基于MATLAB的升降式抖动机构运动仿真
2015-11-17郭春华吴光庆秦亚奇
郭春华,史 霄,吴光庆,秦亚奇
(中国电子科技集团公司第四十五研究所,北京 101601)
基于MATLAB的升降式抖动机构运动仿真
郭春华,史 霄,吴光庆,秦亚奇
(中国电子科技集团公司第四十五研究所,北京 101601)
通过对晶圆清洗过程中常用抖动机构的分析,将其等效为偏心曲柄-滑块机构。建立数学模型,分别推导出曲柄的角位移、角速度、角加速度和滑块的位移、速度、加速度,并应用MATLAB软件进行仿真,得到了滑块的位移、速度及加速度曲线。
晶圆;清洗;抖动机构;偏心曲柄-滑块
随着半导体技术的不断发展,对工艺技术的要求也越来越高,特别是对晶圆的表面质量要求也越来越严[1]。仅仅除去晶圆表面的污染物已不再是最终的要求[2],在清洗过程中造成的表面化学态、氧化膜厚度、表面粗糙度、表面均匀性等也已成为同样重要的参数。根据文献统计,目前由于清洗不佳引起的产品失效已超过半导体制造中总损失的一半[3]。因此,晶圆清洗技术成为晶圆加工、半导体制造和超大规模集成电路等工艺研究的一大热点。
目前已研制出的晶圆清洗技术主要有:湿法化学清洗、超声波清洗、兆声清洗、鼓泡清洗、RCA清洗、等离子体清洗等,这些方法和技术已被广泛应用于半导体圆片的清洗工艺中。其中湿法化学清洗是指利用各种化学试剂和有机溶剂与吸附在被清洗物体表面上的杂质及油污发生化学反应或溶解作用,或伴以超声、加热、抖动等物理措施,使杂质从被清洗物体的表面脱附(解吸),然后用大量高纯热、冷去离子水冲洗,从而获得洁净表面的过程[4]。
常用的湿法化学清洗系统主要包括一组湿法化学工艺槽和抖动装置,即在工艺槽中浸入一可以带动晶圆做升降式运动的抖动机构,通过带动晶圆做上下往复搅拌[5],增加晶圆表面与清洗液的摩擦面积和摩擦力,进而达到晶圆与污染物分离的目的。
1 抖动机构工作原理
图1所示为晶圆清洗过程中常用的抖动机构。可以看出,其主要由片盒、花篮、花篮定位块、提篮、提篮调节板、提篮压块、抖动上连接板、抖动下连接板、防护罩、导向机构、连杆机构、滑动组件、偏心轮机构、检测开关和驱动单元等组成。

图1 抖动机构
工作原理:需要清洗的晶圆放置在片盒中,片盒固定在花篮中,花篮通过花篮定位块固定在提篮上,提篮安装在提篮调节板上,为防止提篮移动,采用提篮压块将其压紧。
驱动单元带动偏心轮机构运动,偏心轮机构带动连杆机构运动,连杆机构带动滑动组件沿导向机构上下滑移,从而通过抖动上连接板和抖动下连接板带动提篮做上下往复运动。
由此可知,驱动单元带动偏心轮机构转动,与偏心轮机构连接的连杆机构将旋转转化为直线运动,带动滑动组件实现垂直方向的往复运动,进而带动提篮做垂直方向的升降运动,完成片盒及晶圆在工艺槽中的搅拌,达到清洗晶圆的目的。
2 曲柄-滑块机构
曲柄-滑块机构是由曲柄(或曲轴、偏心轮)、连杆和滑块通过移动副和转动副所组成的机构[6],如图2所示。常用于将曲柄的回转运动变换为滑块的往复直线运动,或者将滑块的往复直线运动转换为曲柄的回转运动。曲柄-滑块机构可通过改变偏心距来得到不同的急回特性。
对曲柄-滑块机构进行运动特性分析时,是当已知各构件尺寸参数、位置参数和原动件运动规律时,研究机构其余构件上各点的轨迹、位移、速度和加速度等,从而评价机构是否满足工作性能要求以及机构是否发生运动干涉等。曲柄-滑块机构具有运动副为低副,各元件间为面接触,构成低副两元件的几何形状比较简单,加工方便,易于得到较高的制造精度等优点,因而在各类机械中得到了广泛的应用[7]。其优点如下:
(1)面接触为低副,压强小,便于润滑,磨损轻,寿命长,传递动力大;
(2)低副易于加工,可获得较高精度,成本低;
(3)杆可较长,可用作实现远距离的操纵控制;
(4)可利用连杆实现较复杂的运动规律和运动轨迹。
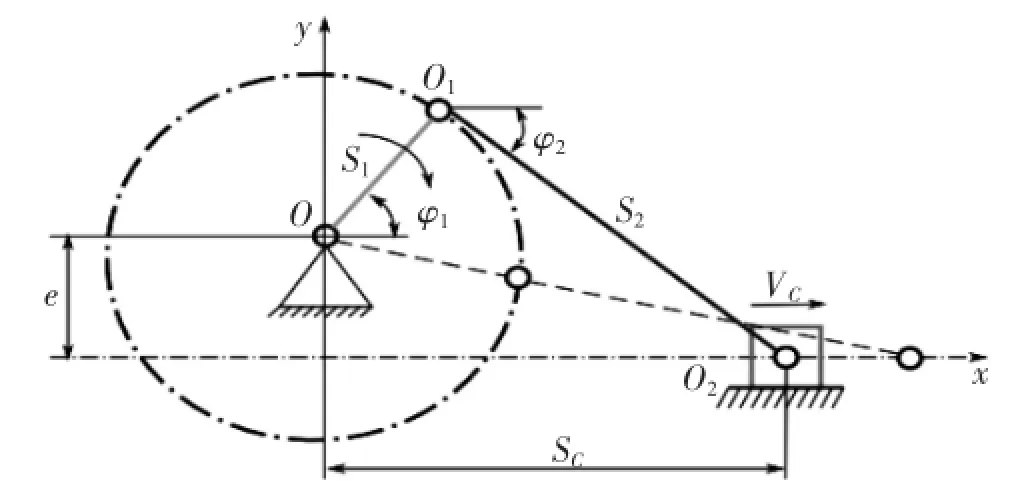
图2 抖动机构等效数学模型
3 等效数学模型
通过上述分析可知,抖动机构实际上可简化为一偏心曲柄-滑块机构,其等效简图如图2所示。设曲柄和连杆的长度分别为S1和S2,偏心距为e,原动件曲柄的角速度为ω1,角位移为φ1,连杆的角位移为φ2,各参量意义详见表1所示。建立如图2所示坐标系,由曲柄-滑块机构的矢量封闭图可得:

将式(1)整理、求导分别得连杆的角位移φ2、角速度ω2、角加速度a2:

4 算例仿真
根据式(1)-(3),结合抖动机构工作实际,系统参数如表2所示。

表1 物理量索引

表2 曲柄-滑块机构系统参数
设φ1的初始值为0,当φ1变化时,连杆的角位移、角速度和角加速度以及滑块的位移、速度和加速度的变化值可计算求得。曲柄角位移φ1在0~360°之间变化时,在MATLAB的计算窗口输入推导出的公式后,滑块的位移、速度和加速度变化曲线仿真结果分别如图3、图4和图5所示。
由图3和图4可以分析出,抖动机构的时间-位移曲线为一光滑的正弦曲线,曲线等振幅不收敛;时间-速度曲线为一光滑的正弦曲线,曲线等振幅不收敛,表明机构运行历程较连续。图5所示的时间-加速度曲线在某些时间出现尖点和跳跃,表明机构在这个历程出现轻微振动或冲击,出现这种情况的原因可能是结构设计欠合理或装配误差所导致,导致滑移机构升降不平稳。仿真结果使机构的运动轨迹可视化,从而有效指导了机构的优化设计。

图3 时间-位移曲线

图4 时间-速度曲线

图5 时间-加速度曲线
5 结束语
通过对抖动机构的分析,将其等效为偏心曲柄-滑块机构,建立数学模型,分别推导了曲柄的角位移、角速度、角加速度和滑块的位移、速度、加速度。应用MATLAB软件对所求得公式迭代,输出仿真特性曲线,使抖动机构的轨迹可视化,从而有效指导机构的优化设计。
[1]张士伟.半导体晶圆的污染杂质及清洗技术[J].电子工业专用设备,2014,43(7):18-21.
[2]刘红艳,万关良,闫志瑞.硅片清洗及最新发展[J].中国稀土学报,2003,21(增刊):144-149.
[3]储佳,马向阳,杨德仁,等.硅片清洗研究进展[J].半导体技术,2001,26(3):17-19.
[4]刘传军,赵权,刘春香,等.硅片清洗原理与方法综述[J].半导体情报,2000,37(2):30-36.
[5]万弋,张继静,刘鸿儒.有机清洗槽共振与噪声控制方法研究[J].电子工业专用设备,2012,41(5):43-47.
[6]王知行,刘延荣.机械原理[M].北京:高等教育出版社,2006.
[7]成大先.机械设计手册(第五版,第1卷)[M].北京:化学工业出版社,2011.
Motion Simulation of the Lift Type Shaking Mechanism Based on MATLAB
GUO Chunhua,SHI Xiao,WU Guangqing,QIN Yaqi
(The 45thResearch Institute of CETC,Beijing 101601,China)
Through the analysis of the common shaking mechanism in the process of wafer cleaning,it is equivalent to the eccentric crank-slider mechanism.The mathematical model is established,the angular displacement,angular velocity,angular acceleration of crank and displacement,velocity and acceleration of slider are deduced respectively,and the displacement,velocity and acceleration curves of slider are obtained by using MATLAB software.
Wafer;Cleaning;Shaking mechanism;Eccentric crank-slider
TH132
B
1004-4507(2015)12-0038-04
郭春华(1985-),男,河北保定人,助理工程师,毕业于北京工业大学机械工程专业,工学硕士,目前主要从事半导体湿法清洗设备的设计与研究工作。
2015-11-30
