电动助力转向系统鲁棒控制研究
2015-11-14张春鹏
刘 罡,张春鹏
(合肥学院 机械工程系,安徽 合肥 230601)
电动助力转向系统鲁棒控制研究
刘罡,张春鹏
(合肥学院机械工程系,安徽合肥230601)
针对汽车电动助力转向系统本文应用了H∞控制方法.首先建立电动助力转向系统的模型,然后建立了系统状态空间方程,最后在此基础上利用线性矩阵不等式(LMI)所设计的控制器使闭环系统有好的性能及稳定的鲁棒性,从而获得较好的助力转向特性.
电动助力转向;H∞;线性矩阵不等式;路感
1 前言
近年来汽车电动助力转向系统的控制研究也有了更深入的发展.其中H∞控制理论的提出是现代控制理论发展中的重要方向.文献[1]提出了H∞控制的思想.这一方面很好地解决了系统鲁棒性和系统性能问题.
2 汽车电动助力转向系统模型的建立
2.1EPS的模型
为分析问题方便,转向盘固定,以齿条所受地面冲击为输入,并以转向盘固定不动所需的力矩为输出得到系统模型[2]如图1所示.
图中:Ks—扭矩传感器扭转刚度;Tm—助力电机扭矩;mr—齿条、小齿轮在齿条上的当量质量;xr—齿条位移;Kr—齿条阻尼刚度;Cr—齿条阻尼系数;Jm—助力电机转动惯量;θh—方向盘转角;Km—电动机刚度;Cm—电动机阻尼系数;gm—减速机构传动比;rp—小齿轮分度圆半径;Ftr—作用到齿条上的路面干扰;θm—电动机转角;Tsw—方向盘作用扭矩,即扭矩传感器的输出值.
对转向轴进行动力学分析,可得以下方程

系统采用直流电机,其输出为

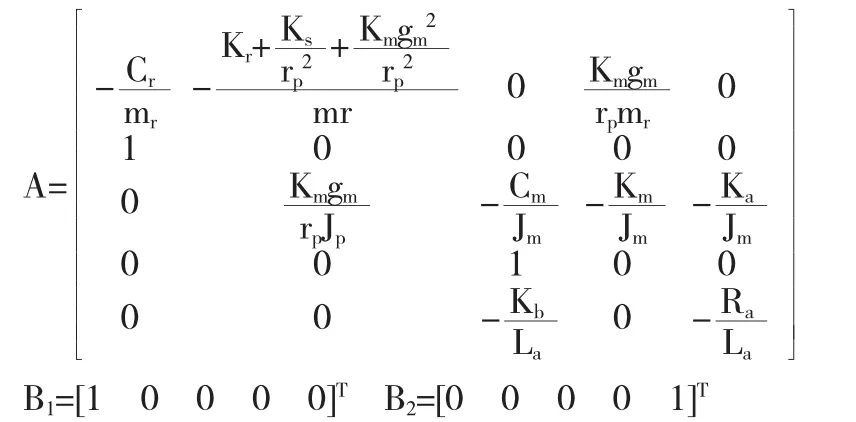
由式(1)~(2)得到系统的状态方程为

控制输入u=[ua]
路面干扰信号w(t)=Ftr
3 H∞控制设计

图2 H∞原理图
图中w为输入信号,z为受控输出信号,u为控制信号,y为测量输出信号.G和K分别表示被控装置和控制器.状态空间描述如下

对于广义被控对象,H∞控制就是要设计输出反馈控制器u=k(s)y
⑴闭环系统稳定;
⑵分别用T∞(s)作为从w到z∞的闭环传递函数,满足||T∞(s)||<1.
3.1H∞最优控制器设计
由于汽车的行驶条件复杂,外界干扰因素较多,采用鲁棒性较强的H∞控制方法较为合适.为了获得理想的汽车操纵稳定性,EPS应满足以下要求:
3.1.1为了保证驾驶员有较好的操纵感,应使路面的干扰信号到传感器的测量力矩Tsw之间有低通滤波作用,一般其截止频率围为15H z以下[4];
3.1.2有足够的反应灵敏度;
由于状态变量xr、θm不能直接测量,输出反馈H∞控制更具有实际意义.基于此,选取传感器测量力矩Tsw作为测量输出变量,即取测量方程为

