混凝土泵车臂架系统振动分析与实验
2015-10-29刘荣升高英杰杨育林
刘荣升 李 慧 高英杰 杨育林
燕山大学,秦皇岛,066004
混凝土泵车臂架系统振动分析与实验
刘荣升李慧高英杰杨育林
燕山大学,秦皇岛,066004
应用解析法对52 m长混凝土泵车的五节臂系统进行振动特性分析。采用拉格朗日第二类方程和假设模态法建立了臂架系统的柔性多体动力学方程,基于建立的柔性模型对臂架系统进行了模态分析,并应用MATLAB软件对模态进行了数值求解,得出了臂架系统的前10阶固有频率及振型,并分析了不同的臂架参数对臂架系统固有频率的影响,最后通过现场测试实验对理论固有频率进行了验证。研究结果为臂架结构的进一步优化及系统振动的控制提供了理论依据。
混凝土泵车臂架系统;柔性多体动力学;模态分析;固有频率
0 引言
混凝土泵车是一种用于混凝土输送和浇筑的大型建筑机械,广泛应用于高层建筑、桥梁、高速铁路以及地下工程的混凝土浇筑施工。由于泵车需要实现大范围的浇筑作业,故其具有较长的臂架系统,当前最长的臂架已达到101 m[1]。臂架系统多由四到六节臂构成,是一种典型的柔性多体动力学系统。在混凝土泵送过程中,周期性的泵送冲击会使臂架系统产生较大幅度的振动,导致臂架末端的位置难以精确控制,引发多种安全事故。而且过大的振动会加速臂架的疲劳损伤,缩短臂架系统甚至整车的使用寿命。因此,展开针对臂架系统振动的相关研究具有重要意义。
张大庆等[2]对不同泵送流量下的泵车臂架系统的振动性能进行了实验研究,并给出了各工况下的理想流量;Cazzulani等[3-4]分别研究了泵送、臂架两个子系统对振动的影响,并研制出了缩小的实验样机;吕彭民等[5-7]从多方面对臂架结构的振动机理进行研究,找到了引起臂架振动的主要因素,并在结构优化、泵送控制方面给出了减小臂架振动的建议;刘杰等[8]分析了臂架的柔性变形对臂架末端位置控制的影响,并利用动力学软件进行了末端轨迹的仿真研究;吴智勇等[9]应用振动预测理论及时滞补偿方法,对臂架系统的振动进行了主动控制研究;朱祥华等[10]建立了臂架水平全伸位置的有限元模型,并对其进行了模态分析,得出了臂架的固有频率范围及振型云纹图。