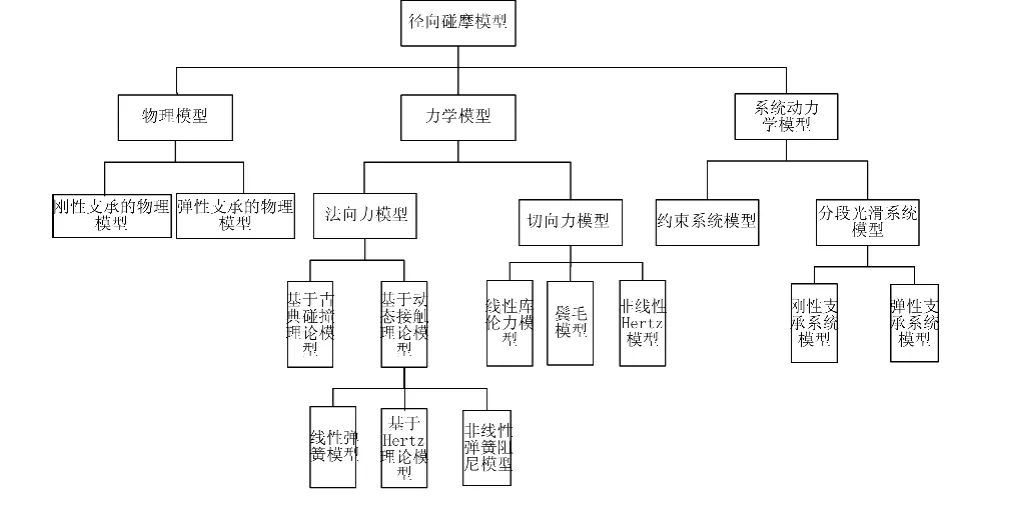
图1 径向碰摩模型的分类
2 物理模型
物理模型是建立在分析现象与机理认识基础上的模型。描述的是对象系统“如何做”、“如何实现”的系统的物理过程。一个理想的物理模型的建立需要舍弃研究对象中的次要因素,抓住导致此问题的主要因素,以便用最简单的方法解决问题。而转静子的系统结构形式不同势必会造成它的物理模型的差异。一般根据转子的支承是否是刚性的而把系统分为刚性支承的物理模型[9,10]和弹性支承的物理模型[11]。
(1)基于刚性支承的物理模型
刚性支承的物理模型如图2和图3所示,也是研究碰摩问题的最原始的模型。此模型大大简化了实际的转子系统,所以分析起来比较简单。
从图3中可知当转子运动时的几何中心偏移量O1O2的值大于转静子之间的间隙时碰摩就会产生。刚性支承结构简单,分析方便,但是若一味的加固支承将会得到相反的效果。且现代研究表明应用弹性支承的物理模型更能反映现实的系统结构。因此,刚性支承相对于弹性支承来说,适合精度要求不高的初步分析。
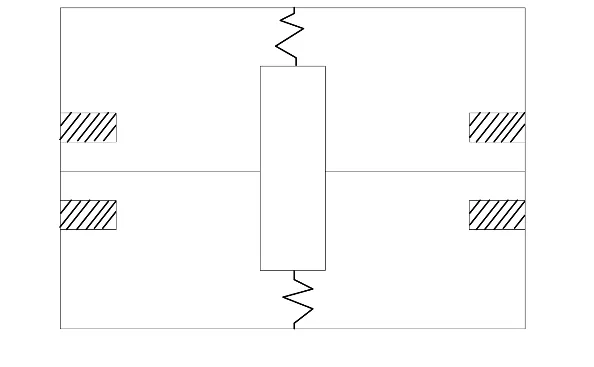
图2 刚性支承的结构图
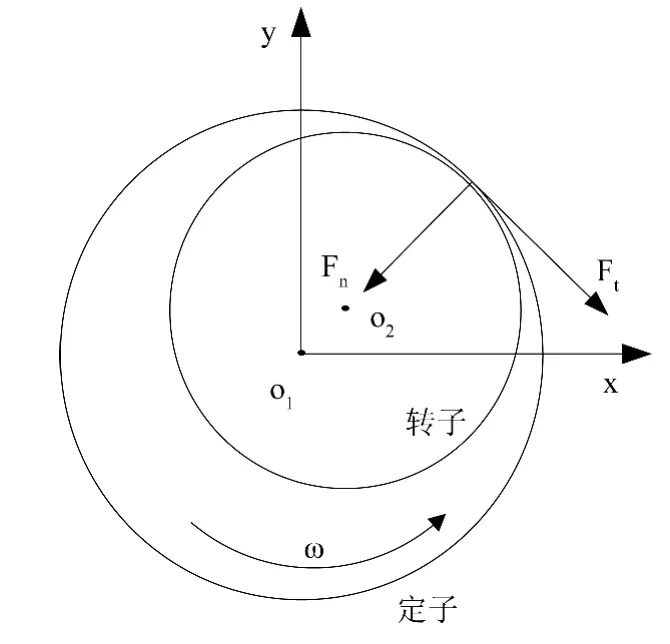
图3 刚性支承的碰摩力图
(2)基于弹性支承的物理模型
弹性支承的物理模型如图4和图5,定子的支承为弹性的,此时定子可以随轴一起振动,它可以减少振幅,降低支承力,因此采用弹性支承是使超临界机组运行安全可靠的有效设计途径。从图5中可以看出OO1和OO2分别为定子和转子在运动时所产生的偏移量,当两个偏移量之差大于转静子之间的间隙时碰摩现象就会出现。
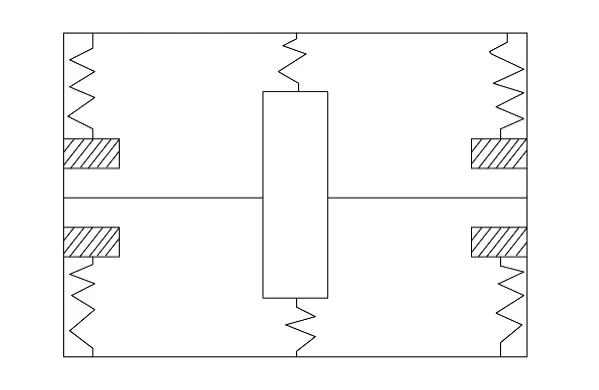
图4 弹性支承的结构图

图5 弹性支承的碰摩力图
随着振动力学的发展,文献[8]等进一步考虑了转子和定子之间的阻尼力作用即让弹性支承的物理模型包含了转静子在运动中的能量耗散作用,且从实验结果来看这时的模型更符合实际。它的物理结构模型图如图6所示。

图6 弹性支承的阻尼结构图
3 力学模型
简单而准确有效的力学模型是对碰摩进行理论分析的基础。径向碰摩的力学模型一般包括法向力模型和切向力模型[12-14]。
3.1 法向力模型
根据求碰摩法向力时所应用的原理不同,法向力模型分为古典碰撞理论模型和动态接触理论模型两类。
3.1.1 古典碰撞理论模型
古典碰撞理论模型,就是运用动量守恒定理求出转静子之间的相互作用力。然后利用广义冲量-动量方程和恢复系数方程来获得碰撞后系统的运动状态。但对多体系统碰撞问题釆用冲量-动量法时需要一些假设条件,且在非对心斜碰撞问题中,由于切向摩擦力的作用,仅采用恢复系数来表达系统前后速度的变化是不精确的。所以古典碰撞理论模型的使用有局限性。
3.1.2 动态接触理论模型
