视景仿真技术在靶场试验中的应用与系统开发
2015-07-18陈国利魏茂洲米中贺
陈国利,魏茂洲,李 博,米中贺
(中国白城兵器试验中心,吉林白城 137001)
视景仿真技术在靶场试验中的应用与系统开发
陈国利,魏茂洲,李 博,米中贺
(中国白城兵器试验中心,吉林白城 137001)
将视景仿真技术应用于靶场试验过程中的态势标绘、参试设备部署及弹道轨迹实时显示,对于试验的可视化具有重要意义。针对靶场试验指控显示需求,研究了实时数据处理技术,提出一种横向比较的快速融合算法,极大地减少了运算量。根据系统模型和当前测量信息,采用卡尔曼滤波预测落点坐标,提高了落点预报精度。分析了装备模型层级关系,研究了复杂武器装备模型机构动作控制方法。采用EV-Globe SDK组件构建了三维模拟显示平台。
计算机仿真;视景仿真;靶场试验;地理信息;三维显示
靶场信息化建设不但成为武器装备信息化发展的客观需求,而且已成为靶场自身发展和转型的必然趋势。三维视景仿真系统作为靶场信息化建设的一个重点,是基于地理信息和虚拟现实技术的三维可视化平台,其利用计算机仿真技术、测试数据处理技术、计算机图形技术及多媒体技术,对试验落区范围、危险区范围、清场范围、观测位置、测试仪器点位、装备运动路径、目标飞行航迹、弹丸运行轨迹等,以图标符号、文字或三维模型的形式标绘在三维场景中,不同视角展示试验态势布局,实时显示动态目标轨迹,为试验人员提供一个动态、可交互的虚拟试验环境,提高试验指挥决策的科学化、可视化和远程化。
1 靶场试验视景仿真关键技术
1.1 实时数据处理
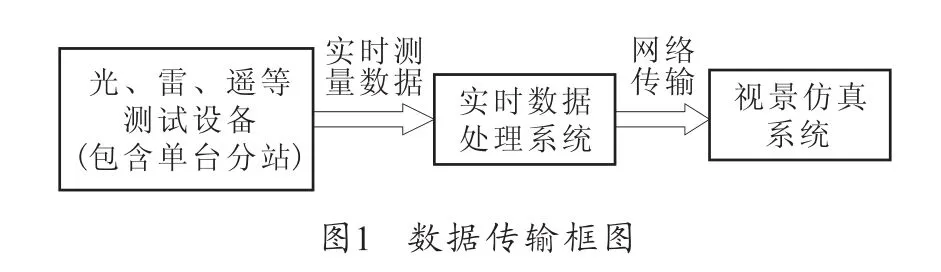
实时数据处理系统是连接各测试设备与指显系统的桥梁,其实质是一台具有稳定高速运算能力的工作站,可实时接收各测试设备实时发来的测试数据,经过平滑滤波、坐标转换后,在统一时统及坐标系下进行数据融合,然后将数据送给指显系统进行显示。数据传输框图如图1所示。
常规兵器靶场试验弹道测试中,一般情况下,弹道高相对较低,测控设备测试的数据质量较差,特别是在发射起始段与即将落地前的弹道弧段数据波动非常大。因此,实测数据无法直接用于三维视景仿真驱动,需要进行数据融合与平滑处理,包括对多源数据的自动优选和异常数据的剔除等。
1.1.1 实时数据融合
笔者提出一种横向比较的快速融合算法,即仅根据处理机接收到的各设备当前数据信息来确定融合结果。假设某时刻有n个测量设备同时对同一目标进行测量,分别得到实时目标位置数据传送到处理机,经过预处理、平滑滤波,转换后得到同一坐标系下的坐标数据(xi,yi,zi),i=1,2,…,n,定义第i个设备相对于第j个设备的模糊贴近度为:

式中,aij为归一化模糊度,aij∈(0,1]。
计算出每两个设备的模糊贴近度,可得到模糊贴近度矩阵A:
各测站数据综合模糊贴近度U可表示为:

式中:U=[u1u2… un]T;B为系数矩阵,其元素都为非负数,B=[b1b2… bn]T。
根据矩阵性质,可求得各测试设备的综合模糊贴近度:

根据模糊理论可知,模糊贴近度越大的设备,其可靠性与稳定性就越高,其权重就应取得越大,因此可用模糊贴近度来表示权重。设某时刻参与融合的n个设备测量值的相对权重为wi,则有:

故在某时刻,对目标的融合定位结果为:

1.1.2 数据平滑处理
数据平滑采用滑窗式5点二次预测进行平滑,也可以采用7点或者多点二次平滑,直到获取理想的平滑效果。当弹道测试数据波动很大时,需要先滤波,去除个别数据,然后再平滑。
1.2 落点预报
落点预报是利用雷达实时测量数据,采用外推的方法获取弹丸落点坐标[12],这里采用卡尔曼滤波[3-5]方法。
卡尔曼滤波是一种根据系统模型和当前测量信息估算系统状态变量的递推算法,可作为弹道重建的有力工具。卡尔曼滤波预报落点主要包括滤波状态模型的建立、滤波量测方程的建立和卡尔曼滤波弹道方程。
1.2.1 滤波状态模型

将质点弹道模型[4]作为外推弹道的状态方程:式中:H(y)为空气密度函数;c为弹道系数;G(vr)为阻力函数。式中变量含义详见文献[4]。
由于非线性方程(7)是弹箭质心运动方程,存在一定误差,因此引入状态扰动矢量W′作为随机噪声,则式(7)变为:

式中,W′服从方差为R的正态分布W′~N(0,R)。
1.2.2 滤波量测方程
设雷达测量值为斜距r,方位角β和高低角ε,则得到量测方程为:
式中,D为雷达测量噪声,服从方差为Q的正态分布,即D~N(0,Q)。
1.2.3 卡尔曼弹道滤波方程
卡尔曼只适用于线性系统,而(7)和(9)是非线性系的,需要离散化,经离散可得预测方程为:

预测方差为


1.3 模型动作控制
构建各种装备模型时,每个模型都位于其自身的局部坐标系中。还需要将这些装备组织在一起构成世界坐标系(全局坐标系)中的场景。位于局部坐标系中的物体通过一个称为世界变换的运算(过程)变换到世界坐标系中,该变换通过包括平移、旋转以及比例运算,分别用于设定该装备在世界坐标系中的位置、方向以及模型的大小。世界变换依据位置、大小和方向的相对关系将所有装备放置在世界坐标系中。
世界变换的运算是通过仿射矩阵来实现的,在模型中坐标为(x,y,z)的点,实体姿态的描述通常用欧拉角,欧拉角由3个自由度(h,p,r)组成。其中h代表偏航角,p代表俯仰角,r代表滚动角。世界坐标系的坐标为(x′,y′,z′)如图2所示。

对需要显示的三维模型进行模型变换,其变换后的结果可表示为

式中,T是一个4×4的变换矩阵,是模型坐标经过平移、旋转、反射等各种变换后的结果[3]。
对于空间运动的试验目标,可以视为由一系列刚体的独立运动组成。以坦克为例,它的空间运动是由底盘运动、炮塔旋转和火炮俯仰3个独立运动构成。3个运动之间通过一定的约束关系,来保证坦克运动与客观情况相符。这种关系用阶层关系来表示。模型中做刚体运动的最小部件称为节点,每一节点的空间运动受其连接的上一级节点(父节点)影响,同时对连接到该节点上的下一级节点(子节点)的运动产生影响,为了方便描述引入下列定义:
1)模型只有一个根节点p0。
2)对于模型中每一节点pi,可以有多个子节点pij,但只能有一个父节点pi(f)。
3)模型坐标系与根节点p0固联。
4)每一节点的初始位置用固联坐标系下的初始变换矩阵IMi描述。
根据阶层关系,模型的空间运动可以表示为所有节点运动的组合,每一节点的运动可由其父节点空间变换矩阵与节点初始变换矩阵以及节点运动变换矩阵确定,如式(17),其中Mij(f)为父节点空间变换矩阵。

