抽油机用机械式无切换换向装置设计
2015-08-04崔俊国肖文生傅登伟李延隆
刘 健,崔俊国,肖文生,傅登伟,杨 林,李延隆
抽油机用机械式无切换换向装置设计
刘 健,崔俊国,肖文生,傅登伟,杨 林,李延隆
(中国石油大学(华东)机电工程学院,山东青岛266580)
油田开采难度的不断增加对抽油机提出了长冲程、低冲次等新的要求。通过分析现有主要换向机构的特点,设计了适合长冲程抽油机的导杆齿轮组合式机械无切换换向机构。对传动机构进行了运动学分析,得出了摆动导杆机构的运动曲线。对该装置的关键结构进行了设计分析,并以该装置为基础,研发了机械式无切换换向抽油机。
抽油机;换向器;导杆齿轮组合机构;运动学分析
随着油田开发进入中后期,要保持油田的稳产、高产,就需要有足够的采液量(大泵提液);另一方面,为开发低渗透、低品位油藏,需要小排量深抽(小泵深抽),以保持油层在较大压差下生产;另外,稠油井和多气井的数量也不断增加。这些客观因素都要求发展长冲程、低冲次抽油机[1]。滚筒式抽油机是长冲程、低冲次抽油机的理想机型,目前困扰该机型发展和推广的主要问题是换向机构的可靠性较差[2]。目前,常用的换向机构均存在自身的不足和局限性,其使用领域和能够满足的工作要求也不尽相同。
1) 液压换向。在液压泵供给液压源的基础上,用控制液压马达的旋向来实现滚筒的正反转。缺点是液力传动系统效率较低、经济性差、液压系统频繁换向、整个系统可靠性降低[3-4]。
2) 电机换向。利用控制电机的旋向来达到控制滚筒转向目的,对电机的性能要求较高[5]。
3) 机械换向。这是目前国内外研究、试制较多的一类换向机构,用机械的方法来控制滚筒的转向,可以分为3类:
①切换式。利用切换方式来控制动力源的流向,达到改变滚筒转向的目的,主要包括离合器切换和拨板切换[6];存在切换机构寿命短的缺点。
②软切换式。利用齿轮在啮合过程中与不同齿轮的啮合来切换滚筒的旋向,在换向时虽有切换过程,但冲击会小些。
③无切换式。不用切换使滚筒旋向改变,能够减少和消除换向时的冲击,避免了因切换而引起的问题,比较理想[7]。
1 技术分析
根据上述对于滚筒式抽油机换向机构的分析与评价,本文设计了基于导杆齿轮组合机构原理的机械式无切换换向装置,达到了换向的目的,属于无切换换向装置的范畴。
1.1 结构及原理
机械式无切换换向装置结构如图1所示,创新之处在于:曲轴的单方向旋转即可实现小齿轮的换向运动,不需要切换装置。结构原理为:导杆与大齿轮固定连接,曲轴转动通过滑块机构带动导杆上下摆动,大齿轮随之在一定角度范围内往复转动,选择合适的传动比,从而实现小齿轮的换向旋转运动。
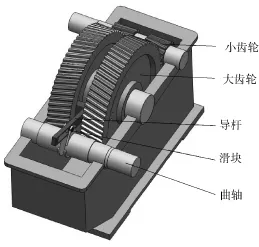
图1 机械式无切换换向装置结构
1.2 关键结构设计
1.2.1 齿轮
本设计中,齿轮采用对称布置,分流输出转矩,可以减小轴和齿轮的受力,减小换向机体的整体尺寸,便于制造、安装。该装置的传动原理如图2所示。
1.2.2 曲轴
曲轴有整体式曲轴和组合式曲轴2种形式[8]。本设计中采用组合式曲轴,如图3所示。它由曲轴左半部、曲轴右半部和曲轴销组成,通过液压压入的方法将其结合起来。该结构加工简单,无需大型模锻设备。
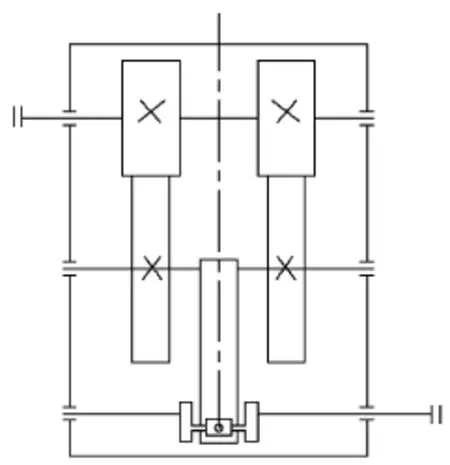
图2 传动原理