动态接触理论把碰撞过程微观化,充分考虑碰撞过程中两碰撞体之间的接触时间、接触变形和接触力[12]。在此基础上建立法向力模型时,不但要考虑是否完全表现了所要研究碰摩过程的主要特征,还要考虑能否有效分析转静子碰摩系统。动态接触理论模型可以分为线性弹簧模型、基于Hertz理论模型、非线性弹簧阻尼模型。
(1)线性弹簧模型
当转轴或圆盘与静子发生碰摩时,如果我们采用分段线性弹簧来模拟法向上的相互作用力则径向法向力[15]为

式中e——转子的径向偏移量,mm;δ——碰撞面的接触变形量,mm;k——碰摩面的刚度系数,N/m。
此模型是上述假设分段线性弹簧模型的近似描述方程,此方程虽然简单但准确性较差。且没有考虑模型中线性弹簧的阻尼和刚度系数的选用等问题。文献[16]提出了一种简单常用的线性阻尼模型为

式中c——线性弹簧阻尼,N·s/m。
且在线形弹簧阻尼模型中要把碰撞过程看成一个单自由度振动模型。
(2)基于Hertz理论模型
转子与定子碰摩系统是一类多参数、高维非光滑且强非线性系统,其动力学行为非常复杂。如果只在系统为线性的假设上建立模型,则难免产生误差。假设碰摩系统满足Hertz接触理论条件,那么在此基础上可以建立Hertz非线性碰摩力模型[17]。
文献[18]提出当在转静子间相对速度小于0.5m/s的情况下,径向法向力可以表示为
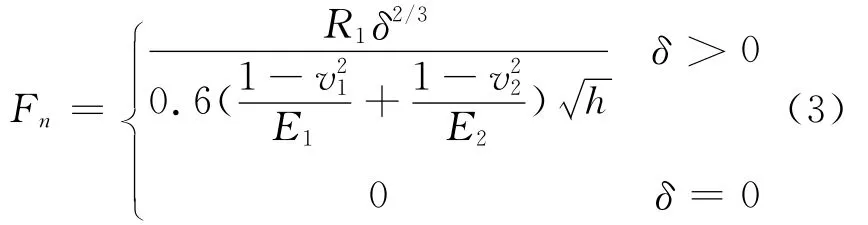
式中δ——转静子的径向嵌入深度,mm;E1,E2——转静子的杨氏模量,Pa;R1——转子的半径,mm;v1,v2——转静子的泊松比;h——转静子之间的间隙,mm。
文献[17]经过实验验证得出如图7所示的Hertz非线性模型和线性刚度模型中径向力Fn随转—定子嵌入深度之间的关系图,在O-A段,Hertz非线性模型的法向力小于线性刚度法向力,在A点附近,此两种模型的差别不太大,但随着碰摩程度的加深,两种模型的区别也增大。由于Hertz模型是以弹性接触理论为基础,通过引入Hertz接触原理得出,因此在对严重碰摩的研究中使用Hertz碰摩力模型能减小误差。
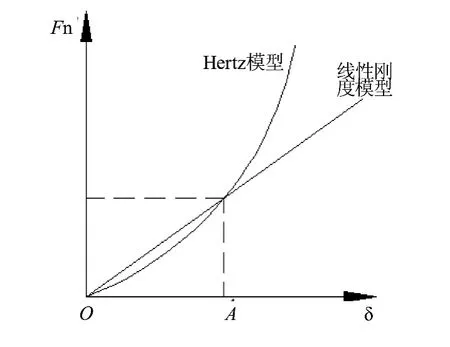
图7 Hertz模型与线性模型的关系
(3)非线性弹簧阻尼模型
线性刚度模型和Hertz模型属于建立在准静态接触理论基础上的模型,它需要建立在特殊的物理几何条件下且无法计算系统能量损失,所以适用范围较窄,不具备通用性。鉴于此有学者提出了一种改进的Hertz理论模型即非线性弹簧阻尼模型,以求适应更宽的范围。
文献[19]首先提出了同时考虑法向力和法向阻尼的法向力模型为

文献[20]在式(4)的基础上提出具有非线性法向力的模型为
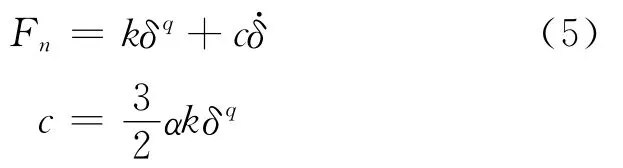
根据Hertz理论,q一般取3/2。
