地球静止轨道粗定位的北斗系统接收机快速定位方法*
2015-11-05靖守让李柏渝刘文祥孙广富
靖守让,李柏渝,刘文祥,孙广富
(国防科技大学 电子科学与工程学院, 湖南 长沙 410073)
地球静止轨道粗定位的北斗系统接收机快速定位方法*
靖守让,李柏渝,刘文祥,孙广富
(国防科技大学 电子科学与工程学院, 湖南 长沙 410073)
传统全球导航卫星系统信号发射时间的整毫秒恢复算法,在接收机概略位置未知时存在计算量剧增而无法应用的问题。利用北斗系统混合星座中GEO卫星电文速率高的这一特点,提出一种基于GEO粗定位的北斗接收机快速定位的方法。在接收机概略位置完全未知的情况下,使用已获取完整信号发射时刻的纯GEO星座进行粗定位,根据解算获得的概略位置对非GEO卫星发射时刻毫秒整数时间进行恢复,利用所有可见卫星进行精确定位。使用国际全球连续监测评估系统测站观测伪距对算法进行验证,国内测站可100%实现伪距恢复,完成快速定位。仿真遍历中国区域用户,在仿真伪距增加均值为0,标准差为6m噪声,截止仰角为0°时,中国附近区域实现快速定位概率均大于98.68%,其中约80%的中国附近区域可以100%实现卫星信号传输时间恢复并完成快速定位。
北斗卫星导航系统;地球静止轨道星座;信号传输时间恢复;首次定位时间
(CollegeofElectronicScienceandEngineering,NationalUniversityofDefenseTechnology,Changsha410073,China)
首次定位时间(TimeToFirstFix,TTFF)是导航接收机的重要性能指标,而影响首次定位时间的因素包括卫星星历获取时间和观测伪距获取时间。通过接收机存储广播星历、扩充式星历或者接收机端自主生成扩充式星历等方法可以缩短卫星星历的获取时间[1-4]。在传统的导航接收机定位中,接收机通过依次完成码相位测量、电文同步获取卫星信号发射时间,结合接收机时钟生成伪距实现后续定位解算。因此在星历信息已知条件下,制约首次定位时间的主要因素为卫星完整观测伪距的获取时间。
辅助GPS(A-GPS)技术可以在完成码相位测量后实现快速定位,缩短首次定位时间。文献[5]提出一种包含5个状态变量的免时定位算法,文献[6]提出了一种利用至少6颗卫星GPSC/A码相位测量进行定位的方法。但上述方法对用户概略位置均有所约束,即只有在接收机的概略位置估计误差不超过150km时,才能快速恢复出卫星毫秒整数时间,在概略位置未知的情况下搜索计算量会急剧增加[7-8]。文献[9]从信号传输时间维度给出了一种快速搜索方法,但需要高精度的接收机时钟辅助。
1 概略位置未知时的BDS接收机快速定位方法
