同旋向供弹单元设计与仿真优化
2015-11-27郭竞尧谢杨杨张永涛
郭竞尧,谢杨杨,张永涛
(西北机电工程研究所,陕西 咸阳 712099)
目前,小口径防空反导火炮向着高射速、高密集度、低后坐力及高毁伤概率等方向发展[1],供弹机构是自动炮的重要组成部分,同时又是最复杂的部分之一,其结构及形式在很大程度上决定了自动炮结构的复杂程度,因而它们对自动炮的射速有着至关重要的影响[2-3]。弹链式供弹的结构原理己渐渐无法适应高射速火炮的要求,为了进一步提高小口径火炮的发射速度和工作的可靠性,专用的无链供弹系统应运而生,而无链供弹交接本质上就是对高速运动的炮弹与弹链传动后经拨弹轮实现炮弹在不同传输单元间的交接问题[4-5]。
目前无链供弹系统细分到炮弹的各个交接单元可分为:反旋向供弹交接和同旋向供弹交接两种形式。笔者分析了拨弹轮之间的反旋向交接和同旋向交接的特点,以同旋向交接为重点进行了分析,以某自动机的供弹系统为例建立了多刚体模型,并对其进行了动力学仿真分析,得到了适应工程化设计的优化值,分析过程及结果对无链供弹系统的优化设计提供了一定的参考。
1 动力学分析模型的建立
1.1 同旋向供弹单元简述
供弹系统中拨弹轮之间通常都是通过反旋向形式交接炮弹,即两个实施炮弹交接的拨弹轮旋向相反,通过一对齿轮进行动力传动。反旋向供弹单元中炮弹的交接过程速度变化小,继而炮弹受冲击力小、交接动作可靠,在供弹系统设计中应用广泛,其工作形式如图1所示。
但由于反旋向供弹单元中炮弹运行轨迹长,在一些特殊要求下,如供弹空间布局有特定要求时,甚至需要增加一级反旋向供弹单元传递炮弹才能达到供弹系统的功能要求,这无疑增加了供弹系统的设计难度,同时还降低了系统可靠性。
而同旋向供弹单元的供弹路线短,且拨弹轮之间的距离比反旋向供弹要小,比较适合结构紧凑的供弹机构,如图2所示,但由于炮弹在拨弹轮之间传递时的速度方向及速度均有变化,会对炮弹带来一定的冲击。为了发挥同旋向供弹形式的优势,同时将炮弹在交接过程中的速度变化降低到合理范围内,需要对同旋向供弹形式进行深入分析。
1.2 多刚体模型的建立
对于刚体位形的描述,ADAMS采用质心在惯性参考系中的笛卡尔广义坐标来表示[6-7]:

式中:平动坐标(x,y,z)表示质心位置;欧拉角(ψ,θ,φ)用于确定其方位。
ADAMS利用带拉格朗日乘子的拉格朗日第一类方程的能量形式建立如下方程:
集成约束方程ADAMS可自动建立系统的动力学方程:
式中:T为系统广义坐标表达的动能;q为广义坐标;Q为在广义坐标q方向的广义力;Φ为系统约束方程;λ为拉格朗日乘子;P为系统的广义动量;H为外力的坐标转换矩阵。
以某自动机为例,为其设计的供弹系统中的同旋向供弹单元的模型见图3。
将该模型简化后转化为Parasolid格式并导入机械动力学仿真软件ADAMS中[8],建立同旋向供弹单元的参数化仿真模型(两拨弹轮水平放置,仿真分析中炮弹起始位置位于输送级拨弹轮中心的竖直正上方),如图4所示。模型中,炮弹与拨弹轮和导轨均为接触碰撞,相应接触中的动摩擦因数设为0.2,两拨弹轮均设定转动副并取相同的转速和旋向,拨弹轮、导轨及炮弹均调用材料物性数据库中钢材的材料特性(弹性模量为207kN/mm2,泊松比为0.29,密度为7.801×10-6kg/mm3)。
2 动力学仿真及结果分析
同旋向供弹单元共有3个设计输入条件:两拨弹轮间中心距;两拨弹轮之间相位角(以下简称相位角);炮弹运行轨迹的过渡圆半径(以下简称过渡圆半径)。由于两拨弹轮中心距多由总体布局决定,在此着重分析拨弹轮中心距一定的情况下,相位角及过渡圆半径的影响。优化目标:使炮弹在拨弹轮之间交接时的速度波动值较小;并且能使加工装配中产生误差的影响度较低。