现有针对臂架系统振动特性的研究成果多是基于动力学软件通过仿真得出的,基于解析法的相关研究则鲜见报道。
本文以某型号52 m长混凝土泵车的臂架系统为研究对象,根据柔性多体动力学理论建立其动力学方程,应用解析法对臂架系统进行模态求解,得到各阶固有频率及相应振型,通过实验对一阶固有频率进行了验证。同时进一步分析了臂架的其他参数对臂架固有频率的影响,得出臂架系统固有频率的敏感参数。
1 臂架柔性多体动力学方程的建立
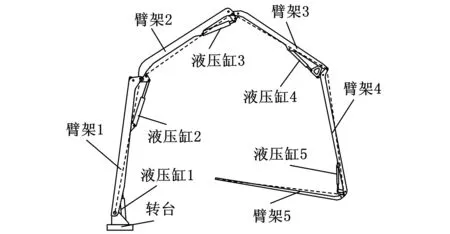
图1 臂架结构示意图
本文采用假设模态法将连续的臂架系统离散化[11],并结合拉格朗日第二类方程,建立臂架系统的柔性多体动力学模型。臂架系统的结构如图1所示,它由转台、五节臂架及相应的驱动液压缸组成,其中每节臂架的长度用li(i=1,2,…,5)表示,五节臂架的总长为L。
由于每节臂架的长度都远大于截面尺寸,因此,将各节臂架作为Euler-Bernoulli梁来考虑,只考虑其横向弯曲变形,忽略其剪切变形及轴向变形。以臂架1与转台的铰接点为原点,水平方向直线为横轴建立惯性坐标系OXY。以臂架i与臂架i-1的铰接点为原点,臂架i的起点与终点的连线为横轴建立动坐标系OiXiYi。这样建立坐标系的方式可以避免前一节臂架的弹性运动对后一节臂架的弹性运动产生影响,消除了臂架间的弹性耦合项[8],降低了建模的复杂程度。以此方法建立臂架i的坐标系如图2所示。

图2 臂架i坐标系示意图
由图2可知,臂架i上任一点P在惯性坐标系OXY中的位置矢量可表示为
(1)