中国北斗卫星导航系统(BeiDouNavigationSatelliteSystem,BDS),在轨工作卫星包括5颗地球静止轨道(GeosynchronousEarthOrbit,GEO)卫星、4颗中地球轨道(MediumEarthOrbit,MEO)卫星和5颗倾斜地球同步轨道(InclinedGeosynchronousSatelliteOrbit,IGSO)卫星[10]。GEO卫星采取500bps的电文速率,一帧电文持续时间仅为0.6s,而MEO/IGSO卫星采取50bps的电文速率,一帧电文持续时间为6s。因此,在信号捕获后,相比于MEO/IGSO卫星,GEO卫星能够快速地完成电文帧同步,获取完整的信号发射时间,所消耗帧同步时间约为MEO/IGSO完成帧同步时间的十分之一。同时,北斗导航系统中有5颗GEO卫星,满足传统定位解算中至少4颗卫星的需求。本文尝试提出一种在星历已知条件下基于GEO粗定位的BDS接收机快速定位方法,流程示意图如图1所示。

图1 基于GEO粗定位的快速定位方法流程图Fig.1 Flow chart of the quick location method based on coarse positioning by GEO constellation
1.1 GEO星座粗定位可行性分析
北斗系统包含5颗GEO卫星,分别位于东经58.75°,80°,110.5°,140°和160°,如表1所示。

表1 北斗GEO卫星经度分布
假设用户高程为0m,以1°为间隔遍历经纬度范围为北纬5°~55°、东经70°~140°区域中用户观测GEO星座的可见性。当观测截止仰角为0°时,用户观测GEO卫星可见数如图2所示。

图2 中国附近区域内可见GEO卫星数Fig.2 Visual satellite number of GEO in Chinese surrounding area
由图2可知在中国及周边地区,大部分区域能观测到5颗GEO卫星、部分边界区域能观测到4颗GEO卫星,满足传统定位解算中卫星数需求。
在GEO完成帧同步后可以对本地时间进行校正,保证本地时间精度优于10ms。而在本地时间较为精确的情况下,伪距修复对概略位置的约束为0.5个码周期,即误差小于150km[5-6]。理想的GEO卫星轨道为赤道面上单点,轨道倾角为0°。用户观测理想GEO星座卫星的几何构型太差,导致使用理想GEO星座定位会使定位结果发散从而严重偏离用户真实位置。而实际卫星轨道中,虽然GEO卫星轨道倾角很小,但并不为零。通过长时间收集北斗系统广播星历,图3给出了2014年3月17日至2014年3月23日北斗GEO卫星纬度变化情况。图4给出某一时刻中国附近区域用户使用可见GEO卫星进行定位的位置精度衰减因子(PositionDilutionOfPrecision,PDOP)情况。
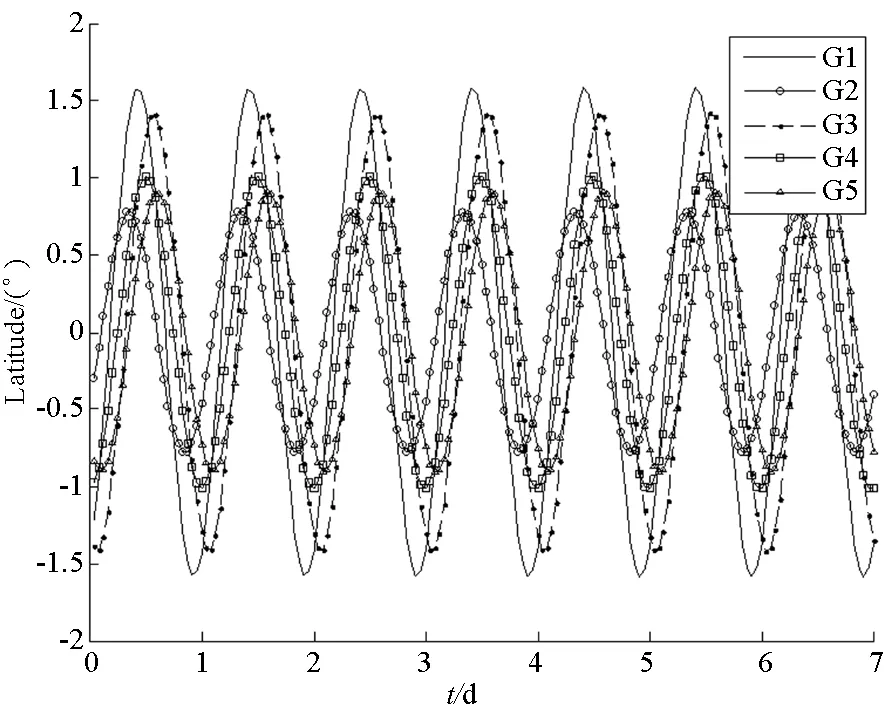
图3 北斗系统GEO卫星纬度变化Fig.3 Changes in latitude of BDS GEO satellite

图4 某一时刻中国区域GEO定位的PDOPFig.4 PDOP of GEO constellation in Chinesesurrounding area at a given time
