基于舰炮供弹系统控制时序的电气化控制方案探究*
2016-11-07季杰韩峻
季 杰 韩 峻
(1.海军工程大学 武汉 430033)(2.92721部队 舟山 316000)
基于舰炮供弹系统控制时序的电气化控制方案探究*
季杰1,2韩峻1
(1.海军工程大学武汉430033)(2.92721部队舟山316000)
论文基于舰炮供弹系统的控制时序,提出了一种用电信号代替传统机械化传动控制方式的电气化供弹方案,并设计了一套电气化供弹模拟器,运用C8051F020单片机控制LED灯对舰炮供弹系统进行了弹位运动模拟,加入时序控制和供弹结构逻辑控制模拟,实现了对整个供弹程序进行检测、判断、控制和人机交互等功能。
供弹系统; 时序控制; 模拟器; 电气化控制
Class NumberTH12
1 引言
舰炮是舰艇最基本的武器之一,而供弹系统作为舰炮武器的重要组成部分,其可靠性、扩展性和先进性对整个舰炮的性能有着至关重要的影响[1]。目前国内在役的大、中口径舰炮供弹率较低,持续打击能力较差,导致舰炮的作战威力大打折扣,为此,建立一个自动化程度高、性能可靠的舰炮供弹系统具有重要意义[2]。本文基于供弹系统时序关系,尝试用电信号代替传统的机械化传动控制方式,为舰炮的电气化控制做了初步探究。
2 供弹系统的结构组成及时序分析
2.1供弹系统主要结构
舰炮供弹系统负责把弹药从底层舱室运送至炮塔处,主要包括存储单元、转运单元、提升单元和控制单元。存储单元负责炮弹的存储,转运单元负责炮弹的水平转移,提升单元负责炮弹竖直方向的运动,控制单元负责控制各个动作的顺序,使之能互相协调[3~4]。供弹系统先进与否对舰炮威力大小至关重要,AK-176是俄罗斯一款设计较为先进的舰炮[5],本文以此为研究对象,其采用左右交替供弹,因而供弹系统分为左、右两个结构相同部分,这两部分通过机械传动链接起来,并从减速箱获得动力。供弹系统主要结构如图1所示。
2.2供弹系统时序分析
传统的机械化供弹是一个由各结构部件通过机械啮合进行的复杂联动过程,既有传动的衔接,也有时序的重叠,其机构联动过程[6~7]如下(以左侧供弹过程为例):
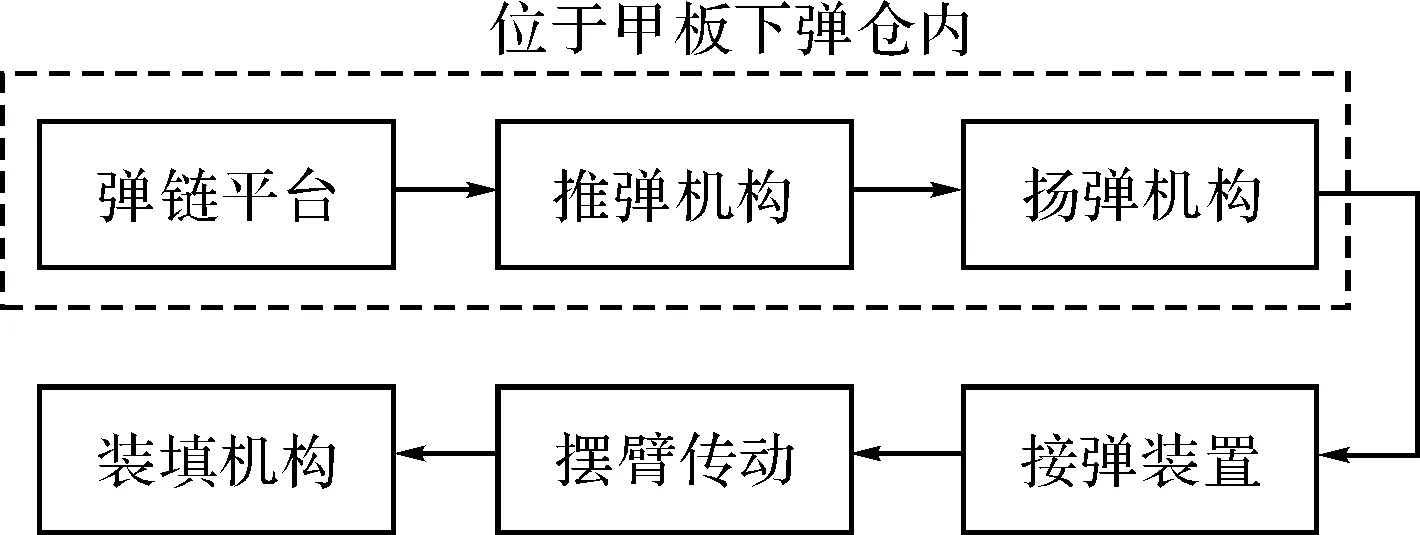
图1 俄罗斯AK-176毫米舰炮供弹系统结构
初始状态,输弹槽、接弹装置和扬弹机口处各有一发弹,左右压弹机在初始位,炮门打开,供弹电机启动,供弹减速箱脱开,扬弹机转换手柄在结合位。
接到击发指令后,带弹的输弹槽下降输弹入膛关门击发,击发后火炮后坐,拨动左压弹机,后坐位移大于340mm时压弹机拨动结束,开始压弹,当压弹机返回初始位时压弹机拨杆与摇架上的杠杆相作用,通过杆系把运动传到供弹结合结构,使左供弹减速箱结合,左侧供弹系统开始工作。并在同一供弹周期内完成下列动作:左摆臂抬起把左接弹装置内的弹送到左装填机构末端位;左扬弹机把其入口处的炮弹提升到接弹装置内;弹链开始运动并把弹送到推弹位;当弹链停止运动后,推弹器把推弹位的这发弹推入扬弹机内,推弹器在弹簧的作用下返回;当摆臂降下时抓住扬弹机新提升进来的炮弹;当供弹循环完成后借助供弹脱开机构使供弹减速箱脱开,左侧供弹系统停止运动。