其中,rk为臂架k的末端点在动坐标系OkXkYk中的位置向量,且rk=(lk,0)T;pi为点P在动坐标系OiXiYi中的位置向量,且pi=ui+vi;ui为臂架变形前点P在动坐标系中的位置矢量,即ui=(xi,0)T;vi为臂架在P点处的横向弯曲变形,即vi=(0,vi)T,所以可得pi=(xi,vi)T;Ri为动坐标系OiXiYi到惯性坐标系OXY的姿态变换矩阵,由图2所示的坐标系可以得到:
(2)
式中,θi为动坐标系Xi轴与水平方向(即惯性坐标系的X轴)之间的夹角。
将式(1)两端对时间求导,可以得到点P在惯性坐标系下的速度矢量为
(3)
i=1,2,…,5
假设各节臂架均为均质杆,则臂架i的单位长度质量ρi=mi/li,其中,mi为臂架i的质量。所以,臂架i的动能为
(4)
下面求臂架系统具有的势能,势能主要包括重力势能和因变形所储存的应变能两个部分,即
(5)
式中,E为材料的弹性模量;Ii为臂架i的截面惯性矩。
式(5)中等号右侧的第二项表示由臂架变形而引起的重力势能的变化,由于臂架的弹性变形相对较小,所以重力势能的变化可以忽略不计。臂架i的横向弯曲变形vi为时间t和位置x的函数,根据假设模态法,vi可以用里兹基函数的线性组合得到:
(6)
其中,ψij为臂架i的第j阶基函数;qij为ψij对应的广义坐标;ni为所取的里兹基函数的阶数,一般取前几阶基函数即可得到较为满意的结果,在本文中均取前两阶基函数来表示各节臂架的横向弯曲变形,即ni=2,则其前两阶基函数表示为
(7)

(8)
式中,M、C、K分别为臂架系统的惯性矩阵、阻尼矩阵和刚度矩阵。
2 理论模态分析
2.1臂架系统模态分析
由于臂架系统是一个低阻尼的系统,故在本文中忽略阻尼的影响,即C=0,所以由式(8)可以得到臂架系统的无阻尼自由振动方程:

(9)
令式(9)的解以简谐振动的形式表示,可以得到:
q=φsinωt
(10)
式中,φ、ω分别为臂架系统的特征向量和固有频率。