非线性弹簧阻尼模型采用一个非线性弹簧-阻尼来模拟系统,弹簧用来表示接触过程中的弹性变形,阻尼用来模拟能量耗散。由于非线性弹簧-阻尼模型即考虑转、定子接触过程中的塑性变形又提供了一种合理的确定法向接触过程中能量消耗的方法,因此被很多学者广泛应用。
除此之外还有分段塑变模型和叶片与机箱碰撞力模型。分段塑变模型的特点是碰撞膨胀阶段会产生不恢复的塑性变形,一般用于研究两碰撞体之间有脆性材料垫存在时所用。这类模型的特点是碰撞膨胀阶段与压缩阶段刚度存在一定的滞回,但不会产生塑性变形。叶片与机箱碰撞力模型主要用于飞机的双转子发动机的碰摩系统中。由于发动机中叶片尖端处有很高的线速度,碰撞能量较大,对转子动力学行为的影响也大。所以需要建立一种专门的模型。以上两种模型表达式都较为复杂,且应用范围较窄。
3.2 切向力模型
切向力模型就是碰摩产生的摩擦力的计算方法,摩擦可能阻碍转子系统的运动,产生能耗。碰摩的切向力模型目前一般分为线性库仑力、鬃毛模型、非线性Hertz模型、黏性模型等。
(1)线性库仑力模型
线性库仑摩擦力模型是计算切向摩擦力时最常用到的模型。因为它的形式简单,且可以取得不错的近似效果。在具体计算时如果转静子系统处于滑移状态则为

如果处于黏合状态则为

式中μm,μn——静摩擦系数和动摩擦系数;Fn——法向力,N;vr——相对转静子的相对速度,m/s。
式(7)中动摩擦系数一般可以根据不同的因素来进行估计。如果假设转静子的碰摩产生的热全部转化为热能的话,文献[21]提出了一种计算μn方法。文献[22]也通过反复试验得出一个较为统一的μn随滑动速度变化的关系式。
(2)鬃毛模型
文献[23,24]提出了一种计算切向力的鬃毛模型如图8所示。此模型是用一组鬃毛来模拟转静子接触表面上众多的随机分布的凸触点。定义其摩擦力为

式中k——鬓毛刚度,N/m;S——鬓毛位移量,mm。
鬓毛模型是一种基于连续接触触动力学和大量的随机行为模型,能很好地计算出摩擦力随时间的变化,最重要的是切向摩擦力在接触点黏合阶段具有明确的物理意义和确定性。
文献[25,26]在鬃毛模型的基础上提出了LuGre模型如图9所示。此模型采纳了鬃毛模型建模的思想,但其与鬃毛模型不同,LuGre模型是基于鬃毛的平均变形来建模,而不是大量的随机行为。LuGre模型的计算式为

式中k——刚性系数,N/m;z——鬓毛的均匀变形量,mm;c——阻尼系数,N(m/s);μ——粘性摩擦力系数;v——两表面之间的相对速度,m/s。
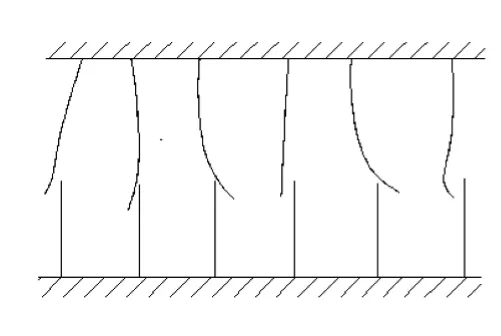
图8 鬃毛模型
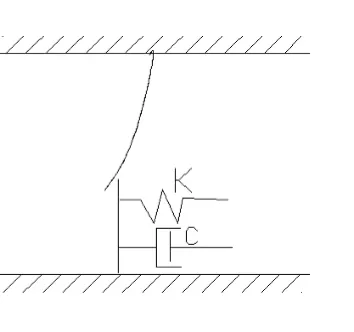
图9 LuGre模型
LuGre模型能很好地描述转静子在尚未滑动时和静摩擦与滑动摩擦转换时的摩擦特点,因为它是利用鬃毛的平均变形来反映碰摩力的特征的,这一点比单纯的鬓毛模型更有优势。除此它能完善的描述各种碰摩特性,如预滑动位移,可变的最大静摩擦力、摩擦滞后现象等等。