图3 曲轴结构
1.2.3 导杆连接
为了避免导杆与大齿轮轴连接后降低大齿轮轴的强度,所以将导杆直接与大齿轮相连。
2 运动学分析
机械式无切换换向装置的核心为摆动导杆机构。为了减小大齿轮轴的应力集中现象,提高轴的扭转刚度和弯曲刚度,综合考虑安装时的装配精度等,将导杆连接于大齿轮上,使结构更加简单紧凑,减轻了传动机构的质量,节省了材料。此时的机构运动分析仍然可以由完整的摆动导杆机构的运动分析来表征,如图4~5所示。
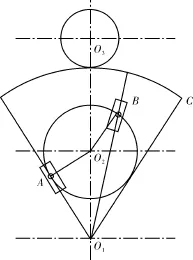
图4 摆动导杆机构工作原理

图5 摆动机构导杆原理
图5中:曲柄O2B为原动件,以等角速度ω2转动,其长度为l2,角位移为Φ2,曲柄回转中心与导杆回转中心的中心距为l1,其中O1B与O2B与x轴正方向的夹角分别为φ1、φ2。
假设O1B为S,曲柄角位移方程为

则B点的坐标为

建立摆动导杆机构封闭矢量方程,有

将矢量方程投影到x轴和y轴上,得

经计算得

式中:φ2不等于90°和270°。

式(7)为摆动导杆O1B在1个周期内的转角函数φ1的表达式。
为建立摆动导杆角速度函数,将式(6)关于t求导数得
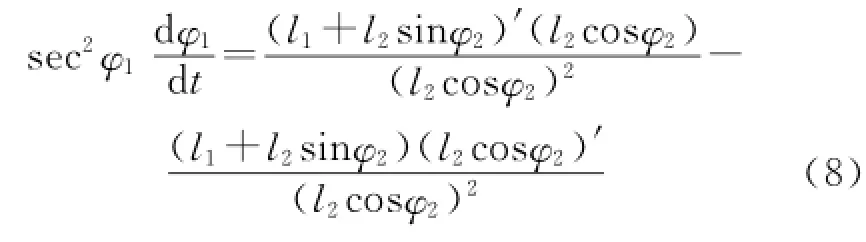
化简式(8)得

式(9)为摆动导杆O1B在1个周期内角速度函数ω1的表达式。由式(9)求得

式中:0°≤φ2<360°。
为建立摆动导杆角加速度函数,将式(10)关于时间t求导得
化简式(11)可得

式(12)为摆动导杆O1B在1个周期内角加速度函数ε1的表达式。
若摆动导杆机构从右下45°(即φ2=45°)开始运动,将数据代入得ω2=6.6 r/min,l2=200 mm,l1=1 010 mm。
对应的1个周期的摆动导杆角速度特性曲线和角加速度特性曲线如图6~7所示。