系统的性能评价指标可表示为

EPS系统主要是为了提高操纵轻便性,并使驾驶员有较好的路感.
本文取权函数

为了保证EPS的灵敏度,取权函数:

4 仿真计算与结果分析
Ks=90,mr=32k g,Kr=91061.4N/m,Cr=653.203N.s,Jm=0.0004704k g.m2,Km=125N.m.rad-1,Cm=0.003339N.m.rad-1.s,gm=7.225,rp=0.007783m,Ka=0.02,La=0.01H,Ra=0.01Ω,Kb=0.02.取以上仿真参数[5]在Matlab7.1中应用LMI工具箱进行仿真[6].输出反馈控制器K可由对应的增广矩阵P来求解相应的求取命令P=ltisys([A,[B1,B2],[C1;C2],[D11,D12;D21,D22]).反馈系数矩阵K的求取命令msfsyn.通过计算可得K=1.0e-003*[0.0115 0.1744 0.0001 0.0001 0.0000],闭环系统性能指标为8.2803e-004,闭环系统极点为1.0e+003*[-0.0097+1.9177i -0.0097-1.9177i-0.0040+0.0589i-0.0040-0.0589i-0.0010].可知闭环系统稳定.图3为EPS系统在8H z和14H z下,应用H∞控制策略,从输入力矩到把持力矩之间传递函数的频率特性.增益越小传到方向盘的力矩越小.图4所示为方向盘把持力矩的阶跃响应.从图中可以看出,无控制系统的增益比有控制的转向系统大.不同的截止频率主要影响动态响应.在截止频率过大时,响应不平稳,会产生“打手”现象;截止频率过低,则出现驾驶时缺乏路感的现象.图5为方向盘把持力矩的脉冲响应.显见,采用不同的截止频率对其动态响应也有较明显影响.

图3 EPS频率特性图
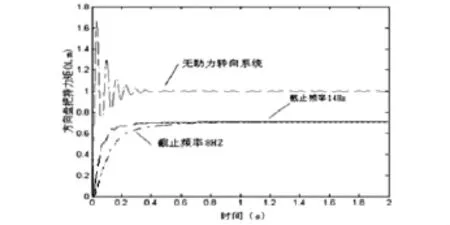
图4 方向盘把持力矩的阶跃响应
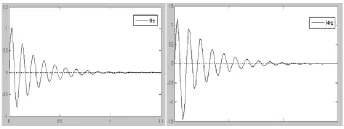
图5 方向盘把持力矩的脉冲响应图
5 结论
本文对EPS的转向系统模型采用H∞控制进行分析,运用matlab工具箱进行仿真研究.这种控制策略使系统具有良好的稳定性和抗干扰能力,同时提高动态响应特性.EPS系统不但可以提高汽车的操纵性;同时能够保证驾驶员获得良好的路感,获得较好的助力特性.
〔1〕Bernstein D S et al·LQG Control with an H∞Performance Bound:Riccati Equation Approach[J].IEEE Trans.Automat Control,1989,34(4).
〔2〕喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2005.
〔3〕梅生伟,申铁龙,刘志康.现代鲁棒控制理论与应用[M].北京:清华大学出版社,2002.
〔4〕Nobuo Sugitani,Yukihiro Fujuwara,Kenko Uchida,Masayuki Fujita.Electric Power Steering With H-infinity Control Designed to Obtain Road Information[J].IEEE International Conference on Robotics and Automation,Proceeding 2000.4.
〔5〕徐建平,何仁,苗立冬.电动助力转向系统的建模与仿真分析[J].中国汽车工程学会,2003学术年会.
〔6〕俞立.鲁棒控制—线性矩阵不等式处理方法[M].北京:清华大学出版社,2002.
T P271.2
A
1673-260X(2015)11-0012-02