将式(10)代入齐次方程(式(9))中可以得到:
(K-ω2M)φ=0
(11)
如果要使得上述方程中φ具有非零解,则必须满足下述条件:
|K-ω2M|=0
(12)
由上述方程可知,求解臂架系统固有频率的问题变成了求解特征方程(式(12))特征值的问题。将式(12)的等号左侧展开即得到一个关于ω2的n阶特征多项式,即
an(ω2)n+an-1(ω2)n-1+…+a1ω2+a0=0
(13)

将任一固有频率ωj代入式(12)中,即可求解得到相应的特征向量φj,φj又表示臂架系统的第j阶模态振型,它主要描绘了振动系统中离散质量在该固有频率下的振动情况。
2.2计算仿真结果
各节臂架的端面均呈箱形结构,由弹性模量为210GPa的钢板焊接而成,它们的结构参数如表1所示。该型号泵车理论泵送频率为每分钟13~22次,即0.2167~0.3667Hz。臂架系统处于水平姿态下的混凝土浇筑工况是较危险的作业工况,受振动的影响较严重,因此在此工况下对臂架系统的振动进行分析。应用MATLAB编写计算仿真程序,通过计算得到了臂架系统的5个零频率和10个非零频率,以及各阶频率所对应的主振型。表2给出了各阶非零固有频率的仿真计算结果,同时还指出了在各阶振动中起主要作用的臂架。
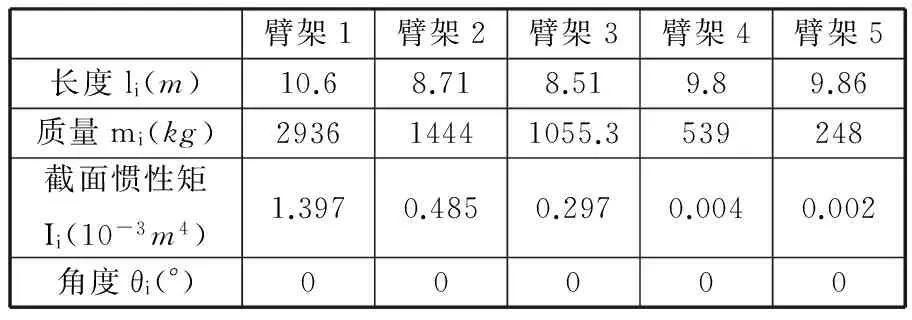
表1 臂架系统结构参数
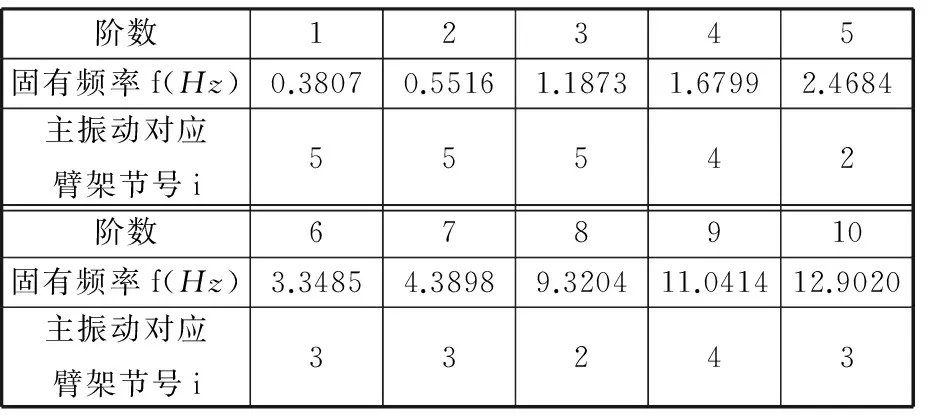
表2 各阶非零固有频率及主振动对应臂架节号
通过仿真得到了臂架系统的一阶固有频率下的振型曲线,如图3所示。其中图3a为整个臂架系统的一阶振型曲线,图3b~图3f分别为臂架1~5的一阶振型曲线。
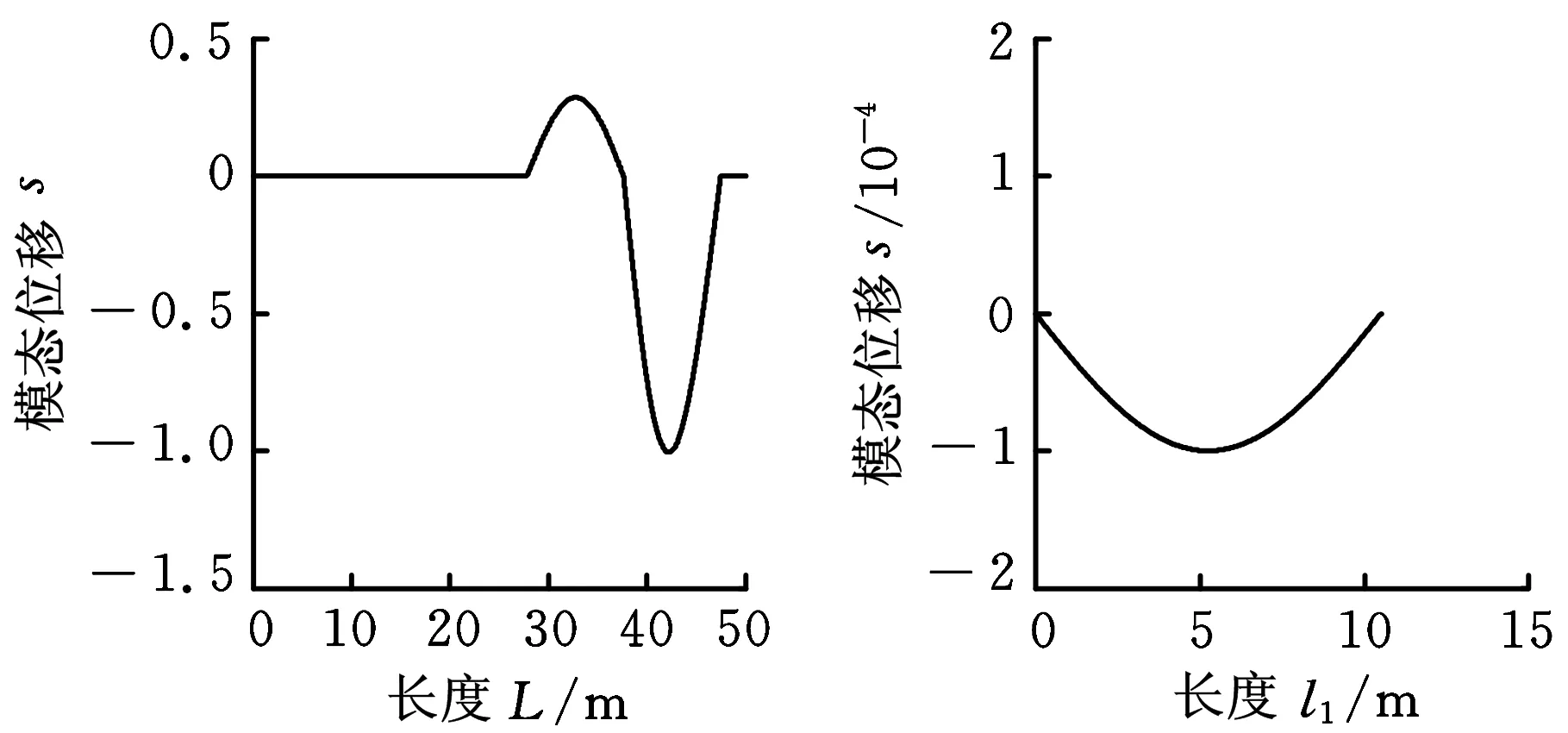
(a)臂架系统振型曲线(b)臂架1振型曲线

(c)臂架2振型曲线(d)臂架3振型曲线