2 三维视景仿真系统设计
三维视景仿真[6-8]系统包括三维视景仿真服务器、三维显示软件和模型库。
2.1 系统结构设计
系统实现采用三层结构体系建设:数据层、技术支持层和应用层。数据层主要实现业务数据库、地图数据库的构建和实时数据接入,以及数据的收集、整理与入库;技术支持层主要实现数据通信,地图数据和DEM(数字高程模型)、DOM(数字正射影像图)的联接以及应用系统接口;应用层在技术支持层的基础上实现系统主要功能,包括三维视景仿真、多源数据融合处理、实时落点预测、落点综合评判应用4个子系统,如图3所示。

2.2 系统功能设计
系统具有试验态势标绘功能、动态目标模拟显示功能、落点预报功能、数据存储与回放功能及地理分析功能。系统功能设计如图4所示。

2.2.1 地图数据处理系统
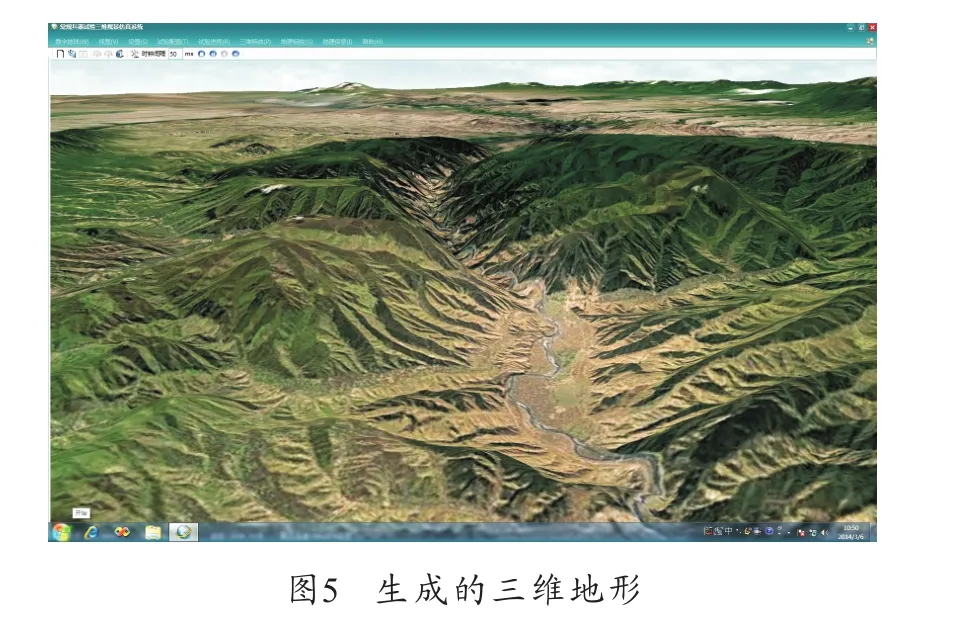
将高精度的遥感影像作为纹理贴到由DEM数据所构成的三维模型上,便构成了地形模型。如何在DOM和DEM数据之间进行准确配准和等比例对应是保证三维地形精度的关键,而三维可视化的视觉效果取决于影像的辐射特性。
为了增强三维地形的真实感和视觉效果,在进行纹理映射前必须对遥感影像进行预处理。通过辐射校正和几何校正来解决遥感影像和DEM数据之间的配准精度问题,而遥感影像与DEM数据之间的对应关系可以由成像时的相点与地面点之间的几何关系求得。由于遥感影像与地形数据区域并不一定完全一致,所以需要对遥感影像进行镶嵌和裁剪处理,使得影像和数据对应。图5是利用遥感影像生成的三维地形图。
2.2.2 三维视景仿真系统
三维视景仿真系统包括试验配置模块、综合信息显示模块、三维模型控制模块、落点预报模块和地理分析模块等,功能模块如图6所示。