由图4可知,在这一时刻仅使用GEO星座进行定位中国附近大部分区域PDOP值在100左右。GPS标准定位服务中单频接收机典型伪距测量误差约为6m[11],其中主要的误差项为电离层延迟修正残差。文献[12]通过长时间的数据统计比较各个系统空间信号测距误差(Signal-In-SpaceRangingErrors,SISREs)精度,指出北斗系统SISRE的均方根(RootMeanSquare,RMS)值为1.5±0.1m。文献[13]指出北斗系统公开服务空间信号用户测距误差(UserRangeError,URE)精度指标优于2.5m(95%置信度)。文献[14-15]分析了北斗系统码相位测量的多径问题,但此问题对标准单点定位服务影响不大,主要影响精密单点定位(PrecisePointPositioning,PPP)等高精密应用。文献[16]对北斗卫星导航系统电离层Klobuchar模型参数性能进行了精度评估,指出其修正精度一般在70%以上。因此,在北斗系统伪距测量误差与GPS伪距测量误差精度相当的条件下,在PDOP值为数百时,获得的概略位置精度可满足伪距修复的约束条件。
1.2 非GEO卫星发射时间恢复
在接收机中卫星i的伪距可表示为
(1)
(2)
伪距星间单差后可以得到卫星j的伪距毫秒数的计算公式为:
(3)
因此,在获取用户概略位置后,MEO/IGSO卫星的完整伪距可以通过图5流程进行恢复。
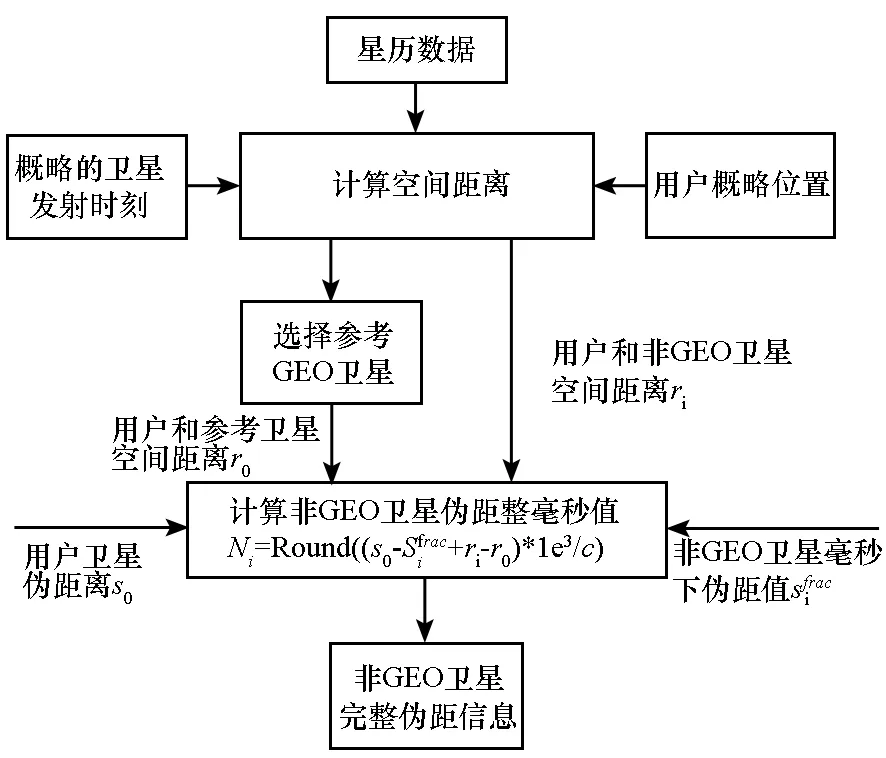
图5 非GEO卫星伪距恢复Fig.5 Pseudorange recovery of non-GEO satellites
2 仿真与分析
使用2014年3月17日至2014年3月24日北斗广播星历进行仿真试验。在各卫星生成伪距加入均值为0、标准差为6m的噪声进行仿真实验。用户坐标为北纬39°东经116°高程为0m时,使用所有几何可见GEO进行定位,结果如图6所示,其中CEP为50%可能性的圆误差。由图6可知,在用户坐标为(39°N,116°E,0m)时使用所有可见GEO卫星进行定位的定位误差最大仅为千米量级,远小于伪距毫秒恢复对概略位置精度150km的约束。

(a)水平误差(a) Horizontal error

(b)高程误差(b) Altitude error图6 北斗GEO星座粗定位结果Fig.6 Coarse positioning results using GEO constellation
国际全球连续监测评估系统(internationalGNSSMonitoringandAssessmentSystem,iGMAS)通过利用多系统全球导航卫星系统(GlobalNavigationsatelliteSystem,GNSS)高精度接收机和高增益全向天线,建立一个全球分布的GNSS信号跟踪网络,监测GNSS系统的服务性能和信号质量[17]。使用iGMAS部分测站B1观测数据验证本文算法有效性,结果如表2所示。共使用了7天的测站观测数据,观测数据频度为30s。
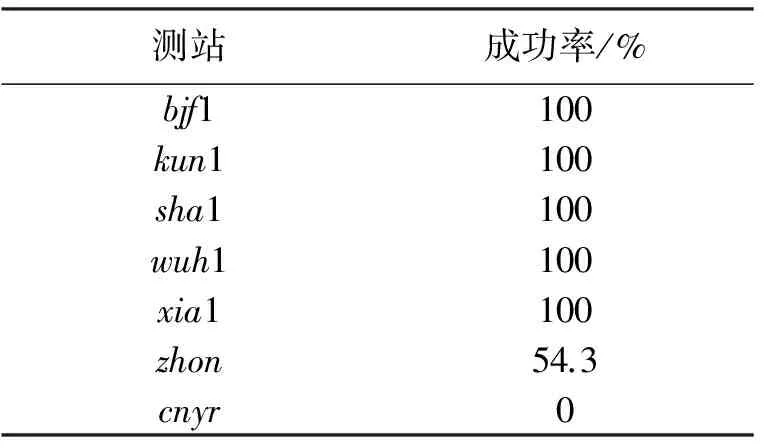
