基于占空比调节的火炮PMSM直接转矩控制系统研究
2015-07-18韩崇伟陈腾飞张志鹏
韩崇伟,陈腾飞,李 伟,杨 刚,张志鹏
(西北机电工程研究所,陕西咸阳 712099)
基于占空比调节的火炮PMSM直接转矩控制系统研究
韩崇伟,陈腾飞,李 伟,杨 刚,张志鹏
(西北机电工程研究所,陕西咸阳 712099)
为满足火炮调速系统速度平稳、调速范围宽的使用要求,必须降低调速电机的输出转矩脉动。通过对传统PMSM直接转矩控制方法的转矩脉动进行分析,得出零空间电压矢量具有保持电机电磁转矩作用的结论。在此理论基础上,采用了空间电压矢量占空比控制,即根据转矩误差,计算出在一个控制周期内有效电压空间矢量的作用时间,以减小电机转矩脉动。仿真与试验结果表明采用该方法与传统直接转矩控制相比,降低了电机输出的转矩脉动,且低速性能较好,拓宽了调速范围。
直接转矩控制;占空比调节;交流永磁同步电动机
交流永磁同步电机(PMSM)具有功率密度大、质量轻、免维护等特点,在新一代火炮先进随动系统中得到普遍应用。PMSM直接转矩控制方法的优点是不需要对电流进行解耦控制,计算简单,控制系统具有动态响应快,参数依赖少等特征,是目前PMSM高性能交流调速系统研究的热点[1]。
传统直接转矩控制(DTC)系统通常采用滞环控制选择合适的电压矢量,驱动电机跟踪给定的电磁转矩和定子磁链,实现电机的运动控制。由于在实际的控制系统中,系统采样频率要受到微处理器计算能力和功率器件驱动效率等因素的物理限制,导致采样频率存在一定的限制范围,直接引起电机转矩脉动现象,转矩脉动大是直接转矩最显著的缺点[2-3]。转矩脉动会导致系统低速运行性能差,影响电机的调速范围。文献[4]提出带零电压矢量的新型电压矢量开关表,但转矩脉动减小并不明显。文献[5]提出了SVPWM- DTC方案,电机控制效果较好,但是需要电机转子轴端安装测角传感器以获得精确的转子角度信息,用来计算定子磁链,并且该方法比较依赖于电机的参数,对电机参数变化比较敏感。文献[6- 7]提出了基于占空比控制技术的异步电机直接转矩方案,实验证明采用占空比控制可以有效减小电机转矩脉动,改善低速性能。文献[8- 9]分别提出了基于PMSM数学模型的占空比预测算法,但是这两种算法都需要用到电机的数学模型,依赖电机参数且计算较为复杂。文献[10]提出了基于定子磁链误差和转矩计算占空比的简化算法,但是电机的响应速度受到较大的影响。为了降低火炮电机调速系统电机输出的转矩脉动,提高调速比,提出了根据PI控制器对占空比进行调节的控制方法,经建模与仿真研究表明,有效解决了火炮电机调速系统转矩脉动大问题。
1 火炮调速系统组成
火炮调速系统如图1所示。火炮调速系统由方位向调速系统和高低向调速系统组成,主要包括交流驱动器、伺服电机、减速箱等部分。火炮调速系统接收位置控制器或半自动操纵台给定的速度主令,完成俯仰调炮或方位回转调炮。伺服电机采用永磁同步电机,电机内安装有旋转变压器,为交流驱动器提供伺服电机转轴的角度信息。由于火炮车载电源体制的限制,火炮调速系统一般采用低压永磁同步电机,其转速高、功率大。这种类型的永磁同步电机定子电感定子磁链均较小,采用传统直接转矩控制时,往往会有较大的转矩脉动。

笔者以方位向调速系统为应用对象,研究基于占空比调节的火炮PMSM直接转矩控制方法。
2 方位向执行电机数学模型
某火炮方位向执行电机为面装式交流永磁同步电机,建立PMSM数学模型时,进行如下假设:
1)忽略电动机铁心的饱和。
2)不计电动机中的涡流和磁滞损耗。
3)转子无阻尼绕组。
4)电动机的相电流为对称的三相正弦波电流。
永磁同步电机的定子电压方程,定子磁链方程和电磁转矩方程分别如式(1)~(3)所示:

式中:us为定子电压矢量;is为定子电流矢量;Ψs为定子磁链矢量;Ψf为永磁体磁链矢量;Rs为定子相电阻;Ls为定子电感;pn为电机极对数;Te为电磁转矩。
图2为PMSM在αβ固定坐标系下的数学模型。θe为永磁体磁链矢量电角度,θs定子磁链矢量所处的电角度,δ为Ψs与Ψf之间的夹角,一般称δ为负载角。

将负载角δ代入式(3)得:

式中:Ψf为Ψf的模;Ψs为Ψs的模。
一般可认为在运行过程中Ψf和Ls保持不变,且在电机稳态运行时,当定子电压为零矢量时,Ψs幅值和相位不变,则可得到Te关于负载角δ的导数:

Ψf随电机转子转动,负载角减小,若电机转速为ωm,由转子转动引起的负载角变化量Δδm可以表示为

以本文选用的电机为例,当ωm为50 r/min,采样时间周期ts选取50μs,pn为2,Δδm为-0.03°,在系统接近额定负载时,δ一般约为90°,此时δ≫Δδm,因此采用零电压矢量进行控制时,在低速范围段,由式(5)可认为ΔTe基本为零,说明零矢量对转矩的影响小。
一般情况下,Rsis可忽略不计,当对电机施加非零电压矢量Vn时,在一个采样周期ts内,磁链的变量ΔΨs可由式(1)得到:

在直接转矩控制时,为保证最优控制,选择的Vn一般与Ψs接近正交,所以仍可认为Ψs幅值保持不变,所以在施加有效电压矢量时,式(5)仍然成立。由ΔΨs引起的负载角变化Δδe可表示为:

以本文采用的电机为例,母线电压为56 V,则|Vn|为37.4 V,ts选取50μs,Ls为0.22 mh,Ψf约为0.026 V·s,在满载情况下,Ψs约为0.031 V·s。由转子转动引起的负载角变量Δδm可由式(6)得到,在电机ωm为50 r/min时,可以得到Δδe≈2.6°,则Δδe≫Δδm。由以上推导可得出以下结论:在电机低速时,零矢量对转矩变化的影响较小,电机的转矩脉动与施加的有效定子电压矢量的幅值和作用时间直接相关,因此,控制有效电压控制矢量在一个控制采样周期内的占空比,可以减小电机输出转矩的脉动。


3 基于占空比调节的火炮PMSM直接转矩控制方法
两电平逆变器和电机的连接原理图如图3所示,1~6分别为逆变器A、B、C三相的上下桥。忽略逆变器死区时间,逆变器上下桥的开关状态互补,逆变器状态采用SA、SB、SC表示,1、3、5闭合时SA、SB、SC取1;1、3、5关断时SA、SB、SC取0。SA、 SB、SC按顺序共有8种不同的状态组合,即000、001、010、011、100、101、110、111,其中000和111为两个零电压,分别标为u0、u7,其余6个有效电压矢量按二进制数的顺序标记为u1~u6。
将定子电压磁链所在的空间分为6个扇区,每个扇区占据60°电角度,如图2所示,①~⑥的位置分别为[-30°,30°]、[30°,90°]、[90°,150°]、[150°,210°]、[210°,270°]、[270°,330°]。根据Ψs所处的扇区及磁链与转矩的滞环比较结果选择合适的电压矢量进行控制,选择如表1所示。其中TSW、ΨSW分别为转矩滞环和磁链滞环比较结果。

式中,Tref、Ψref为给定的参考转矩和参考磁链。

表1 电压矢量选择表
图4为基于占空比调节的PMSM直接转矩控制原理。
速度控制器采用PI调节器,输出为参考转矩,将磁链和转矩进行滞环比较后,结合扇区的计算结果,选出合适的电压矢量。有效电压矢量的占空比kduty由转矩误差经PI控制器调节后给到PWM产生模块,输出PWM信号控制逆变器进行变频。
图4中的电压转换和电流转换计算us和is在αβ坐标系下的分量uα、uβ和iα、iβ,计算式为

式中:iA、iB为定子A、B相的相电流;VC为直流母线电压值。
定子磁链估计为

式中,上标k表示离散系统的采样时刻。
定子磁链幅值为

电磁转矩为

定子磁链所在的扇区由Ψα、Ψβ的斜率关系给出:

参考定子磁链由式(18)给出,可实现最大转矩电流比控制:

计算流程为:
1)计算uα、uβ和iα、iβ。
2)计算定子磁链Ψα、Ψβ和Te。
3)计算Ψs所处的扇区NSector。
4)调用速度控制器计算Tref,计算参考磁链Ψref。
5)根据转矩误差Tref采用PI控制器计算占空比kduty。
6)计算滞环比较结果Tsw、Ψsw,根据NSector查询表1,得到电压矢量。
7)根据kduty和电压矢量进行PWM调制,生成PWM控制信号。SA+SB+SC=1时,零矢量采用000;SA+SB+SC=2时,零矢量采用111。
4 控制系统仿真分析
采用Matlab的simulink工具箱函数和m语言函数建立如图5所示的PMSM直接转矩控制仿真系统,仿真系统离散步长为1μs。

逆变器采用IGBT三相桥,IGBT三相桥和PMSM仿真模型直接采用Matlab simulink工具箱中的模块,PMSM参数如表2所示,在试验中最大负载转矩为4.2 N·m。
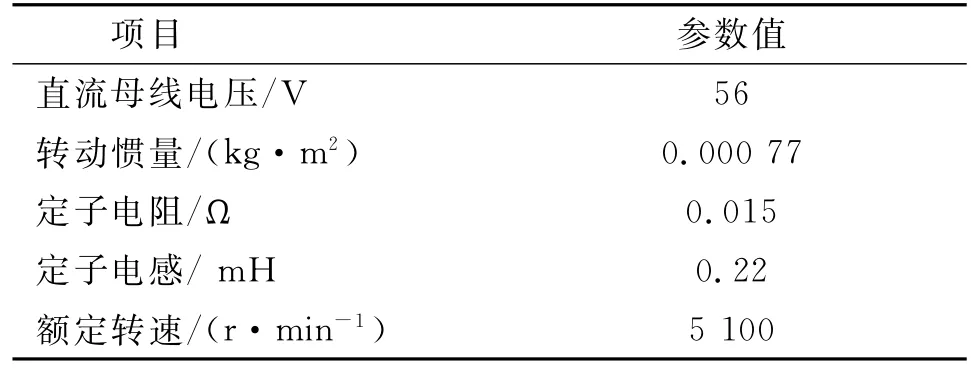
表2 方位执行电机J115ST- X04参数
PMSM直接转矩控制仿真系统包括PMSM模块、IGBT模块、Clarke变换模块、Stator Flux clac模块、Stator Voltage calc模块、Te control模块和PWM产生模块。
Clarke模块采用式(12)计算iα、iβ,Stator Voltage calc模块采用式(11)计算uα、uβ,Stator Flux clac模块采用式(13)计算Ψα和Ψβ。3个模块均采用编写m语言函数实现,模块采样时间均为75μs。
Te control模块采用嵌入式M-function编写,采样时间为75μs,包括定子磁链扇区NSector计算函数,参考定子磁链Ψref计算,电磁转矩Te计算,转矩和磁链滞环控制,开关表选择和电压矢量的产生。函数编写参考表1,式(9)、(10),(14)~(18)。
PWM模块根据给定的电压矢量和占空比kduty进行PWM调制,产生PWM信号控制IGBT三相桥。
速度PI控制器采样周期为300μs,占空比PI控制器采样周期为75μs。
图6和图7分别为给定转速10 r/min时电机的速度和转矩的曲线,图8和图9分别为给定转速5 100 r/min时电机的速度和转矩的曲线。其中图6和图8为传统DTC控制结果,图7和图9为基于占空比控制时的DTC控制结果。

由图6和图7对比表明,转速在10 r/min时,传统DTC的转矩脉动量为±2 N·m,速度的波动为10 r/min,低速性能差;采用占空比DTC控制时,转矩脉动量为±0.1 N·m,转矩脉动很小,速度的波动为2 r/min,低速性能较好。

图8和图9对比,转速在5 100 r/min时,传统DTC的转矩脉动量为±3 N·m,采用占空比DTC控制时,转矩脉动量为±1 N·m,说明在电机高速时,采用占空比控制也能在一定程度上降低电机的输出转矩脉动。
基于占空比调节的火炮方位向PMSM直接转矩控制系统台架试验结果如表3所示。