仿真优化过程依照设计参数抽样分析的方法[9-10],根据工程设计的特点,在供弹单元能够工作的前提下赋予相位角及过渡圆半径一定的取值范围,并在取值范围内选取特定的采样点进行动力学仿真,具体取值见表1。
表1 同旋向供弹单元参数输入抽样
在3 000 发/min 的供弹速度下,经动力学仿真,得到各相位角下炮弹在拨弹轮交接过程中的速度变化曲线,见图5~图10。图5中,A 点为炮弹由输送级拨弹轮推动进入过渡段的起始点;B 点为两拨弹轮交接炮弹过程的起始点;C 点为两拨弹轮交接炮弹过程的结束点。图6~图10的特征点与图5相同。
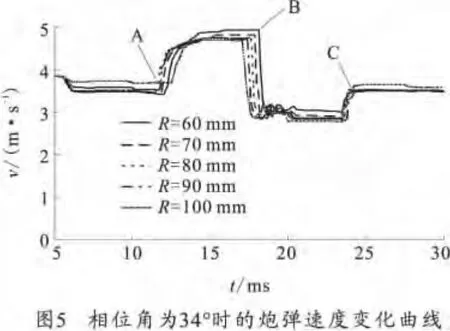
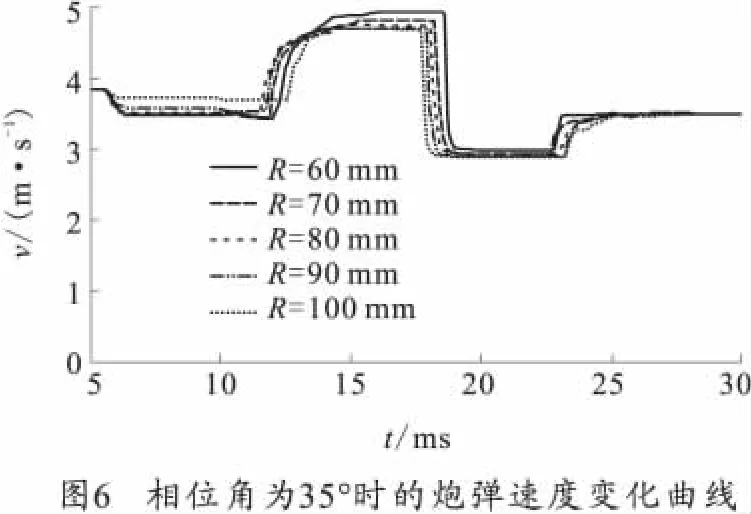
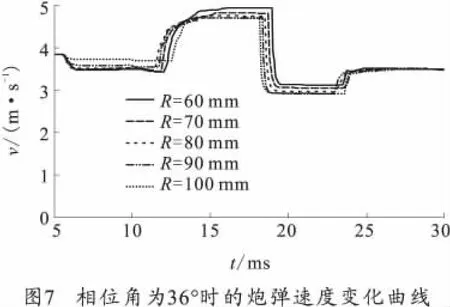
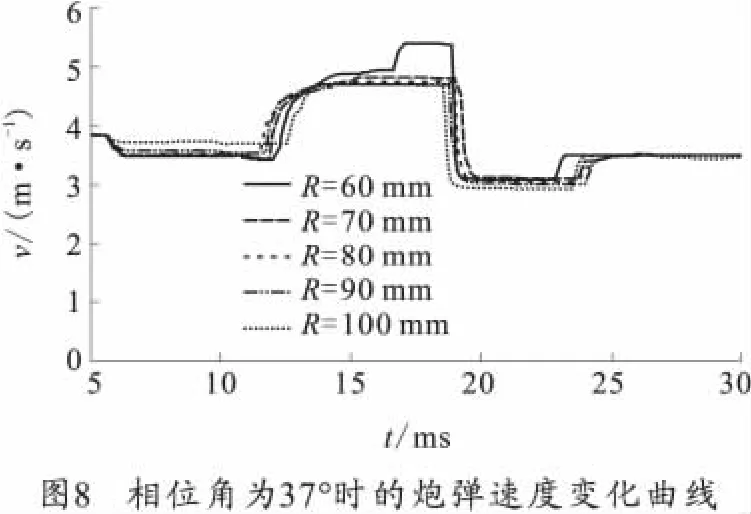
在拨弹轮交接炮弹的过程中,炮弹速度有明显的跳动,选取合理的相位角及过渡圆半径,可以将该跳动值尽可能地降低,即减小炮弹过渡时速度变化量。图11、图12为参数抽样点分析结果拟合的炮弹速度变化量曲面图及其俯视图。
从图5~图12可知:相位角为34°时供弹交接时炮弹有速度变化振动,即此处炮弹有多次撞击,而相位角接近39°而过渡圆半径接近60mm 时炮弹速度变化量趋于增大,因此可得到相位角及过渡圆半径合理的取值范围,又由于加工及装配误差的存在,为保证可靠性,故在取值范围的中心处选择最终的设计参数,即:相位角为37°、过渡圆半径为80mm。
3 结论
同旋向供弹单元结构紧凑,适合对空间要求更严格的无链供弹系统,其中拨弹轮之间的相位角及炮弹轨迹过渡圆半径是决定炮弹交接过程速度变化量值的主要设计参数。以某自动机的供弹系统为例,根据工程设计特点对其中同旋向供弹单元进行了多种设计参数的动力学仿真,将仿真优化结果应用到了实际产品设计中。通过对同旋向供弹单元的动力学仿真分析,得到了此类供弹单元的设计要点及设计方法,对无链供弹系统的设计及优化提供了一定的参考。
(References)
[1]梁世瑞.自动机创新学引论[M].北京:国防工业出版社,2007.LIANG Shirui.The contemporaneity technology of automatic gun[M].Beijing:National Defense Industry Press,2007.(in Chinese)
[2]谈乐斌,张相炎,管红根,等.火炮概论[M].北京:北京理工大学出版社,2005.TAN Lebin,ZHANG Xiangyan,GUAN Honggen,et al.Introduction of gun[M].Beijing:Beijing Institute of Technology Press,2005.(in Chinese)
[3]马福球,陈运生,朵英贤.火炮与自动武器[M].北京:北京理工大学出版社,2003.MA Fuqiu,CHEN Yunsheng,DUO Yingxian.Gun and automatic weapon[M].Beijing:Beijing Institute of Technology Press,2003.(in Chinese)