根据同一供弹周期内完成的动作,补供弹任务可分解为以下五段子系统[8]:首先考虑炮弹在弹链中的运动,时间为T1;再考虑推弹过程,时间为T2,设推弹的推出和复位时间相同,分别为t21和t22,则有T2=t21+t22;接下来是扬弹过程,时间T3;然后是摆弹过程,由于射角不同,以摆弹的两个极限角度分别研究,射角范围-15°~+85°,由摆角β与射角φ关系β=97°-φ可知,摆角的两个极限角度为112°和12°,但摆臂的角度及所用时间差异较小,这里不做深入分析,设摆动到压弹口t41和摆回到接弹装置t42,整个摆弹时间为T4,则有T4=t41+t42;最后是压弹过程,时间为T5。
查阅全炮循环图数据可知:T1=0.74s,T2=0.16s,T3=0.65s,T4=0.71s,T5=0.15s,整个供弹周期为0.96s。为了便于观察和描述,把时间轴换算成角度轴,一个供弹周期相当于角度盘一周360°,则1°=0.96/360=0.002667s,通过换算可以得到T1=277°,T2=60°,T3=243°,T4=266.3°,T5=56.2°。设模拟时长为720°,可得到供弹时序角度盘转动图如图2所示。

图2 供弹时序角度盘转动图
3 供弹系统电气化控制方案
3.1基于供弹时序的电气化控制思路
传统的机械化控制以减速箱为唯一动力源,供弹过程中通过复杂的机械啮合将动力传输至各装置,同时实现各部件的联动。电气化控制将电信号代替机械传动,主要部件(转弹、推弹、扬弹、摆弹、压弹)配置独立电机实现动力源分散,系统根据供弹时序分别对各动力源进行逻辑控制,从而实现各相对独立的子系统进行协调运作。
3.2电气化控制的主要优势
1)系统结构紧凑,占用面积少
电气化控制的最大特点是将供弹系统的各部件从复杂的机械传动结构中解脱出来,实现硬件层面的相对独立,由系统统一根据时序发出的电信号进行配合工作。用电缆代替机械传动部件,可以将舰炮的总体布局设计得更为紧凑,占用面积减少。
2)容易定位故障,维修快速便捷
机械化供弹的硬件是一个整体结构,牵一发而动全身,任何一个细小环节出现问题,都将导致整个供弹系统的瘫痪,而且排除故障较为麻烦,只能根据故障现象进行逐段排查,机械的复杂啮合也为维修带来了很大困难。电气化供弹通过电信号将各硬件进行整合,供弹过程中如果出现故障,根据各子系统反馈的电信号将可以快速定位故障位置,同时高度模块化的设计可以实现故障部件的快速更换,维修难度与维修时间大为改善。
3)设置联锁装置,性能安全可靠
为了防止在舰炮工作期间出现意外而致使火炮和炮弹受损,舰炮供弹系统设有联锁装置。以AK-176毫米舰炮为例,其每一路供弹系统都有5个机电联锁和1个机械联锁,以保证出现故障时断开相应一侧的供弹减速箱。电气化供弹方式下,可将联锁信号与控制时序进行紧密结合,当出现联锁信号与时序不匹配时立即切断电源进行自我保护,电信号传输的快速性可以保证在出现故障时系统识别快、应对快,对舰炮的损失降到最低。
4)自动化程序高,供弹效率提升
电气化控制使得供弹系统更为自动化,机械传动结构的有效减少使得各机构运作效率得到提升,能很好地弥补目前我国大、中口径舰炮存在的供弹率较低这一短板。
4 电气化供弹系统模拟器设计
4.1模拟器设计的目的及意义
系统基于供弹时序关系,采用C8051F020单片机控制LED灯对舰炮供弹系统进行弹位运动模拟[9]。模拟器与舰炮实物具有相同的原理,一方面能直观地展示供弹系统中弹位的运动变化状态,为学员平时的训练和维修提供了一个技术平台;另一方面也是对我国舰炮供弹系统由机械化控制转向电气化控制作出的技术性尝试,具有重要意义。
