某小型自航绞吸挖泥船快速性研究
2015-11-17思李
李 思李 允
(1.宁波海事局 宁波 315020;2.中国人民解放军92713部队 宁波 315020)
某小型自航绞吸挖泥船快速性研究
李 思1李 允2
(1.宁波海事局 宁波 315020;2.中国人民解放军92713部队 宁波 315020)
为了研究如何在恶劣条件下保障小型自航绞吸挖泥船快速性,文章采用数值模拟的方法,在船-桨系统下对某自航绞吸挖泥船进行快速性研究,论述了船首槽道尺寸对阻力的影响,船体、导管螺旋桨水动力性能受桨轴浸深影响的变化规律,并设计出推进器的优化使用方案。
绞吸挖泥船;快速性;导管螺旋桨;浸深
引 言
在社会不断发展、船舶设计提倡一体化、模块化,更强调绿色造船设计理念的今天,船舶快速性研究显得十分重要。大型与小型自航绞吸挖泥船的设计理念不同,研究侧重点也各不相同。作业于内河水域的小型自航绞吸挖泥船属于内河浅吃水肥大型船,吃水要求苛刻、方形系数较大、船首线形特殊(有绞刀槽道),在设计中布置困难较大、快速性的保障也是关键问题之一。本文以作业于黑龙江中游水域的某小型自航绞吸挖泥船为重点进行了快速性研究。
1 船 型
1.1 主尺度
设计船型作业水域为黑龙江中段,黑河至伯力(哈巴罗夫斯克)河段,沿小兴安岭东侧,流至三江平原,水道崎岖复杂,深浅变化较大。21世纪80年代以前,航道平均水深在5~6 m,浅滩枯水期不足3 m。随着气候变化,水位逐年下降,目前,该段航道平均水深为3~5 m,浅滩枯水期水深甚至只有1.8 m。
综合考虑航道特征、作业功能、总体布置、桥梁和船闸限制等方面。参考相同疏浚能力的绞吸挖泥船,基于船舶的实际需要、设备尺寸等因素,确定船舶设计主尺度(见表1)。

表1 主尺度
1.2 推进系统
我国电力推进系统在小型船舶中的应用并不普及[1]。电力推进功率利用率高、布置灵活、操作方便,虽然初期投入较高,但长期来看经济性好。本船选用同步柴油机、交流电力推进设备,选取具有0.65 m的可调浸深的舵桨装置推进,设计推进器为19A导管,Ka型导管螺旋桨,螺距比为0.98。
1.3 模 型
本文采用CATIA对船舶进行数值模拟,能够较好地模拟船体形状,模型见图1、图2。

图1 螺旋桨模型示意图
图2 船-桨模型示意图
1.4 网格划分
1.4.1 网格选取
在CFD计算中采用的网格,可以分为结构化网格和非结构化网格[2]。Star-CCM+的Trim网格(六面体核心网格)具有结构化网格计算稳定且易于收敛的特点,又同时兼具非结构化网格适应性良好的特点,能够保证对于自由液面捕捉精确性[3]。本文在计算船体阻力时对于计算域采用Trim网格进行划分。在进行螺旋桨敞水计算模拟和船-桨模型计算模拟时,为精确模拟流场的情况,采用两套网格,外域用Trim网格进行填充,内域用Advancing Layer Mesher网格进行填充。
1.4.2 网格加密
本文对船体周围网格、自由液面网格、螺旋桨网格和交换面网格着重进行加密。图3为螺旋桨模型网格加密示意图。

图3 螺旋桨模型网格加密示意图
当处理近壁面流动时,引入无量纲参数 y+[4],一般较好的第一个网格点位置应是使y+处于30到500之间。本文边界层网格的最小网格尺度?,按下式计算[5]:

式中:L为模型设计水线长;y+为近壁面第一层网格的无量纲距离;Re为雷诺数。本文取y+=100来划边界层网格,wall y+满足要求。
1.4.3 网格数量
Tzabirasf 的研究表明:当网格尺度达到一定限值后,即使网格数量提高 50%,对于计算结果的影响也不大[6]。本文首先进行网格划分的试算。取航速在3 m/s的情况进行试算。当网格数量在313万时,误差为2.7%;当网格数量在246万时,误差为3.9%;当网格数量在209万时,误差为5.1%。综合计算机硬件水平能达到的计算效率,本文根据网格数量为230万左右范围设定网格尺寸进行计算。通过改变船体表面网格尺寸、体网格尺寸的设置来控制网格数量。
2 理论基础
2.1 船舶阻力
船体总阻力由兴波阻力、摩擦阻力和粘压阻力构成。浅水航道对于船舶阻力的影响很大。目前主要有三种方式计算船体阻力:经验公式法、试验方法、CFD模拟方法。CFD方法具有较高的精度、时间、经济优势,并且能展示流场中细节。
2.2 面元法
螺旋桨水动力研究方法有升力线理论、升力面理论和面元法等方法[7]。面元法将求解整个三维流场中速度场的过程转化为任意边界面上奇点强度求解[8]。其对螺旋桨的压力分布、推力及转矩的预报具有较高精度。
2.3 数值模拟理论
CFD是计算流体力学的简称,该方法将流体运动、传热等的偏微分方程组都通过计算机求解[9]。其优点在于能用较少的时间、费用获得大量研究结果[10]。本文采用的Star-CCM+软件将网格划分、求解、后处理等功能集于一体,数值算法稳健准确、物理模型覆盖面宽广[11]。
本文研究流体假设为粘性不可压缩,可忽略其热交换量,需要遵守质量守恒方程和动量守恒方程。SST k-ω模型综合了标准k-ω模型在近壁区计算及RNG k-ε模型在远场计算的优点,在求解湍流粘度时计及湍流剪切应力输运的影响[12],考虑了正交发散项。SST k-ω模型对逆压梯度流动,近壁区及远场的计算,均能达到比较好的结果。因此本文的湍流控制方程采用SST k-ω模型。
现有的运动界面追踪问题的数值求解方法主要包括VOF、Level set、相域法等。本文采用的是能有效处理复杂几何体及波浪破碎影响的VOF法。
3 船型优化
3.1 CFD方法精度验证
为验证CFD方法研究船舶阻力的精度,本文将CFD数值模拟计算结果与船模试验结果进行对比,见图4。

图4 CFD模拟与实验结果对比图
可以看出,用CFD方法模拟船舶阻力的误差在5%左右,达到工程研究需要。在低航速情况下Star-CCM+的模拟结果较为准确。本文中航速变化范围在1.5~4 m/s以内,结果能达到精度的需要。
3.2 槽道尺寸对船体阻力的影响
槽道的存在影响水面垂向振荡情况,会使船首波波峰后移,兴波明显,阻力增加。水流在开口区域会形成涡流,增加了船首与开口之间的压力梯度,形成形状阻力。槽道处流速较小,会造成压差阻力。

图5 船首槽道流场细节图
在进行船型优化时,尺寸和排水量的限制要求对型线不能作太大调整。通过对船首流场的分析,本部分在5 m水深、航速为3 m/s情况下,对其他尺寸均相同仅槽道尺度变化的四个船模进行阻力计算,槽道尺寸及阻力计算值见表2。

表2 各船模裸船阻力
可以看出槽道船长比在10%时阻力最大,并随着槽道长度的逐渐增大,阻力逐渐减小。这是由于水流遇到槽道后一部分从船底流过,一部分受到船首冲击生成波浪。而槽道产生的波浪会与船体兴波相叠加。当槽道长度小于某一数值时,随着槽道增长,波浪区会增大,从而造成船舶阻力进一步增大。但是当槽道长度继续增大时,高波浪区的范围有所减小,叠加效果有所弱化,导致船舶阻力增加值减小。
这也充分说明了不考虑首部槽道的影响采用图谱或经验公式的估算方法,会造成极大误差。
3.3 航道对阻力的影响
本船作业区域航道变化较大,必须考虑航道对船舶阻力的影响。本文采用CFD方法,对设计船型在不同航道的阻力情况进行预报,见图6。
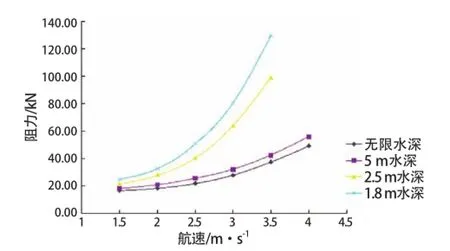
图6 不同航道情况下裸船阻力预报
4 船-桨系统下的推进性能优化
本节模拟实际航行状况,研究船体与导管螺旋桨的相互干扰,着重探讨在船体干扰下导管螺旋桨浸深变化对推进性能的影响。
4.1 CFD模拟精度验证
敞水实验值与模拟计算值随进速系数变化对比图见图7。