(3)非线性Hertz模型
由于碰摩现象是一种强非线性故障,而库伦模型等毕竟是一种对碰摩的简化描述。则这样的模型一定会给计算结果带来一些影响。
如果不考虑转静子系统碰摩的热效应,再假设转子与碰摩体间的局部碰撞变形为弹性变形,建立非线性 Hertz模型[27]为

式中μ——转静子的摩擦系数;Fn——法向力,N;vr——碰 摩 体 间 的 相 对 滑 动 速 度,m/s;B1,B2——相对速度影响系数,其值按系统的相关条件进行假设。
非线性Hertz模型充分考虑了碰摩的强非线性,高维性及其它相关因素。所以说此模型可以刚好的和碰摩现象向匹配,精确性更高。
除此之外,还有两类比较特殊的切向力模型。那就是叶片与机匣的模型[12]和涡轮机摩耗模型[13],前一种模型在法向力模型中也做了简要的介绍。由于叶片的高速运转,当它和定子碰撞时会产生高温,以使叶片发生溶化进而熔化金属(黏性流体)就会产生相应的剪切力。后一种模型是由于为了减少更换叶片的成本,而将可摩耗的材料作为机壳的内壁材料以使叶片保持完好。但这样就会产生能量耗散,并由此推出切向力模型。但这两种模型使用对象较为专一。
3.3 系统动力学模型
由于研究的侧重点以及基于上面各模型的不同,系统碰摩的动力学模型一般分为约束系统模型和分段光滑系统模型[12,13]。
3.3.1 约束系统模型
假设碰摩过程是瞬间完成的,且定子固定而又忽略转静子的弹性变形量,仅通过恢复系数去描述碰撞后的速度和能耗变化,此系统为约束微分系统,其相空间中的流在碰摩处是不连续的,其对应的模型就是约束系统模型[28]。由于此模型不能直接反映转静子本身在碰摩面的物理参数变化,更适用于定性地研究碰摩系统可能出现的动力学现象,一次约束系统模型有局限性[29]。
3.3.2 分段光滑系统模型
如果认为碰摩的发生持续一定的时间,且碰摩力连续但非光滑。考虑转静子碰摩时的能耗和变形,即当转子与定子接触时,刚度增大,反之减小。则此时其在相空间中的流是连续但分段光滑的,与之相对应的模型称为分段光滑系统模型。为了对碰摩系统动力学模型进行更详细的说明,再按支承是刚性和弹性两种类型对分段光滑系统模型进行分类[13,14]。
(1)刚性支承系统模型
刚性碰摩的支承系统模型认为定子是非惯性的,根据碰摩面是否具有嵌入型形变而把刚性支承模型分为变形和非变形碰摩模型两类,文献表明 后 者 的 应 用 较 为 普 遍[30-32]。且 Wiercigroch[33,34]和文献[12]都对此模型进行了相关的研究与总结工作,此模型为
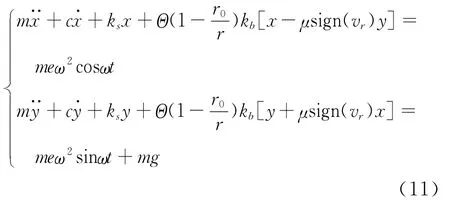
式中m——转子质量,kg;x,y——转子水平和竖直方向
的位移,m;ks,kb——转轴刚度和碰摩面(定子)的刚度,N/m;r0——转子与定子之间的间隙,mm;r——转子几何中心的位移,mm;rd——碰撞处转子的半径,m;e——转子的偏心量,mm;ω——转子的转速,r/min;ωw——转子的涡动速度r/s;vr——碰摩处的相对线速度,m/s。当发生碰摩时Θ取1。
