控制分配在平流层飞艇姿态控制中的应用*
2015-11-05侯中喜杨希祥
王 鹏,侯中喜,杨希祥
控制分配在平流层飞艇姿态控制中的应用*
王 鹏,侯中喜,杨希祥
(国防科技大学 航天科学与工程学院, 湖南 长沙 410073)
针对平流层飞艇一般采用多控制机构的特点,将广义逆控制分配方法应用到飞艇姿态控制系统中,并根据飞艇控制机构特性采用了加权伪逆控制分配算法。飞艇姿态控制仿真结果表明:设计的控制分配方法可以有效实现多控制机构的协调操纵,对姿态角控制效果良好,避免了单一操纵舵面过早进入饱和状态的情况;合理调整控制分配权值可减少能量损耗,增强实时性,便于工程实现。
平流层飞艇;控制分配;姿态控制;广义逆
(College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China)
平流层飞艇主要依靠浮力提供升力,能够长期停留空中的优势使其成为临近空间承载平台的最佳选择之一,其具有广阔的军事和民用应用前景,已成为近期各国研究的重点。由于平流层飞艇体积庞大,一般使用多种控制机构进行飞行控制,例如对飞艇的姿态控制方法就包括对重心的调整、浮心的调整、左右发动机推力配平以及气动舵面的调整等。多种控制机构需要同时协调作用,对飞行控制系统的设计带来巨大的挑战。
由于现代多操纵面飞行控制系统设计的需要,自20世纪90年代开始多操纵面控制分配技术得到了广泛的研究,并在某些实际控制系统当中已经得到了实际应用[1-2]。Doman等利用线性规划方法研究了具有气动冗余的飞行器控制分配问题[3];Bolender等研究了基于线性规划方法的可重复使用飞行器的控制分配问题[4];韩放等研究了采用线性规划的控制分配方法设计基于综合能量优化的超高空观测平台的姿态控制策略[5]。
基于广义逆原理的控制分配方法具有良好的动态性能和较强的鲁棒性,同时能有效地降低控制量的最大值,降低对执行机构的要求,计算简单,工程实现容易[6]。
1 飞艇非线性动力学模型
为了便于简化分析,在建模时作如下假设:
1)飞艇为刚体,忽略其弹性效应;
2)飞艇具有纵向对称平面,并且重心在对称平面内;
3)飞艇的体心和浮心重合。
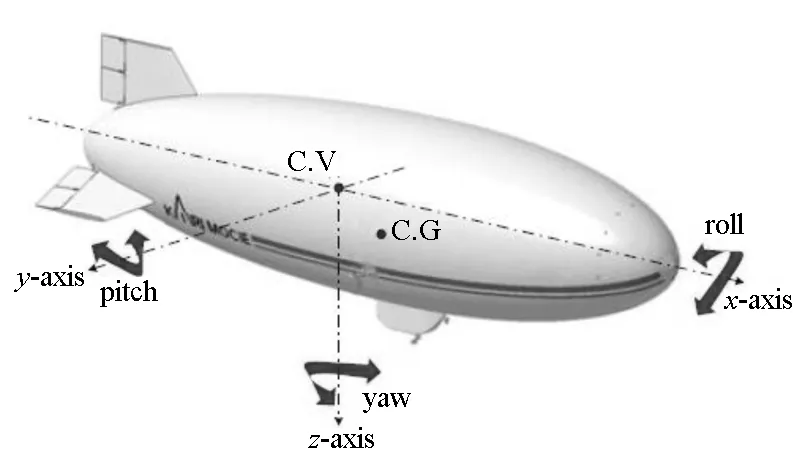
图1 飞艇布局示意图Fig.1 Layout of the airship
飞艇布局类似于韩国VIA飞艇,如图1所示。艇体坐标系原点取在飞艇体心,坐标与飞艇固连。x轴与艇体的设计轴线平行,且处于艇身对称平面内;y轴垂直于艇身对称平面指向右方;z轴在艇身对称平面内,且垂直于x轴指向下方。驻空期间,体心与浮心重合,重心在体心之下,沿艇体各轴的速度分量为u、v、w,绕艇体各轴角速率分量为p、q、r。
作用在飞艇上的力主要包括:流体惯性力、空气动力、螺旋桨发动机推力、重力和浮力。则艇体坐标系上质心运动的动力学方程为:
(1)
绕艇体坐标系各轴转动的动力学方程为:
(2)
式(1)和式( 2)右端是作用在飞艇上的力和力矩在艇体坐标系各轴上的分量之和。其中xG,yG,zG为重心坐标;m为飞艇质量。根据前文假设有:yG=0,惯性矩Ixy=Iyz=0。
2 控制分配方法
所研究的飞艇基本布局如图1所示,其螺旋桨发动机的配置包括:尾部螺旋桨发动机以及艇腹两侧的推力矢量螺旋桨发动机,尾翼为“十”字型布局,尾翼上装有两个升降舵和两个方向舵。
2.1 控制分配方法原理
飞艇的动力学方程可写成如下形式:

(3)

(4)
有解,说明飞艇具有足够的控制能力。
式(4)还说明控制机构产生的力矩是用于修正需要的角加速度和飞艇的原始角加速度之间的差。由于控制机构的数目(4种)大于控制参数(3个角速度),所以必须使用控制分配方法以获取一个确定解。
假设飞艇的期望控制转矩是v(t)∈Rk,操纵机构偏转量为δ(t)∈Rm,这里m>k。
给定v(t),δ(t)使
f(δ(t))=v(t)
(5)
式中,f:Rm→Rk是非线性映射函数。将f线性化,则式(5)变为:
Bδ(t)=v(t)
(6)
式中,B∈Rk×m是控制效率矩阵。
考虑作动器位置限制和作动器速率限制,则有:
(7)
由于数字控制系统存在合理的近似时间微分:

(8)
式中,T为采样时间。

(9)
则带约束的非线性控制分配问题描述转化为如式(10)的标准形式:

(10)
即在期望控制转矩v(t)要求下,需要控制分配器求解得到操纵机构偏转指令量δ(t),并满足约束条件。以上问题的解有以下3种情况:①有多组解,需根据某些性能指标进行优化,寻求最优解;②只有1组解;③无解 :需在约束条件下尽可能使f(δ)逼近v。
目前国内外关于控制分配方法的研究成果具体可归纳为两大类:基于优化的分配法和非优化的分配法。基于优化的方法主要包括广义逆法和基于线性规划的直接几何方法以及基于二次规划的动态分配法;非优化控制分配方法主要包括直接几何法和串接链(daisy chain)控制分配法[6-7]。
2.2 基于加权伪逆法的控制分配算法
考虑到工程实现的可行性并采用相对简单的求解策略,因此使用广义逆法[8-9]进行优化问题的求解。广义逆法主要包括伪逆法、最优广义逆法等。它的基本思想是在控制无约束的情况下,对期望运动的广义逆求解并对解进行优化。
通常优化问题可采用最小范数法解决,伪逆法就是取控制量的最小2范数(能量函数)为优化指标求解的。伪逆法在所有飞行条件下,各个控制量都参与进行协调控制,可以避免单一操纵面进行操纵时舵量过早进入饱和的问题。
设代价函数为J=uTu,约束条件为Bu=v,定义标量函数:
H(u,λ)=0.5uTu+λT(Bu-v)
(11)
根据求极值的条件,可得出其右逆解:
u=B*v=BT(BBT)-1v
(12)
伪逆符号的表示为:A*=AT(AAT)-1。
但传统伪逆法求解中,没有考虑各操纵面使用效率的不同以及各舵面速率和位置饱和的限制,为此引入加权后的操纵机构控制分配优化指标:
(13)
式中,W为对称正定权值矩阵。对J求u和λ的偏微分。结合上述伪逆法求解可推导出:
u=W-1(BW-1)*v
(14)
从而得到加权伪逆法,其主要目的是在进行控制分配求解时按照使用侧重点的不同对各控制执行机构进行加权处理。选择的权值矩阵为对角正定矩阵,矩阵元素与操纵面控制效率有关。如果适当减小控制效率低但位置饱和限制小的操纵面的对应权值,则可以增加其控制分配权限,从而避免操纵效率高的操纵面控制量过大的问题。
3 仿真结果及分析
以文献[10]提供的平流层飞艇数据为例。为实现俯仰机动,可以使用尾部螺旋桨发动机以及艇腹两侧的推力矢量螺旋桨发动机、尾翼上的气动舵面三种操纵面进行协调控制。气动舵面的控制效率与动压密切相关,当动压Q<10Pa时,气动舵面效率很低,一般不用气动舵面进行姿态控制;当机上传感器测量到动压Q≥10Pa时,气动舵面参与控制分配。
选取仿真条件如下: 平流层飞艇在20km高处定点悬停,大气密度为0.088 909 9kg/m3,纵向平面内的有水平常值风风速为-20m/s,分别采用推力矢量发动机单独控制、常规伪逆控制分配方法和加权伪逆控制分配方法这三种控制方式,以10°俯仰角为控制目标进行数字仿真。
在仿真时为减小控制过程中的能量损耗,适当增大气动舵面偏转量,减小尾部发动机和推力矢量发动机的控制量。加权伪逆控制分配权值矩阵依据各操纵面在俯仰转动方向上的控制效率比值和期望的偏转量,根据权值大控制量较小的原则取为:依次对应尾部发动机油门控制量、推力矢量发动机偏转角度和升降舵的控制量。