表2 iGMAS测站算法成功率
由表2统计结果可知:国内测站定位成功率均为100%;zhon测站成功率仅为54.3%是由于测站概略坐标为(69.4°S,76.4°E),位于南极附近,出现长时间观测GEO卫星数少于4颗,无法完成GEO星座粗定位;cnyr测站概略坐标为(78.9°N,11.9°E),位于北极附近,无法观测到GEO卫星,从而导致本文算法成功率为0。
以1°为间隔遍历中国附近区域用户,在伪距加入均值为0、标准差为6m噪声的情况下进行7天时长的仿真,分别以截止仰角0°和5°进行仿真,统计中国附近区域基于GEO粗定位的BDS接收机快速定位方法成功率,如图7所示。
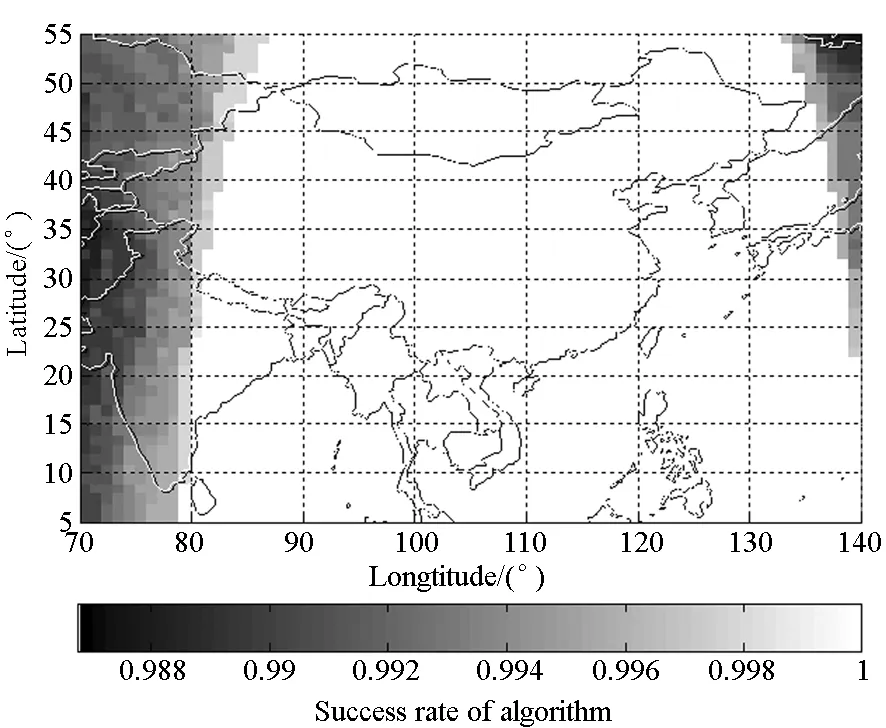
(a)截止角0°时成功率(a) Success rate with 0° cut-off elevation

(b)截止角5°时成功率(b) Success rate with 5° cut-off elevation

(c)图(b)的局部放大(c) Partial enlarged picture of figure (b)图7 中国区域分布快速算法成功率Fig.7 Success rate of quick location method in Chinese area
当截止仰角取0°时,中国附近区域使用快速定位方法恢复卫星发射时刻成功率均大于98.19%;79.07%的区域进行快速定位成功率可以达到100%;对比0°截止角时中国附近区域可见GEO卫星数可知,未达到100%成功率的用户坐标与卫星可见数为4颗区域基本重叠。可见GEO卫星数为4颗时,粗定位误差可能出现超出伪距恢复约束的情况,从而导致快速定位失败。当截止仰角取5°时,中国附近区域算法成功率出现为0的情况,原因为可见GEO卫星数少于4颗,不满足粗定位最小二乘解可见卫星数要求;相比于截止角为0°,仅有61.75%的区域可实现100%成功率。
3 结论
本文提出了基于GEO卫星粗定位的北斗接收机快速定位方法,该方法在星历已知情况下,根据北斗混合星座中GEO卫星电文速率快的特点,无须等待所有卫星完成帧同步,从而提高首次定位时间。使用iGMAS测站实际观测的B1数据对快速定位算法进行了验证,结果表明,在观测到4颗及其以上GEO卫星时,可以实现快速定位。使用广播星历搭建仿真场景,在生成伪距上增加均值为0,标准差为6m的噪声。当截止仰角为0°时,中国附近区域实现快速定位概率均大于98.68%,其中约80%的区域可以100%实现快速定位。同时,对比分析了截止仰角为5°时的情况。结果表明,在实际使用本算法时,粗定位阶段应该减小截止仰角门限,尽可能地使用多的GEO卫星进行粗定位。在非GEO卫星伪距恢复后进行混合星座精确定位时,可参照传统定位方法设置合理截止仰角门限。
References)
[1]LundgrenD,VanDiggelenF.Assistancewhenthere′snoassistance[J].GPSWorld, 2005, 16(10): 32-36.