此模型比起弹性模型的形式更为简单,所以使用范围更广。此外还可以根据所研究的对象包含的具体的因素如是否考虑重力、裂纹、陀螺效应、干摩擦失稳等进行适当的改变。
(2)弹性支承系统模型
弹性支承模型的实质是考虑定子具有惯性,更进一步可以根据碰摩面是否有嵌入型形变把弹性支承模型分为变形碰摩和非变形碰摩模型。由于惯性的存在系统的自由度数增加,在运算时非常复杂,所以在实际计算时很少选择此模型。
4 讨论
在径向碰摩的物理模型中,弹性支承的物理模型考虑的因素即包含的参数较多,则它更符合实际的转子系统。但刚性支承的物理模型所含参数较少,但计算较为简单,所以更符合初步的计算和分析。在法向力模型中基于动态接触的理论模型充分考虑了碰撞过程中两碰撞体之间的接触时间、接触变形和接触力等因素,所以它较古典碰撞理论模型更符合实际的系统,应用也较广泛。而在动态接触的理论模型中非线性阻尼弹簧模型的应用范围和精度也较其他两种模型更好。在切向力模型中线性库仑力模型最简单,可以用在精度不高的计算中,而鬓毛模型和非线性Hertz模型所含参数较多,相应的精度更高,可以用在精确的分析中。在系统动力学模型中分段光滑系统模型较约束系统模型来说更符合系统的实际运行状况。而分段光滑系统模型中的基于弹性支承的系统模型虽然在精度上比刚性支承的系统更接近实际情况,但由于其自由度数太大,计算繁琐,所以刚性支承的系统模型的使用率更高。
(1)对于法向力碰摩模型,主要从经典碰撞动力学理论出发,充分考虑动静件的局部塑性变形、局部热效应和摩损等因素,其中包含有准确给出各种法向碰摩力的正确形式以及选择合理的符合现实的影响参数。把握主要影响参数去除次要的,从而构建适合特定碰摩条件下的碰摩模型。
(2)对于切向力碰摩模型,主要以经典库仑摩擦理论为出发点,通过进一步的细化分析摩擦时动静件的状态变化,改进库仑摩擦模型,研究在不同条件下的摩擦系数的精确选取,以求能准确反应摩擦过程中动静件的不同运动状态下(未接触、黏合和滑移)的位移,速度以及受力的大小[35]。
(3)对于系统动力学模型,努力建立能充分反应转子和定子系统的各种的动力学特征的碰摩系统模型。这其中包含有合理的转子和定子参与响应时的模态变化,能够精确反映系统发生局部单点或多点碰摩等。
(4)要充分考虑在碰摩过程系统周的接触介质的作用力变化(如油膜力、激振力、气尖力等),除此还应该考虑碰摩时产生的热效应和瞬时冲击力大小等等。
[1] H F Black.Interaction of a whirling rotor with a vibrating stator across a clearance annulus[J].International Journal of Mechanical Engineering Science,1968,3(10):1-12.