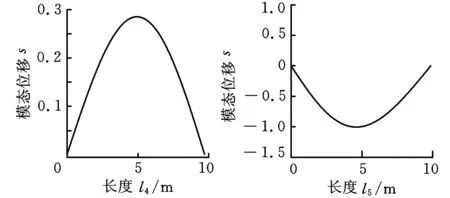
(e)臂架4振型曲线(f)臂架5振型曲线图3 一阶振型曲线
通过臂架系统自由振动的模态分析结果可以得出以下结论:
(1)相对于臂架4和臂架5,前三节臂架的振动非常微弱,因此臂架系统的振动主要体现于后两节臂架。
(2)五节臂架系统的五个零频率对应的振动模态即为刚体模态。刚体模态包含于特征解的完整解中,是一种重要的特殊模态,很多情况下这种刚体运动是位移场的重要参与者。
(3)臂架系统具有十个不重复的非零固有频率,为臂架系统的前十阶固有频率。其中一阶固有频率为0.3807Hz,与混凝土的泵送频率十分接近,这正是臂架系统产生大幅振动的主要原因。
(4)前三阶固有频率对应的主振动是臂架5的弯曲振动;第4、9阶固有频率对应的主振动是臂架4的弯曲振动;第5、8阶固有频率对应的主振动是臂架2的弯曲振动;第6、7、10阶固有频率对应的主振动是臂架3的弯曲振动。
2.3参数对臂架系统固有频率的影响
本文进一步分析了臂架4和臂架5的参数对系统固有频率的影响。通过分析,分别得到了臂架系统的固有频率与臂架的长度、刚度以及关节角位置之间的关系,如图4所示。由于臂架的振动主要是由低阶模态引起的,所以图4只给出一阶和二阶固有频率随参数改变的变化曲线。根据图4所示的变化趋势,可得出以下结论:
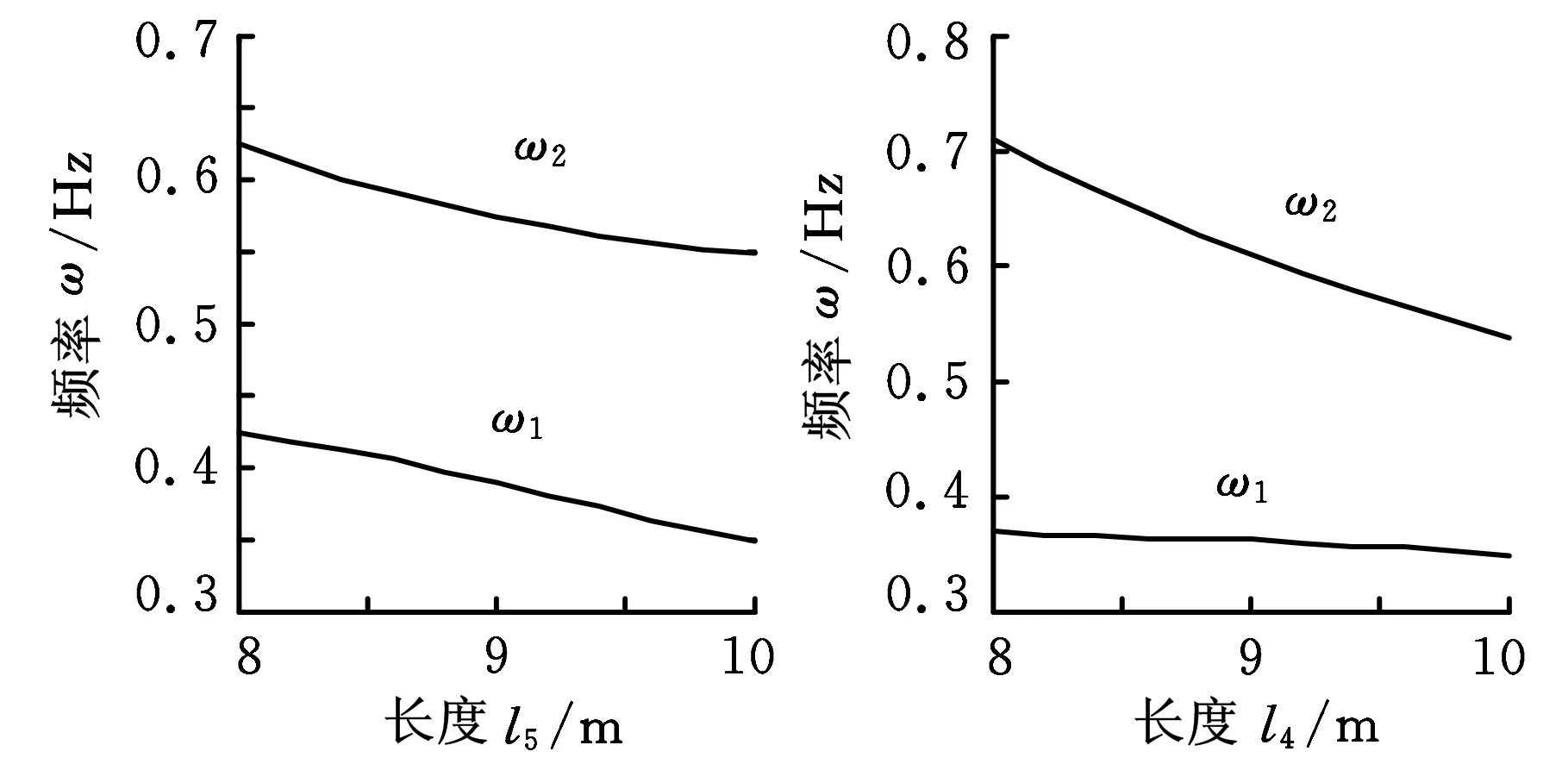
(a)臂架5长度的影响(b)臂架4长度的影响

(c)臂架5刚度的影响(d)臂架4刚度的影响
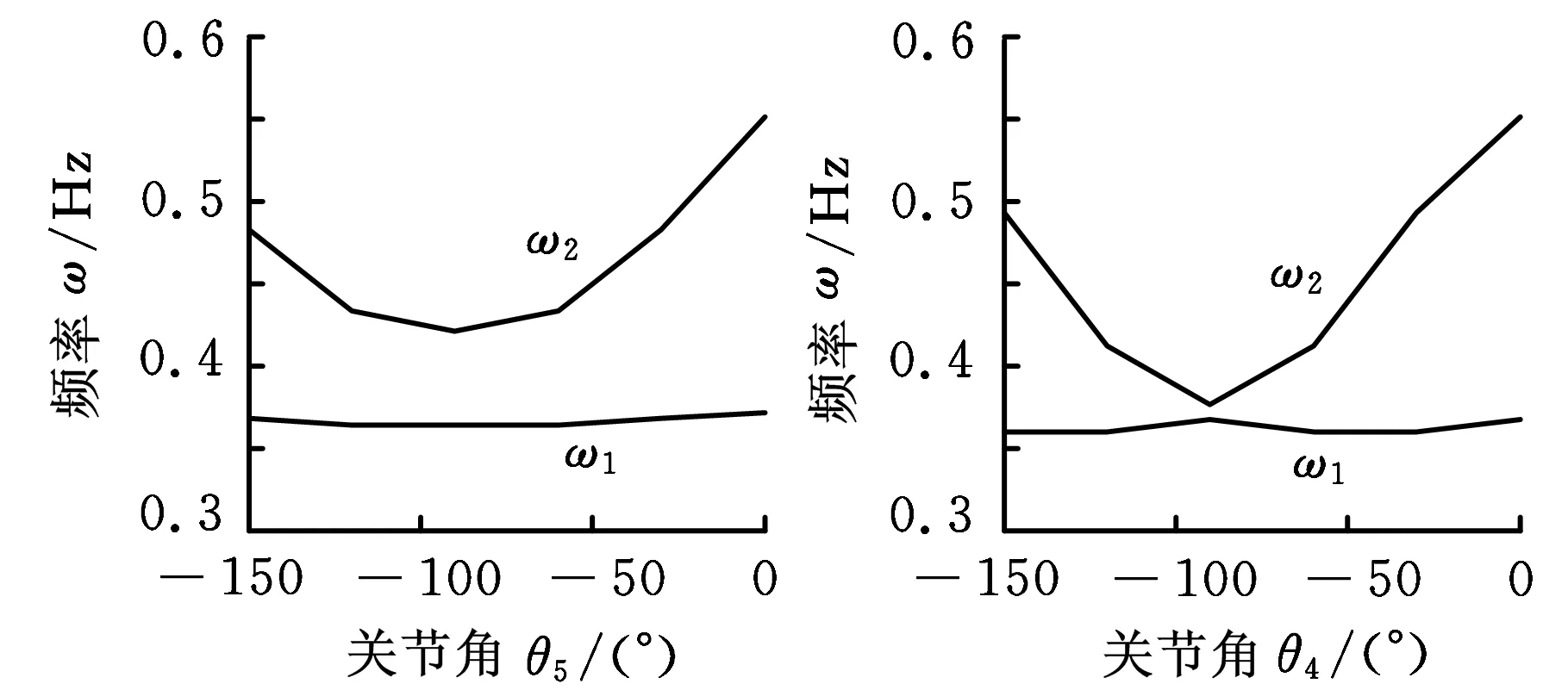
(e)臂架5角度的影响(f)臂架4角度的影响图4 臂架参数对固有频率的影响