[2]MattosP.Self-assistedGPS[J].GPSWorld, 2008, 19(9): 50-56.
[3]AhnJ,SongHY,SungS,etal.AnefficientGPSparameterpredictionmethodusingGPSephemerispatternsforself-assistedGPS[C]//ProceedingsofInternationalConferenceonControl,AutomationandSystems, 2010: 2431-2434.
[4]KaplanED,HegartyCJ.UnderstandingGPS:principlesandapplications[M]. 2nded.USA:ArtechHouse, 2006.
[5]VanDiggelenF.Methodandapparatusfortime-freeprocessingofGPSsignals[P].USPatent6417801, 2002.
[6]SirolaN,SyrjärinneJ.GPSpositioncanbecomputedwithoutthenavigationdata[C]//Proceedingsofthe15thInternationalTechnicalMeetingoftheSatelliteDivisionoftheInstituteofNavigation, 2002: 1613-1619.
[7]SirolaN.Exhaustiveglobalgridsearchincomputingreceiverpositionfrommodularsatelliterangemeasurements[J].JournalofPhysics:ConferenceSeries, 2006, 52(1): 73-82.
[8] 曹卉, 袁洪. 辅助式GPS接收机信号发射时间恢复算法研究[J]. 空间科学学报, 2012, 32(4): 585-591.
CAOHui,YUANHong.Methodfortime-of-transmissionrecoverybasedonassisted-GPSpositioning[J].ChineseJournalofSpaceScience, 2012, 32(4): 585-591.(inChinese)
[9]WuP,JingSR,LiuWX,etal.AquicklocationmethodforhighdynamicGNSSreceiverbasedontimeassistance[J].InternationalJournalofComputersCommunications&Control, 2013, 8(5): 768-773.
[10] 北斗卫星导航系统空间接口控制文件公开服务信号(2.0版) [EB/OL]. [2013-12].http://www.beidou.gov.cn.