[2] E F Enrich.The dynamics stability of rotor/stator radial rubs in rotating machinery [J].Journal of Engineering Industry,1969,4(4):1025-1028.
[3] D E Bently.Forced subrotative speed dynamic action of rotating machinery[J].Wastepaper 1974,74-PET-16.
[4] A.Muszynska.Rotor-to-stationary element rub-related vibration phenomena in rotating machinery literature survey[J].Shock and Vibration Digest,1989,6(21):3-11.
[5] D W Childs.Fractional-frequency rotor motion due to nonsymmetrical clearance effects[C].ASME 81-GT-145.
[6] F L Chu,Z S Zhang.Bifurcation and chaos in a rub impact Jeffcott rotor system [J].Journal of Sound and Vibration,1998,210(1):1-18.
[7] 何韶君.非线性弹性碰摩转子周期运动稳定性分析[J].机械科学与技术,2007,10(15):13-17.HE Shao-jun,ZHANG Song-he.Stability analysis of periodic motion of nonlinear elastics rotor system with rubimpact fault[J].Mechanical Science and Technology,2007,26(10):1317-1320.
[8] 吴敬东.转子系统碰摩的若干非线性动力学问题研究[D].沈阳:东北大学,2006.
[9] W D Marscher.Test simulation of turbo machinery rotor/stator interactions[J].Lubricate on engineering journal of the American society of lubrication Engineers,1983,39(9):577.
[10] 施维新.汽轮机发电机组振动及事故[M].北京:中国电力出版社,2008.
[11] 陶海亮,潘波.滚动轴承-转子系统非线性动力响应分析[J].燃气轮机技术,2013,26(1):15-20.TAO Hai-liang,PAN Bo,GAO Qing,et al.Nonlinear dynamic response analysisof a rotor-ball bearing system[J].Gas Turbine Technology,2013,26(1):15-20.
[12] 江俊,陈艳华.转子与定子碰摩的非线性动力学研究[J].力学进展,2013,43(1):132-148.JIANG Jun,CHEN Yan-hua.Advances in the research on nonlinear phenomona in rotor/stator rubbing systems[J].Advances in Mechanics,2013,43(1):132-148.
[13] 董富祥,洪嘉振.多体系统动力学碰撞问题研究综述[J].力学进展,2009,39(3):352-358.DONG Fu-xiang,HONG Jia-zhen.Review of impact problem for dynamics of multibody system[J].Advances in Mechanics,2009,39(3):352-359.
[14] 马辉,太兴宇,李焕军,等.旋转叶片-机匣碰摩模型及试验研究综述[J].航空动力学报,2013,28(9):2055-2069.MA Hui,TAI Xing-yu,LI Huan-jun,et al.Literature survey of rub-impact model and experiment of rotating blade and casing[J].Journal of Aerospace Power,2013,28(9):2055-2069.
[15] 李永强,刘杰.非线性刚度不平衡转子径向碰摩动力学研究[J].应用力学学报,2005,22(3):475-478.LI Yong-qiang,LIU Jie.Dynamics behavior of nonlinear rigid unbalanced rotor system supported on oil film bearing[J].Chinese Journal of Applied Mechanics,2005,22(3):475-478.
[16] B K Mishra.A review of computer simulation of tumbling mills by the discrete element method:Part I-contact mechanics[J].International Journal of Mineral Processing,2003,71,73-93.