图6 摆动导杆角速度特性曲线
由图6可以看出:摆动导杆从0时刻开始加速,在t1时刻角速度到最大速度ω后开始减速;在t2时刻角速度减小到零后换向加速;在t3时刻反向角速度达到最大ω后开始减速;在t4时刻速度减小到零,完成1个周期往复运动。
由图7可以看出:摆动导杆的角加速度曲线与角速度曲线相对应,即角速度为零时(0、t2、t4时刻),正向或反向角加速度为最大ε;在角速度正向或反向达到最大时(t1、t3时刻),角加速度变为零。
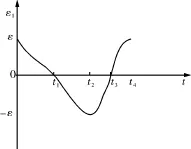
图7 摆动导杆角加速度特性曲线
3 性能特点
1) 主机构采用了摆动导杆机构,原理简单,方案可靠。
2) 机构具有急回特性,缩短了非工作行程的时间,提高工作效率。
3) 结构简洁,机械故障率和制造成本低。
4) 传动效率高,转动力矩大,可用于润滑状况差的工作环境。
5) 左、右对称设计,结构受力合理,稳定性好。
6) 采用了分流输出转矩方式,结构更加紧凑。
4 机械式无切换换向抽油机
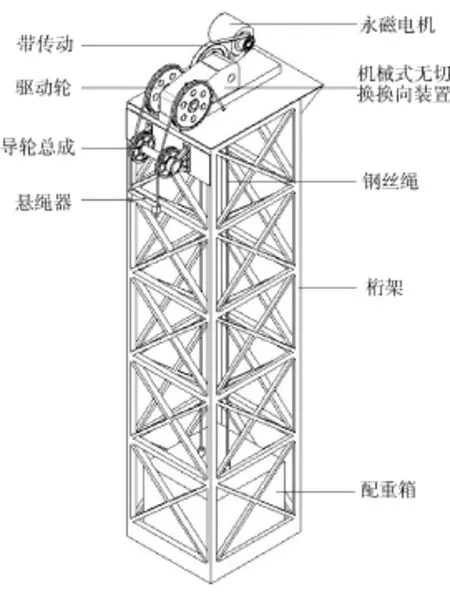
图8 机械式无切换换向抽油机结构示意
以机械式无切换换向结构为基础,设计了16-08-070型机械式无切换换向抽油机。最大悬点载荷160 k N,冲程8 m,允许的最大载荷差70 k N,结构如图8所示。工作原理为:利用低速大转矩永磁同步电机加一级带传动驱动,通过该换向装置,实现驱动轮的往复转动,从而由悬绳器带动抽油杆上下往复运动,实现采油作业。
该抽油机能够实现长冲程、低冲次,并具有运转换向平稳、振动噪声小、节能、维修方便等优点。
5 结论
1) 通过分析现有主要换向机构的特点,设计了机械式无切换换向结构,对传动机构进行了运动学分析,得出了摆动导杆机构运动规律曲线。
2) 对该装置的关键结构进行了设计分析,并分析了该装置的特点。
3) 以该装置为基础,设计了机械式无切换换向抽油机。
4) 本机构在运动学、动力学上有其自身的优越性,但是目前仍然没有找到可靠的方法准确校核该换向装置的工作寿命,在这方面还需要进一步研究。
[1] 张自学,兆文清,王钢.国内外新型抽油机[M].北京:石油工业出版社,1994:55-59.
[2] 采油技术手册编写组.采油技术手册[K].北京:石油工业出版社,1984:578-583.
[3] Jean J M ourlevat,Tho mas B M orrow.Recently Developed Long Stroke Pu m pingU nit Incorporates Novel Flexibility for a Wide Variety of A pplications[G].SP E 11338,1982.
[4] 严少雄,白树泰.长冲程滚筒式液压抽油机[J].石油矿场机械,1994,23(1):40-42.
[5] 綦耀光,陈军.电机换向滚筒式抽油机的动力性能分析[J].石油矿场机械,2008,37(3):62-65.
[6] Roy D E wing.Long Stroke Pu m ping U nit[G].SP E 3186,1970.
[7] 张少波,陈义保,高和平.滚筒式抽油机无切换换向机构设计[J].石油机械,1998,26(7):4-6.
[8]成大先.机械设计手册[K].北京:化学工业出版社,1992.
Design of M echanical Reversing Device without Switching for Pum ping Unit
LIU Jian,CUI Junguo,XIAOW ensheng,FU Deng wei,YANG Lin,LI Yanlong
(College of M echanical and Electronic Engineering,China Uniuersity of Petroleu m(H uadong),Qingdao266580,China)
New-type pu m ping units with characteristic such as long-stroke and low-velocity are necessary because of the increasing exploitation difficulty in oilfield.M echanical reversing device without switching based on co m bined mechanism of guide-bar and gear for pu m ping unit are designed according to the analysis of the current reversing devices.T he kinematics analysis of this mechanism is carried out and the law of m otion of the swing guide-bar mechanism is obtained.A new kind of pu m ping unit based on mechanical reversing device without switching is developed.Keywords:pumping unit;commutator;combined mechanism of guide-bar and gear;kinematics analysis
T E933.103
A
10.3969/j.issn.1001-3842.2015.01.007
1001-3482(2015)01-0026-04
2014-06-11
刘 健(1970-),男,江苏赣榆人,副教授,博士,主要从事石油机械及动态测试技术研究。