(1)一阶、二阶固有频率都随臂架长度的增大而减小,而频率的变化率对于不同的频率阶数以及臂架节数而有所不同。随着臂架5长度的增大,系统一阶、二阶固有频率呈相似的递减趋势,臂架4长度的变化对二阶固有频率影响较大,但对一阶固有频率影响很小。
(2)一阶、二阶固有频率均随臂架刚度的增大而增大。其中,臂架5刚度的变化对一阶固有频率影响较大,而臂架4刚度的变化对二阶固有频率影响较大。
(3)一阶固有频率受关节角度θ4、θ5的变化影响不明显,而二阶固有频率随着关节角度的增大呈先减小后增大的趋势。由此可知,对于不同的位姿,臂架系统的固有频率会有不同。
3 实验验证
为验证理论分析的正确性,在52m长的混凝土泵车上进行了固有频率的测试。在本实验中,通过安装空间倾角传感器(SAS)来测试臂架的振动情况。应用工程机械用控制器TTC将采集的倾角传感器信号转换成实时角度信号,并通过CAN总线传输给DEWEsoft软硬件系统,将实时的角度信息在计算机中显示并存储到磁盘中。实验设备如图5所示。在本次实验中,系统的采样周期设为20ms。
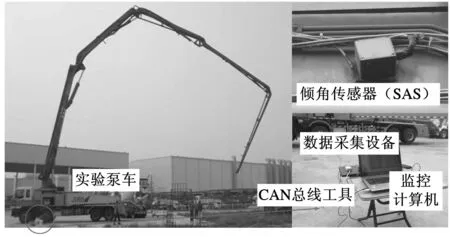
图5 臂架振动测试系统
实验过程中,将臂架预先展开到相应的水平姿态,通过施加外力改变臂架的初始位置,然后瞬间释放外力以激发臂架系统的振动。通过实验可以得知,在臂架振动过程中前三节臂的振动非常微弱,而后两节臂振动非常明显,这与模态分析中的结论一致。图6a给出了臂架系统的振动响应曲线,将测得数据进行快速傅里叶变换之后得到系统振动响应的幅频图,如图6b所示。根据图6所示曲线,可得臂架系统的一阶固有频率为0.3501Hz,而通过模态分析得到的一阶固有频率为0.3807Hz,与实测值接近,误差为8.7%。可见,应用解析法得到的分析结果能够反映臂架系统的振动特性,说明所建立臂架模型以及相应的理论分析是正确的。
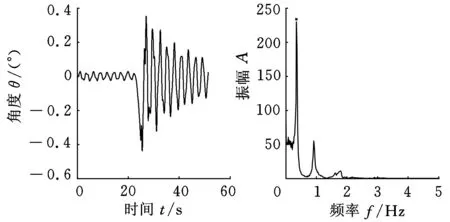
(a)振动响应曲线(b)幅频图图6 实验曲线