图7 CFD模拟与实验结果对比图
综合计算结果,Star-CCM+软件模拟的导管螺旋桨的敞水水动力性能,与实验结果平均误差均在5%以内,达到工程上对推进性能数值预报的需要。
4.2 水深对导管螺旋桨推进性能干扰
结合航道水深变化范围,在研究浅水对导管螺旋桨推进性能的影响时,计算水深为5 m和1.8 m、航速为2 m/s、3 m/s和4 m/s时,导管螺旋桨的推进性能,计算结果见表3。

表3 水深对导管螺旋桨推进性能影响
由表3可见,导管螺旋桨推进性能受水深影响不大且趋势相同,在下文的计算中,仅就5 m水深情况下开展进一步研究。
4.3 导管螺旋桨浸深对船体水动力性能干扰
本节对水深5 m情况下,航速分别为3 m/s、4 m/s,螺旋桨浸深分别为0.63 m、0.83 m、1.18 m的船体阻力进行计算。结果见表4。
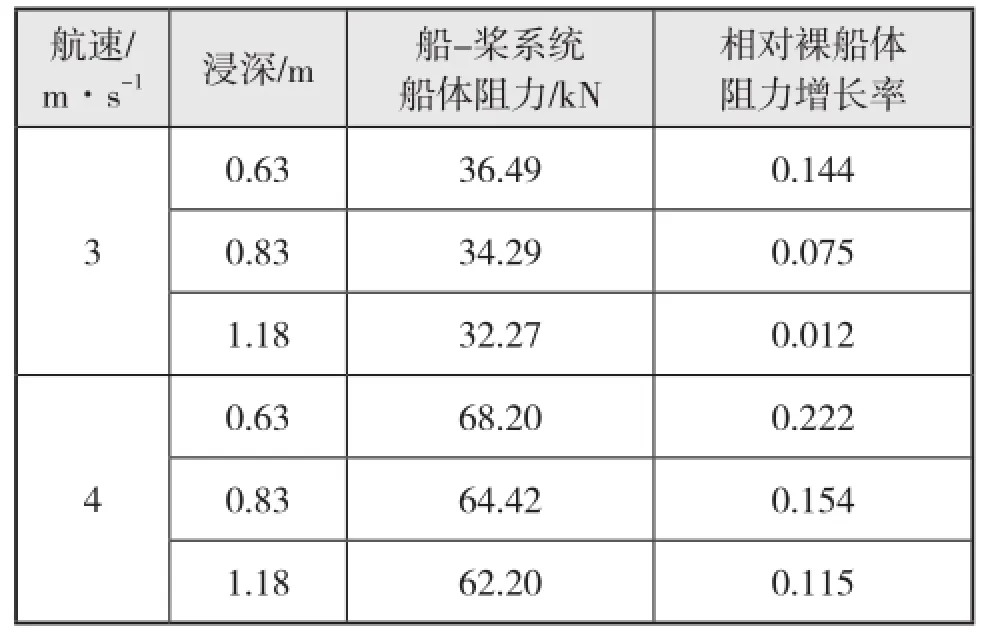
表4 船-桨系统下导管螺旋桨浸深对船体阻力的影响
由表4可见,航速相同时,螺旋桨浸深越大,对船体阻力的影响越小。浸深相同时,随着航速的增加,螺旋桨对船体的阻力影响也增大。
4.4 浸深对导管螺旋桨水动力性能干扰
4.4.1 计算结果
本节选取船舶航速为1 m/s、1.5 m/s、2 m/s、2.5 m/s、3 m/s、3.5 m/s、4 m/s时,导管螺旋桨浸深 为 0.48 m、0.53 m、0.63 m、0.83 m、1.18 m等35种工况,计算不同工况时导管螺旋桨单桨的桨叶推力、导管推力和螺旋桨转矩。
从图8可以看出,在航速比较小的情况下,浸深对于螺旋桨的推力系数影响较大;在伴随着航速的减小,浸深对螺旋桨的推力系数的影响加大;在相同航速情况下,不同的浸深对于推力系数的影响也不同,浸深越小,对推力系数影响越大。当沉深比H/T<0.63,螺旋桨的推力系数显著降低。