4.2硬件设计
为了真实还原炮弹在舰炮供弹系统中的运动路径,系统采用了六块电路板分别模拟左右弹链平台(×2)、左右扬弹摆弹机构(×2)、装填机构以及总体控制部分,每部分独立供电。系统核心部件由单片机控制芯片C8051F020、时钟电路、电源模块、ULN2003驱动电路以及LED显示板等组成。硬件整体工作流程:C8051F020根据供弹时序关系,结合定时器产生的脉冲次数,通过驱动电路实现对LED显示板的控制。
LED的设置直接影响到模拟效果,AK-176毫米舰炮弹链平台有75个弹位,为了更好地显示炮弹的步进过程,在每个弹位之间加了一个过渡弹位,同时模拟推弹过程设置10个LED灯,因此弹链平台总共有160个灯,所以选用两片8×10 LED显示板;扬弹过程是一个连续的过程,模拟用16个LED灯来实现,摆弹过程受不同摆动角度的影响,为了模拟效果,只考虑在平射状态下摆动90°用了16个LED灯来显示,因此扬弹摆弹模块选用一片4×8 LED显示板;装填过程同样加入过渡弹位,左右分别用了8个LED灯显示,每进行一次发射就进行一次压弹,相应的炮弹往前步进一个弹位,发射过程用也用了8个LED灯显示,故装填机构模块选用了一片3×8 LED显示板。模拟器的硬件结构及实物图如图3、4所示。

图3 模拟器硬件结构

图4 模拟器实物
4.3软件设计
设计采用中断思路,设定定时器周期性地产生中断,以2.6ms为一个时钟脉冲周期(即时钟脉冲频率f=384.6Hz),计360个时钟脉冲正好作为一个供弹周期,相当于角度盘的360°供弹周期,相应的T1~T5角度值则转化为供弹各子系统所需接收的时钟脉冲数,例如炮弹在弹链中的运动时间T1=277°,表示弹位步进一次需接收277个时钟脉冲。
LED采用动态扫描方式[10],设立两个数组:显示缓存区Dp[i]和弹位寄存器Rd[i]。每个指示灯状态对应一个显示缓存区中的一个状态位,而显示缓存区为8位寄存器相当于一个字节,控制8个LED灯。逻辑程序及时序控制实现对逻辑数组的弹位寄存器内相应数值的变化,进而一一对应显示缓存区的改变,实时反映在每个指示灯的亮暗变化上,从而模拟真实弹位的变化。图5为弹位寄存器Rd[i]左移一位实现相应LED动态变化的图5。
程序运行流程:当系统接收到连杆信号后,启动定时器,中断服务程序中开始记录时钟脉冲数,当达到相应脉冲数时(程序根据图2时序关系提前预设各子系统进行弹位变化所对应的脉冲数),程序即对相应子系统的弹位寄存器Rd[i]进行移位操作,从而实现对应LED的动态变化,直至360个时钟脉冲,即一个供弹周期结束,系统关闭定时器等待下一个连杆信号。图6为中断程序流程图。

图5 LED模拟弹位步进程序设计

图6 中断程序流程图
5 结语
本文以俄罗斯AK-176毫米舰炮为分析对象,对其供弹系统的机械结构及控制时序进行分析,同时提出了一种基于供弹时序关系,采用电信号代替传统机械化传动控制方式的电气化供弹方案,并设计了一套电气化供弹模拟器,模拟器直观展示了供弹系统中弹位的运动变化状态,模拟结果有效验证了供弹系统电气化控制的可行性。
[1] 胡胜海,徐鹏,许伟科,等.大口径舰炮供弹平台控制时序设计与试验研究[J]. 南京理工大学学报,2011,35(2):194-199.
[2] 梁世瑞.自动机创新学引论[M].国防工业出版社,2007:45-48.