4 结语
本文针对52m五节臂混凝土泵车的臂架系统的振动特性展开了研究。在建立臂架系统柔性多体动力学模型的基础上,利用解析法得到了臂架系统的固有频率及振型,并分析了臂架的相关参数对臂架系统固有频率的影响,通过臂架系统固有频率的实验验证了理论分析的正确性。结果表明:①臂架系统的一阶固有频率与泵送频率相近,这是臂架系统在作业工况下产生大幅振动的主要原因;②臂架4、臂架5振幅较大,对整体振动起主要影响;③不同的臂架参数对固有频率影响不同,适当改变相应参数可使臂架系统的固有频率远离泵送工作频率,有助于减小系统振动。研究结果为泵车结构的优化、振动的抑制奠定了理论基础。
[1]俞慧友, 李箐箐, 陈樱子. 全球最长101米混凝土臂架泵车在长沙下线[N]. 科技日报, 2012-09-29(1).
[2]张大庆, 郝鹏, 何清华,等. 液压冲击对混凝土泵车结构振动性能影响的实验研究[J]. 机床与液压, 2004, 32(10): 103-107.
ZhangDaqing,HaoPeng,HeQinghua,etal.ExperimentalResearchaboutEffectoftheHydraulicImpactontheStructureVibrationCapacityofConcretePump[J].MachineTool&Hydraulics, 2004, 32(10):103-107.
[3]CazzulaniG,GhielmettiC,GibertiH,etal.OverviewontheTruckMountedConcreteBoomPump:aDynamicNumericalModelforActiveControlLogicDefinition[C]//Preprintsofthe18thIFACWorldCongress.Milano,Italy, 2011: 4232-4237.