图8 螺旋桨推力系数随航速浸深变化曲线
转矩系数、导管推力系数、螺旋桨推力系数变化趋势相同。在各个浸深状态下,船体航速超过3 m/s后,推力系数趋于相同。当浸深较小(比如Hs=0.53 m)时,推力系数首先随着航速的增加而增加;当航速达到3 m/s后,推力系数又逐渐下降。
在浸深为0.83 m和浸深为1.18 m时,无论是导管螺旋桨推力系数曲线、导管推力系数曲线还是扭矩系数曲线,均非常接近;而在低航速时,没有出现推力系数明显削减情况。

图9 导管推力系数随航速浸深变化曲线

图10 转矩系数随航速浸深变化曲线
4.4.2 结果分析
由图11可见,在浸深相同时,航速越小,螺旋桨对自由液面的抽吸作用越强,导管内的空气比重越大。此时螺旋桨没有充足的来流供应,因而导致螺旋桨的推进能力下降。可以想见,在系柱状态下自由液面对螺旋桨性能影响将达到最大。这种现象的出现,不仅会导致推进性能恶化,甚至会引起船体振动以及螺旋桨损伤。

图11 不同浸深、航速下导管螺旋桨气液分布图
在航速相同时,随着浸深的减小螺旋桨的抽吸作用越发明显,导管内的空气比重越大、供流越不足,导管螺旋桨推进性能的损失越大。当沉深比H/T<0.6时,导管螺旋桨出现强烈的吸气现象,将使其推力系数显著降低。
在浸深为0.83 m和浸深为1.18 m的情况下,各曲线趋于相同,这是因为在达到一定浸深后,螺旋桨基本不再受到自由液面影响,螺旋桨的工作状态相对稳定。也充分说明了在浸深较小时,对螺旋桨推进性能的干扰主要来源于自由液面。