[3] 应文健,韩峻,李玉,等.中大口径舰炮电气结构原理与维修[J].海军工程大学学报,2015(2):35-40.
[4] 张相炎.火炮自动机设计[M].北京:北京理工大学出版社,2010:146-149.
[5] 孙维生,李文静,宋永彬.俄76mm舰炮装填机构分析[J].火炮发射与控制学报,2002(1):29-32.
[6] 康郦,张源.浅论单76mm舰炮供弹系统[J].火炮发射与控制学报,1997(2):49-53.
[7] 古刚,葛杨,肖亮.基于时序设计方法的新型供弹系统性能仿真研究[J].哈尔滨理工大学学报,2009,14(4):12-16.
[8] 葛杨,胡胜海,张家泰.新型供弹系统并行时序设计研究[J].哈尔滨工程大学学报,2004,25(5):587-591.
[9] 张培仁,孙力.基于C语言C8051F系列微机控制原理与运用[M].北京:清华大学出版社,2007:134-140.
[10] 郭天祥.新概念51单片机C语音教程[M].北京:电子工业出版社,2007:256-261.
Electric Control Scheme Based on Naval Gun Cannonball Supply System Control Sequence
JI Jie1,2HAN Jun1
(1.Naval University of Engineering, Wuhan430033)(2. No. 92721 Troops of PLA, Zhoushan316000)
This paper uses electric single instead of traditional mechanically transmission, proposes a theory of electric control of naval gun cannonball supply system based on sequential control. By the way, an electric cannonball supply simulator is designed, which used the C8051F020 microcontroller to control the LED to carry out a sport simulation of the naval gun cannonball supply system, joining the sequential control and logic control for structure simulation to realize the cannonball supply system of the whole process monitoring, judgment, control and man-machine exchange function.
cannonball supply system, sequential control, simulator, electric control
2016年4月8日,
2016年5月28日
季杰,男,硕士研究生,研究方向:武器系统运用与保障工程。韩峻,男,硕士生导师,研究方向:兵器测试技术。
TH12
10.3969/j.issn.1672-9730.2016.10.040