[4]CazzulaniG,GhielmettiC,GibertiH,etal.ATestRigandNumericalModelforInvestigatingTruckmountedConcretePumps[J].AutomationinConstruction, 2011,20(8): 1133-1142.
[5]吕彭民, 汪红兵, 张大庆. 混凝土泵车结构模态分析与试验[J]. 长安大学学报(自然科学版), 2004, 24(6): 74-76.
LüPengmin,WangHongbing,ZhangDaqing.StructureModelAnalysisandExperimentTestofConcretePumpTruck[J].JournalofChang’anUniversity(NaturalScienceEdition), 2004, 24(6): 74-76.
[6]王斌华, 吕彭民. 混凝土泵车臂架系统振动机理的研究[J]. 振动与冲击, 2011, 30(9): 259-263.
WangBinhua,LüPengmin.VibrationMechanismofArmSystemofConcretePumpTruck[J].JournalofVibrationandShock, 2011, 30(9): 259-261.
[7]吕彭民, 汪红兵, 张大庆. 混凝土泵车冲击载荷对结构动态特性的影响[J]. 中国公路学报, 2003, 16(4): 115-117.
LüPengmin,WangHongbing,ZhangDaqing.InfluenceofStructuralDynamicCharacteristicbyConcretePumpTruck’sImpactLoad[J].ChinaJournalofHighwayandTransport, 2003, 16(4): 115-117.
[8]刘杰, 戴丽, 赵丽娟,等. 混凝土泵车臂架柔性多体动力学建模与分析[J].机械工程学报, 2007, 43(11):131-135.
LiuJie,DaiLi,ZhaoLijuan,etal.ModelingandSimulationofFlexibleMulti-bodyDynamicsofConcretePumpTruckArm[J].JournalofMechanicalEngineering, 2007, 43(11):131-135.
[9]吴智勇, 周翔, 胡德文,等. 基于时滞补偿方法的混凝土泵车臂架主动减振[J]. 中国机械工程, 2013, 24(24): 3283-3288.
WuZhiyong,ZhouXiang,HuDewen,etal.ActiveVibrationSuppressionforBoomofConcretePumpTruckBasedonTime-delayCompensationApproach[J].ChinaMechanicalEngineering, 2013, 24(24): 3283-3288.
[10]朱祥华, 高翔, 王寅晓. 混凝土泵车臂架有限元分析[J]. 机床与液压, 2012, 40(5): 138-142.
ZhuXianghua,GaoXiang,WangYinxiao.FiniteElementAnalysisontheBoomSystemofaConcretePumpMountedonTruck[J].MachineTool&Hydraulics, 2012,40(5): 138-142.
[11]陆佑方.柔性多体系统动力学[M].北京: 高等教育出版社, 1996.
(编辑王艳丽)
Vibration Analysis and Experimental Test of a Boom System of Truck Mounted Concrete Pump
Liu RongshengLi HuiGao YingjieYang Yulin
Yanshan University,Qinhuangdao,066004
An analytic method was applied to study the vibration performance of the 52-meter-long five-boom system of truck mounted concrete pump. The combination of Lagrange’s equations of the second kind and assumed mode method was utilized to establish the flexible multi-body dynamics equation of the boom system. Based on the dynamic model, modal analysis was implemented and numerically solved by MATLAB, and the first ten nature frequencies and modes of vibration of the boom system were acquired. The impacts of the boom parameters on nature frequencies of the boom system were also analyzed. In addition, vibration experiments on a real boom system were implemented to verify the theoretical nature frequency. The research results can provide basis for the improvement of the boom structure and the further research of vibration control.
boom system of truck mounted concrete pump; flexible multi-body dynamics; modal analysis; natural frequency
2015-02-05
国家自然科学基金资助项目(50875228)
TH6DOI:10.3969/j.issn.1004-132X.2015.15.023
刘荣升,男,1983年生。燕山大学机械工程学院博士研究生。主要研究方向为多自由度大型串联臂架系统的运动学、动力学分析及智能控制。发表论文4篇。李慧,女,1987年生。燕山大学机械工程学院硕士研究生。高英杰(通信作者),男,1965年生。燕山大学机械工程学院教授、博士研究生导师。杨育林,男,1953年生。燕山大学机械工程学院教授、博士研究生导师。