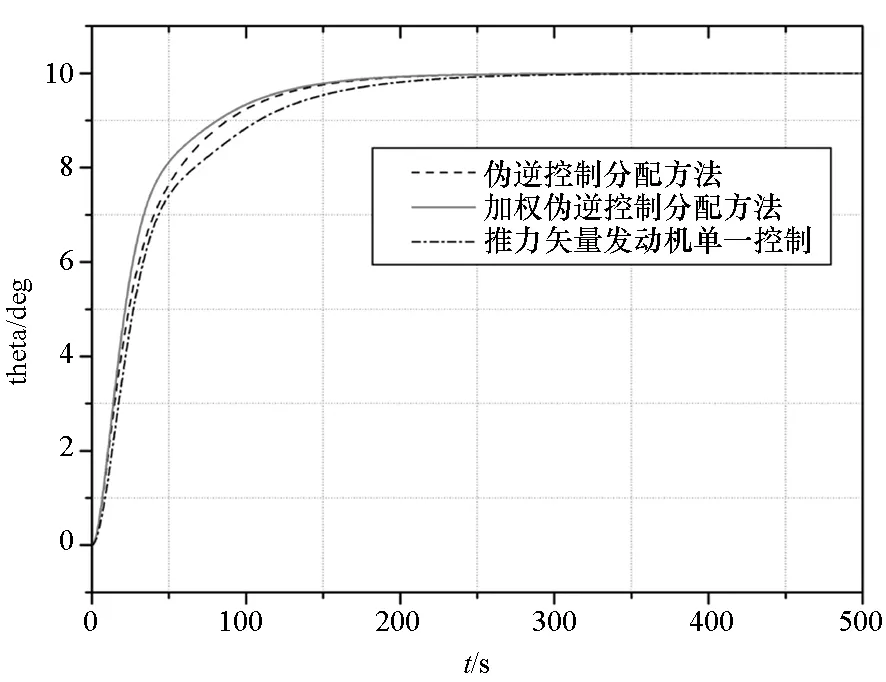
图2 不同控制分配方法俯仰角控制结果对比Fig.2 Pitch angle control results for different control allocation approaches
图2给出了三种控制方式的俯仰角控制响应结果,产生的控制力矩都能跟踪指令值,实现10°俯仰角的控制目标;加权伪逆控制分配方法响应最快,单一推力矢量发动机进行控制时响应较慢。

图3 不同控制分配方法推力矢量螺旋桨发动机偏转角度对比Fig.3 Thrust-vector propeller deflection angle for different control allocation approaches

图4 不同控制分配方法尾部发动机油门控制量对比Fig.4 Tail engine throttle control results for different control allocation approaches
图3和图4给出了控制过程中推力矢量发动机偏转角度和尾部发动机油门控制量对比。推力矢量发动机单一控制时偏转量最大,采用加权伪逆控制分配方法时偏转量最小;而采用加权伪逆控制分配方法时油门的调整量也较小,可见采用加权伪逆控制分配可以有效减小能量损耗。