表3 方位向电机控制系统台架试验结果
以上仿真和台架试验结果表明,采用占空比控制时,在全速范围内有效抑制了电机转矩脉动,提高了低速性能。
5 结论
笔者设计了一种基于占空比调节的PMSM直接转矩控制系统方案。分析了采用占空比方法的直接转矩控制原理,对系统方案进行了详细的介绍。搭建了基于PI占空比调节的PMSM直接转矩控制系统仿真平台;并进行了台架试验。仿真与试验结果验证了基于占空比调节的PMSM直接转矩控制系统,与传统DTC相比,具有转矩脉动小,低速性能较好的特点。
(Referenees)
[1]周忠扬,胡育文.交流电动机直接转矩控制[M].北京:机械工业出版社,2010.ZHOU Zhongyang,HU Yuwen.Direct torque control of AC motors[M].Beijing:China Machine Press,2010.(in Chinese)
[2]LI Zhong,RAH MAN M F,HU Yuwen,et al.Analysis of direct torque control in permanent magnet synchronous motor drives[J].IEEE Transactions on Power Electronics,1997,12(3):528- 536.
[3]VYNCKE J,BOEL R K,MELKEBEEK J A A.Direct torque control of permanent magnet synchronous motors-an overview[C]∥3rd IEEE Benelux Young Researchers Symposium in Electrical Power Engineering.UGent:EESA,2006,28:1- 5.
[4]田淳,胡育文.永磁同步电机直接转矩控制系统理论及控制方案的研究[J].电工技术学报,2002,17(1):7- 11.TIAN Chun,HU Yuwen.Study of the scheme and theory of the direct torque control in permanentmagnet synchronous motor drives[J].Transactions of China Electro Technical Society,2002,17(1):7- 11.(in Chinese)
[5]SWIERCZYNSKI D,KAZMIERKOWSKI M P.Direct torque control of permanent magnet synchronous motor(PMSM)using space vector modulation(DTC-SVM)-simulation and experimental results[C]∥2002 IEEE 28th Annual Conference of the Industril Electroincs Society.New York:IEEE,2002:751- 755.
[6]袁登科,陶生桂,康劲松.一种改善低速转矩脉动的直接转矩控制系统[J].铁道学报,2005,27(2):44- 48.YUAN Dengke,TAO Shenggui,KANG Jinsong.Novel direct torque control with improved performance in the low speed region[J].Journal of the China Railway Society,2005,27(2):44- 48.(in Chinese)
[7]魏欣,陈大跃,赵春宇.一种基于占空比控制技术的异步电机直接转矩控制方案[J].中国电机工程学报,2005,25(14):93- 97.WEI Xin,CHEN Dayue,ZHAO Chunyu.A new direct torque control strategy of induction motors based on duty ratio control technique[J].Proceedings of the CSEE,2005,25(14):93- 97.(in Chinese)
[8]PACAS M,WEBER J.Predictive direct torque control for the pm synchronous machine[J].IEEE Transactions on Industrial Electronics,2005,52(5):1350- 1356.
[9]徐艳萍.钟彦儒.基于占空比控制的永磁同步电机新型直接转矩控制策略[J].电工技术学报,2009,24(10):27- 32.XU Yanping,ZHONG Yanru.A new direct torque control strategy of induction motors based on duty ratio control technique[J].Transactions of China Electrotechnical Society,2009,24(10):27- 32.(in Chinese)
[10]ZH ANG Yongchang,ZHU Jianguo.Direct torque control of permanent magnet synchronous motor with reduced torque ripple and commutation frequency[J].IEEE Transactions on Power Electronics,2011,26(1):235- 248.
A Novel Duty Ratio Control Strategy Based DTC System for PMSM of Artillery
HAN Chongwei,CHEN Tengfei,LI Wei,YANG Gang,ZHANG Zhipeng
(Northwest Institute of Mechanical and Electrical Engineering,Xianyang 712099,Shaanxi,China)
DTC;Duty cycle control;PMSM
TJ303+.8
A
1673-6524(2015)04-0023-06
2014- 12- 22;
2015- 04- 15
韩崇伟(1963-),男,研究员级高级工程师,主要从事火炮自动控制系统技术研究。E-mail:hangreat202@163.com
Abstraet:To reduce the motor torque ripples,and increase the speed ratio of the artillery speed control system,it is necessary decrease torque ripples of the motor.Through the analysis of the torque ripples of the traditional direct torque control(DTC)system for permanent magnet synchronous motor(PMSM),the conclusion that zero voltage vector could keep the torque was obtained.According to this conclusion,a duty ratio control strategy based DTC system for PMSM is presented.The duration of the effective voltage vectors in one control cycle was calculated by the torque error to reduce the torque ripples of PMSM.The simulation results indicate that the proposed control scheme has a better performance than the conventional DTC scheme.Low torque ripple and excellent performance at low speed is achieved by using proposed scheme,and the motor speed control ratio is improved.