[17] 王涛,傅行军.基于Hertz接触模型的碰摩转子动力学响应研究[J].汽轮机技术,2009,51(1):25-27.WANG Tao,FU Xing-jun.Dynamic response of rub-impact rotor based on hertz contact model[J].Turbine Technology,2009,51(1).
[18] S Timoshenko,J N Goodier.Theory of Elasticity[M].McGraw Book Company,Inc,1951:377-379.
[19] K H Hunt,F R Crossley.Coefficient of restitution interpreted as damping in vibrant impact[J].Journal of Applied Mechanics,1975,42(4):440-445.
[20] M Fumagalli,G Schweitzer.Measurements on a rotor contacting its housing[C].IMachE Conference Transactions 6th International Conference on Vibration in Rotating Machinery.1996,779-788.
[21] Ettles.The thermal control of fiction at high sliding speeds[J].Journal of Tribology,1986,108(1):98-104.
[22] 温诗铸,黄平.第3版.摩擦学原理[M].北京:清华大学出版社,2008.
[23] D A Haessig,Friesland.On the modeling and simulation of friction[J].Journal of Dynamic systems,Measurement and control,1991,113:354-362.
[24] Mao.Contact dynamics modeling for the simulation of the space station manipulators handing payloads[C].IEEE International Conference on Robotics and Automation,1995:1252-1258.
[25] W C Canudas,H Olsson,P Lischinsky.A new model for control of systems with friction[J],IEEE Transactions on Automatic Control,1995,40(3):419-425.
[26] 刘占生,张敏,张广辉,等.基于LuGre摩擦模型的叶片碰撞摩擦特性研究[J].振动与冲击,2012,31(12):172-178.LIU Zhan-sheng,ZHANG Min,ZHANG Guang-hui,et al.Characteristics of impact-contact and friction between tips of blades based on LuGre model[J].Journal of Vibration and Shock,2012,31(12):172-178.
[27] 王正浩,袁惠群,闻邦椿.相对速度对转子碰摩运动特性的影响[J].机械强度,2009,31(2):175-181.WANG Zheng-hao,YUAN Hui-qun,WEN Bang-chun.Influence of relative velocity on motion properties of the rub-impact rotor system [J].Journal of Mechanical Strength,2009,31(2):175-181.
[28] 王涛.基于Hertz接触模型的碰摩转子动力学响应研究[J].汽轮机技术,2009,51(1):13-16.WANG Tao,FU Xing-jun.Dynamic response of rub-impact rotor based on hertz contact model[J].Turbine Technology,2009,51(1):13-16.
[29] 杨树华.碰摩转子系统的动力学行为研究[J].风机技术,2003,2(5):12-16.YANG Shu-hua.Research on dynamics behaviour of impactive &frictive rotor system[J].Compressor,Blower& Fan Technology,2003,2(5):12-16.
[30] 张思进,陆启韶.碰摩转子系统的非光滑分析[J].力学学报,2000,32(1):59-69.ZHANG Si-jin,LU Qi-shao.A non-smooth analysis to the rubimpacting rotor system[J].chinese journal of theoretical and applied mechanics,2000,32(1):59-69.
[31] E V Karpenko,M Wiercigroch,M P Cartmell.Piecewise approximate analytical solutions for a Jeffcott rotor with a snobbery ring[J].International Journal of Mechanical Science,2002,44(5):475-488.
[32] E V Karpenko,M Wiercigroch,M P Cartmell.Regular and chaotic dynamics of a discontinuously nonlinear rotor system[J].Chaos,Solitons &Fractals,2002,13:1231-1242.
[33] E V Karpenko,M Wiercigroch,E E Pavlovskaia.Bifurcation analysis of a preloaded Jeffcott rotor.Chaos[J].Solitons &Fractals,2003,15:407-416.
[34] M Wiercigroch,E V Karpenko,M P Cartmell.Piecewise approximate analytical solutions for a Jeffcott rotor with a snubber ring[J].International Journal of Mechanical Science,2002,44:475-488.
[35] 秦志英,赵月静,侯书军.物料冲击破碎过程中的一种非线性力模型[J].振动与冲击,2006,25(2):35-37.QIN Zhi-ying,ZHAO Yue-jing,HOU Shu-jun.Nonlinear force model during material′s impact crushing[J].Journal of Vibration and Shock,2006,25(2):35-37.