[4]申培刚.高速无链供弹运动交接动态特性分析[D].南京:南京理工大学,2013.SHEN Peigang.The high-speed linkless feed mechanism kinematic characteristics of theoretical analysis[D].Nanjing:Nanjing University of Science and Technology,2013.(in Chinese)
[5]郭竞尧,刘建斌,李勇,等.小口径自动炮低后坐力射击模式研究[J].中北大学学报:自然科学版,2014,35(3):270-274.GUO Jingyao,LIU Jianbin,LI Yong,et al.The research on low recoil force firing mode of small-caliber automatic gun[J].Journal of North University of China:Natural Science Edition,2014,35(3):270-274.(in Chinese)
[6]陈立平,张云清,任卫群,等.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.CHEN Liping,ZHANG Yunqing,REN Weiqun,et al.The tutorial of mechanic systems using ADAMS[M].Beijing:Tsinghua University Press,2005.(in Chinese)
[7]杜爱民,杜玉彪,楼狄明,等.发动机曲柄连杆机构动力学仿真分析平台研究[J].计算机仿真,2010,27(11):278-282.DU Aimin,DU Yubiao,LOU Diming,et al.Research of platform of dynamics analysis of crank and connection mechanism[J].Computer Simulation,2010,27(11):278-282.(in Chinese)
[8]吴海宝,吴金强.基于UG 和ADAMS的风力发电机组齿轮箱动力学仿真研究[J].机械传动,2011,35(2):13-16.WU Haibao,WU Jinqiang.Study on dynamic simulation of wind turbine gearbox based on UG and ADAMS[J].Journal of Mechanical Transmission,2011,35(2):13-16.(in Chinese)
[9]程刚,张相炎,董志强,等.高速供弹机构运动可靠性仿真研究[J].兵工学报,2011,32(7):801-804.CHENG Gang,ZHANG Xiangyan,DONG Zhiqiang,et al.Simulation research on motion reliability of highspeed feed mechanism[J].Acta Armamentarii,2011,32(7):801-804.(in Chinese)
[10]程刚,张相炎,董志强.供弹动作可靠性仿真研究[J].海军工程大学学报,2011,23(2):72-75.CHENG Gang,ZHANG Xiangyan,DONG Zhiqiang.Motion reliability simulation research on feed mechanism[J].Journal of Naval University of Engineering,2011,23(2):72-75.(in Chinese)