图5 不同控制分配方法升降舵偏转角度对比Fig.5 Elevator deflections for different control allocation approaches
图5给出了两种控制分配方法尾翼升降舵偏转过程对比,使用常规伪逆控制分配方法时升降舵最大偏角为16.2°,使用加权伪逆控制分配方法时升降舵最大偏角为20°,与适当增大气动舵面偏转量的期望一致。根据实时动压数据,调整控制分配算法中升降舵的权重值可以有效调整升降舵的控制量,减小其他在操纵时能量损耗较大的控制机构的控制量,从而减小整体的能量损耗。当动压足够大时可以只用气动舵面进行操纵。
通过分析仿真结果可知:所使用的控制分配方法可以有效协调控制飞艇的多种操纵机构,对飞艇姿态角具有良好的稳定控制效果,动态性能满足要求;同时采用加权伪逆法后,可以根据各操纵面的实际控制效率和能耗情况调整控制分配的权值,降低系统的能耗。
4 结论
将改进后的广义逆控制分配方法应用于飞艇姿态控制器中可有效协调控制平流层飞艇的多种操纵机构,提高飞艇控制能力,其姿态控制效果良好,可以避免单一操纵面控制量过大的问题;通过合理调整控制分配权值可以降低系统的能耗。这一控制分配方法实现简单,实时性较好,便于工程实现。缺点是对控制机构偏转速率等不同约束的处理还不是很理想。
References)
[1] Bodson M. Evaluation of optimization methods for control allocation[J]. Journal of Guidance, Control, and Dynamics, 2002, 25(4):700-711.
[2] Page A, Steinberg M. A closed-loop comparison of control allocation methods[C]//Proceedings of the AIAA Guidance, Navigation, and Control Conference, AIAA A00-37180, 2000.[3] Doman D B, Gamble B J, Ngo A D. Control allocation of reaction control jets and aerodynamics surfaces for entry vehicles[C]//Proceedings of AIAA Guidance, Navigation and Control Conference and Exhibi, AIAA-2007-6778, 2007.[4] Bolender M A, Doman D B, Opeenherimer M W. Application of piecewise linear control allocation to reusable launch vehicle guidance and control[C]// Proceedings of the 14th Mediterranean Conference on Control and Automation, 2006:1-10.[5] Di X G, Han F, Yao Y. Attitude control allocation strategy of high altitude airship based on synthetic performance optimization [J]. Journal of Harbin Institute of Technology (New Series), 2009, 16(6):746-750.
[6] Doman D B,Ngo A D. Dynamic inversion-based adaptive/reconfigurable control of the X-33 on ascent [J]. Journal of Guidance, Control, and Dynamics, 2002, 25(2): 275-284.[7] 杨恩泉,高金源,李卫琪.多目标非线性控制分配方法研究[J].航空学报, 2008, 29(4):995-1001.
YANG Enquan,GAO Jinyuan,LI Weiqi.Research on multi-object nonlinear control allocation method[J].Acta Aeronautica et Astronautica Sinica, 2008, 29(4):995-1001. (in Chinese)
[8] Enns D. Control allocation approaches [C]//Proceedings of the 1998 AIAA Guidance, Navigation, and Control Conference, AIAA-1998-4109, 1998.[9] Burken J J, Ping L. Two reconfigurable flight control design methods: robust servomechanism and control allocation [J]. Journal of Guidance, Control, and Dynamics, 2001, 24(3):482-493.
[10] Joseph B M, Michael A P, Zhao Y Y. Development of an aerodynamic model and control law design for a high altitude airship [C]//Proceedings of AIAA the 3rd “Unmanned Unlimited” Technical Conference Workshop and Exhibit, Chicago, 2004:1-17.
Control allocation approach for stratospheric airship attitude control
WANG Peng, HOU Zhongxi, YANG Xixiang
The stratospheric airships generally act with the redundant control effectors, thus a control allocation approach based on generalized inverse was applied to the airship attitude control system and the weighted pseudo-inverse control allocation method was adopted on the basis of characteristics of airship control effectors. The simulation results of a stratospheric airship attitude control show that: the designed control allocation approach can realize the coordinated operation of redundant control effectors effectively and its control effect on attitude angle is good, which avoids the premature saturation of control surface when using single effector; the reasonable adjustment of control allocation weights can reduce energy consumption, enhance instantaneity and provide convenience in engineering.
stratospheric airship; control allocation; attitude control; generalized inverse
2015-04-08
国家863 计划资助项目(2014AA7052002)
王鹏(1980—),男, 湖南湘潭人,副教授,博士,E-mail:wangp_xt@163.com
10.11887/j.cn.201504003
http://journal.nudt.edu.cn
V249
A
1001-2486(2015)04-015-04
