手摇脚踏车的设计
2015-11-23张静吴小平
张静 吴小平
(西南交通大学峨眉校区 四川峨眉 614200)
手摇脚踏车的设计
张静 吴小平
(西南交通大学峨眉校区 四川峨眉 614200)
在自行车早期的设计和发展中,很多人都尝试过将自行车变成可以手摇脚踏自行车,以提高骑行速度,减轻腿部用力,然而最终都因效率低下、安全性差而宣告失败。目前人们仍然在进行不断探索,以期通过手摇脚踏方式能够锻炼全身肌肉。本文以一款已经实现的手摇脚踏自行车为蓝本,研究并分析这种自行车的组成原理和相关尺寸关系。
运动机构 作图法 仿真
引言

1.分析并确定图示机构的运动原理,提出可能的运动机构方案,了解其工作过程;
2.掌握手摇和脚踏两个动力输入的组合方式及输出效果;
3.解决该自行车在骑行过程的转向问题;
4.适用范围体重在40-140kg,身高在1.3米-1.8米;
5.用软件进行可视化仿真。
1.运动机构的设计
设计对象包括车架、前轮、后轮、手摇驱动机构和脚踏驱动机构,手驱动机构连接踏板,脚踏驱动机构驱动连接后轮,脚踏驱动带动后轮上的齿轮运动,齿轮带动后轮运动,后轮将动力传给前轮,从而实现车向前运动。
若要该自行车正常行驶,要确定合理的手柄的摆角Ψ,则要根据人体运动学来确定摆杆的长度;
用UG软件绘制曲柄摇杆运动简图如下:
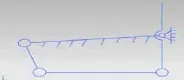
自由度F,F=3n-2pl-ph,F=3*3-2*4=1
用ug软件画出整体的运动简图如下:
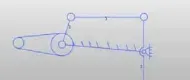
3是曲柄,1是主动件,这是曲柄摇杆机构,其极位夹角为θ=180°(k-1/k+1),设K=1.25,则θ=20°>0.满足曲柄摇杆中有急回特性的条件,即杆1具有急回特性.
2.作图法确定杆长
设人身高1.6m为题目要求1.3m-1.8m的平均身高,手臂平均长为0.5m,脚到胸前的长度约为1.28m,脚到手臂的长度为1.30m,上手柄长为0.8m,下手柄长为 0.48m,根据人体运动学原理和余弦定理 =(1.28^2+1.3^2-0.5^2)/(2*1.3*1.28)=0.925,Ψ=45°.
A,C1,C2三点所在圆和θ角之关系;
AC1,AC2,AB,BC长度关系:
AC1=BC-AB
AC2=BC+AB
AB=(AC2-AC1)/2
比例尺ul=()==0.016

假设A在图示位置,测得0.56m,=0.56m,=0.14m,
已知=0.48m,所以曲柄长0.14m,脚踏板长0.56m,机架长0.56m.
3.检验其结果
1.曲柄是否存在:因为+=+()<+()所以曲柄存在
2.连杆是否顺序到位

设A(0,0),D(1,0)
又因为两个位置的坐标为 (-0.4,2.65),(0.62,0.62)(1.88,2.87),(0.79,0,37).所以=0.137>0,=9.38>0
二者同号,连杆能顺序到位.
3.又因为
曲柄摇杆的的计算公式为:
得出=47°,为了保证机构具有良好的传动性能,设计时通常应使40°.所以此位置的机构和各尺寸长度符合运动条件.
4.建模
1.杆件模型
2.整体模型

设车轮直径为66cm,骑车速度为12km/h,约为3.3m/s;取小齿轮的齿数为z2=34,大齿轮为z1=57,则取传动比为i=z2/z1=0.6.
设车轮半径为r,车转动的角速度为ω,前链轮角速度为ω1,后链轮角速度为ω2=ω,则ω=v/r=3.3(m/s)/0.33m=10rad/s,又n1/n2=z2/z1,所以ω1=2πn1=ω2*i=10*0.6rad/s=6rad/s,n1=57r/min,即为曲柄摇杆中曲柄的转速,曲柄的速度为=*ω1=0.14m/s*6rad/s=0.84m/s.
[1]机械设计、机械设计基础课程设计,王昆等主编,北京:高等教育出版社,1996
[2]机械设计、机械设计基础课程设计,王昆等主编,北京:高等教育出版社,1996
[3]机械零件设计手册(第二版)/中册,东北工学院《机械零件设计手册》编写组编,冶金工业出版社,1982
[4]孙恒陈作模葛文杰.机械原理(第七版).北京:高等教育出版社,2006
[5]安琦王建文.机械设计课程设计.上海:华东理工大学出版社,2012
[6]吴宗泽.机械零件设计手册【2】.北京:机械工业出版社,2004.