BeiDouNavigationSatelliteSystemSignalinSpaceInterfaceControlDocumentOpenServiceSignal(Version2.0) [EB/OL]. [2013-12].http://www.beidou.gov.cn.(inChinese)
[11]MisraP,EngeP.Globalpositioningsystem,signal,measurements,andperformance[M].2nded.USA:Ganga-JamunaPress, 2006.
[12]MontenbruckO,SteigenbergerP,HauschildA.Broadcastversuspreciseephemerides:amulti-GNSSperspective[J].GPSSolutions, 2015, 19(2):321-333.
[13] 北斗卫星导航系统公开服务性能规范(1.0版) [EB/OL]. [2013-12].http://www.beidou.gov.cn.
BeiDouNavigationSatelliteSystemOpenServicePerformanceStandard(Version1.0) [EB/OL]. [2013-12].http://www.beidou.gov.cn.(inChinese)
[14]WanninerL,BeerS.BeiDousatellite-inducedcodepseudorangevariations:diagnosisandtherapy[J/OL].GPSSolution. 12November2014. [2015-01-10].http://link.springer.com/article/10.1007/s10291-014-0423-3.
[15]WangGX,DeJongK,ZhaoQL,etal.MultipathanalysisofcodemeasurementsforBeiDougeostationarysatellites[J].GPSSolution, 2015, 19(1): 129-139.
[16] 张强, 赵齐乐, 章红平, 等. 北斗卫星导航系统Klobuchar模型精度评估[J]. 武汉大学学报(信息科学版), 2014, 39(2): 142-146.
ZHANGQiang,ZHAOQile,ZHANGHongping,etal.EvaluationontheprecisionofKlobucharmodelforBeiDounavigationsatellitesystem[J].GeomaticsandInformationScienceofWuhanUniversity, 2014, 39(2): 142-146.(inChinese)
[17] 焦文海, 丁群, 李建文,等.GNSS开放服务的检测评估[J]. 中国科学:物理学 力学 天文学, 2011, 41(5): 521-527.
JIAOWenhai,DINGQun,LIJianwen,etal.MonitoringandassessmentofGNSSopenservices[J].SCIENCECHINAPhysics,Mechanics&Astronomy, 2011, 41(5): 521-527.(inChinese)
A quick location method for BDS receiver based on coarse positioning by GEO constellation
JING Shourang, LI Baiyu, LIU Wenxiang, SUN Guangfu
Withoutknowingtheapproximatepositionofthereceiver,themillisecondrecoveryalgorithmoftraditionalglobalnavigationsatellitesystemsignal-radiationexistedproblemofincreasingcomputation,butunabletobeapplied.AfastpositioningmethodforBDSreceiverwasproposedaccordingtothehighnavigationdatarateofGEO(GeosynchronousEarthOrbit)satellitesinBeiDouNavigationSatelliteSystem.Firstly,anapproximatepositionwasgotbycoarsepositioningusingGEOconstellation.ThenthesignaltransmissiontimerecoveryofMEO/IGSOsatellitewasmadeaccordingtotheapproximateposition.Finally,allthevisiblesatelliteswereusedforprecisepositioning.UsingiGMASstationsobservationpseudorangetoverifytheproposedalgorithm.ThestationsinChinacan100%gotfull-pseudorangeandobtainedfastpositioning.ByusingBDSbroadcastephemerisdata,asimulationenvironmentwasbuilt.Thewhitenoisewith6metersstandarddeviationisaddedtosatellitespseudorang.Andthecut-offangleofelevationis0°.Thesuccessrateofthequicklocationmethodisbiggerthan98.68%.Andabout80%ofChinesesurroundingareacan100%guaranteeacompletesatellitesignalemissiontimerestorationandobtainanaccurateposition.
BeiDounavigationsatellitesystem;geosynchronousearthorbitconstellation;signaltransmissiontimerecovery;timetofirstfix
2014-09-17
教育部新世纪人才支持计划资助项目(NCET-08-0144)
靖守让(1987—),男,江苏徐州人,博士研究生,E-mail:hanchongjsr@163.com;孙广富(通信作者),男,研究员,博士,博士生导师,E-mail:sunguangfu_nnc@163.com
10.11887/j.cn.201504013
http://journal.nudt.edu.cn
TN
A