图12 不同浸深、航速下导管螺旋桨自由液面图
结果表明:航速越小,浸深对推力系数的影响越大。这是因为当浸深比较小时,螺旋桨桨梢接近自由液面,而小航速的螺旋桨处于叶梢部分压力较大的重载状态,对自由液面的响应更敏感。
推力系数随浸深变化曲线因在前一个阶段螺旋桨的抽吸作用影响较大,抽吸作用随着船体航速的增加逐渐减弱,来流进速趋于平稳,推力系数呈增大趋势;但随着航速进一步增大,来流质量不再有明显变化,此时螺旋桨的推力系数开始呈现航速越大,推力系数越小的趋势。
4.4.3 可调浸深导管螺旋桨优化使用方案
根据本文的计算结果,螺旋桨浸深越大推力系数越高,推进性能越好,同时对于船体阻力的干扰越小。但是,在自航绞吸挖泥船实际工作中,受航道环境影响,如果为了达到推进性能的最佳而忽略了现实环境,可能造成螺旋桨碰撞、损坏等一系列后果。
根据本文计算结果,在本艘自航绞吸挖泥船工作时,若水深达到2.5 m或2.5 m以上时,可以将螺旋桨浸深调至0.83 m,这样既能够保证螺旋桨的推进性能,又不至于损伤螺旋桨。当航道水深小于2.5 m大于1.5 m,将浸深调至0.63 m,此时螺旋桨与水底能保持0.25 m的安全距离。在这个状态下,虽然一小部分螺旋桨超基线,但是减少了螺旋桨受自由液面的影响,推进性能的改善相当可观。
根据计算,在不调节螺旋桨浸深状态,即螺旋桨浸深为0.53 m时,系柱推力很小,推进性能差、起航加速慢。因此,结合计算结果,本文推荐在起航时尽量将浸深调至0.63 m以上,若环境允许,可保证达到0.83 m,从而达到较好的起航效果。在航行过程中,根据对航道水深的监测,选用不同的浸深,以减少自由液面影响,提高推进效能,达到最好的推进效果,尽可能保证船舶在2.5 m/s以上的航速航行。
5 结 论
本文通过对某自航绞吸挖泥船进行快速性研究,得出以下结论:
(1)小型自航绞吸挖泥船浅水效应明显、船首槽道对阻力响应敏感,在设计中可以选用数值模拟的方式估算阻力。Star-CCM+模拟计算挖泥船船体及导管螺旋桨的水动力性能是满足工程精度要求的。
(2)挖泥船船体阻力与槽道长度并不成正相关性。当阻力达到峰值后,随着槽道的加长阻力将减小。在对小型自航绞吸挖泥船进行型线优化时,可将重点放在首部槽道的尺度优化上。
(3)在船-桨系统中,受推进器干扰,船体阻力会比裸船时偏大。航速相同时,导管螺旋桨浸深越大,对船体阻力的影响越小;浸深相同时,随着航速的增加,导管螺旋桨对船体阻力的影响增大。导管螺旋桨推进性能受水深的影响比较小,受自由液面的影响比较大。小型自航绞吸挖泥船在浅吃水的情况下,配备可调浸深螺旋桨、采用推进器优化使用方案是十分有益的。
[ 1 ] 宋旭.电力推进在小型船舶中的实用性研究[D].哈尔滨工程大学. 2011.
[ 2 ] 任志安.离心泵内流动数值模拟研究[D].中国石油大学. 2009.
[ 3 ] 张英朝,赵婧,邵书鑫.基于STAR-CCM+的FSAE赛车空气动力学数值仿真研究[C].CDAJ-China中国用户论文集. 2011:1-9.
[ 4] Mc Graw-Hill.Schlichting H.Boundary Layer Theory[M]. New York.1979.
[ 5 ] 赵大刚.船-桨-舵-舵球式推力鳍系统水动力性能数值计算[D].哈尔滨工程大学. 2012.
[ 6 ] Tzabiras G D. A numerical study of turbulent flow around the stern of ship models[J].International Journal for Numerical Methods in Fluids.1991,13(9):1179-1204.
[ 7 ] 广东工学院造船系编写组.船用螺旋桨设计[M].北京人民交通大学出版社. 1976.
[ 8 ] 张赫,崔和.面元法预估导管螺旋桨水动力性能[J].水雷站与舰船防护. 2013(3):33-37.
[ 9 ] 蒋一.基于CFD的超高速三体滑行艇快速性分析[D].哈尔滨工程大学. 2013.
[10] 高秋新.船舶CFD研究进展[J].船舶力学. 1998(4):74-78.
[11] 邹泽.浅水航道舵桨推进性能研究[D].哈尔滨工程大学. 2012.
[12] 李晓姣.黑龙江浅吃水航标船尾型论证研究[D].哈尔滨工程大学. 2013.
On power performance of small self-propelled cutter suction dredger
LI Si1LI Yun2
(1. Ningbo Maritime Safety Administration, Ningbo 315020, China; 2. Troop 92713 PLA, Ningbo 315020, China)
This paper carries out numerical simulation of a self-propelled cutter suction dredger with ship-propeller system to ensure its power performance under harsh conditions. It discusses the eff ect of the size of channel at fore body of the ship on the resistance, and the impact of the shaft submergence depth on the hydrodynamic performance of the hull and the ducted propeller, and the propulsor is designed for optimized application.
cutter suction dredger; Star-CCM+; ducted propeller; submergence
U661.31
A
1001-9855(2015)06-0013-07
2015-03-12;
2015-04-22
李 思(1990-), 女,硕士,研究方向:船舶与海洋结构物设计制造。
李 允(1989-), 男,硕士,研究方向:船舶与海洋结构物设计制造。