2.2.2.1 试验配置模块
该模块提供试验信息、理论弹道、试验区域、测试设备布站、实时文字信息显示、实时弹道曲线等试验综合显示信息的配置功能;提供飞行目标模型导入,最多支持16个运动目标模型动作配置等功能。模型动作设计包括显示选中运动目标模型的结构框架、对需要在试验过程中执行特殊动作的部件配置动作参数、为部件附加尾焰等三维特效、设置模型运动控制指令、指令编码等。
2.2.2.2 综合信息显示模块
该模块主要构成如图6所示。试验要素标绘以KML标绘为基础,进行试验点位、规划区域、阵地设施等试验要素标绘,并在KML树中进行集中管理。文字显示窗口以可渲染对象为基类进行定制开发,可以在屏幕坐标中显示,并可以调整显示效果。运动目标实时坐标信息可以根据实时数据显示靶场坐标、经纬度坐标、姿态角等数据;试验进程显示可以显示试验进度、特征事件、控制指令等文字信息。综合信息显示界面如图7所示。
2.2.2.3 三维模型驱动模块
在主窗口中显示理论弹道曲线、实时弹道曲线。当系统接收到实测数据后,驱动模型在场景中显示。运动目标的动作细节以独立窗口的形式实现画中画功能。
2.2.2.4 落点预报模块
主要包括理论弹道参数设置、网络参数设置等,落点预报界面如图8所示。
该模块针对无控弹丸,在降弧段开始预测弹丸落点,每隔1 s进行一次预测,预测结束后,平均所有预测值得到最终落点。
2.2.3 实时数据处理系统
主要包括对网络端口、模拟数据等进行设置,完成发送模拟数据、接收并发送实时数据功能等。端口及数据发送关系如图9所示。

功能界面如图10所示。

2.3 系统开发环境
试验视景仿真系统开发工具为Visual Studio2008,采用面向对象技术和模块化技术进行软件开发。开发语言使用基于Microsoft.NET3.5程序框架的C#。采用EV-Globe SDK工具开发包[9]实现。
EV-Globe SDK是国遥新天地公司自主研发并拥有知识产权的核心平台软件,集成了地理信息和三维软件技术,对各种功能作了很好的封装。具有直观全空间三维可视化表达、海量多源数据集成、快捷二三维一体化应用、高效三维模型渲染与分析、专业多维度空间分析能力和开放平台与多渠道信息发布等特点,是大型空间信息服务平台。
3 结束语
三维视景仿真系统将发射、测控、通信等各系统传来的信息进行集中处理并显示,对试验任务的“可测、可知、可视”具有重要作用。针对靶场试验特点研究了视景仿真关键技术,结合靶场试验需求,设计了视景仿真原型系统,实现了三维显示等功能。
(Referenees)
[1]张毅,苏娟,鲜勇.用遥测数据预报导弹落点的误差分析[J].遥测遥控,2001,22(3):39- 43.ZHANG Yi,SU Juan,XIAN Yong.Analysis of error in prediction of missile telemetry data[J].Remote Metering and Remote Control,2001,22(3):39- 43.(in Chinese)
[2]高策,张淑梅,赵立荣,等.基于数值积分法的弹道导弹落点实时预测[J].计算机测量与控制,2012,20(2):404- 406.GAO Ce,ZH ANG Shumei,ZHAO Lirong,et al.Based on the numerical integration method of ballistic missile for real-time prediction[J].Computer Measurement and Control,2012,20(2):404- 406.(in Chinese)
[3]付梦印,邓志红,张继伟.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003.FU Mengyin,DENG Zhihong,ZHANG Jiwei.Kalman filtering theory and its application in navigation system[M].Beijing:Science Press,2003.(in Chinese)
[4]徐明友.现代外弹道学[M].北京:兵器工业出版社,1999:215- 228.XU Mingyou.Modern exterior ballistics[M].Beijing:The Publishing House of Ordnance Industry,1999:215- 228.(in Chinese)
[5]唐泽圣,周嘉玉,李新友.计算机图形学基础[M].北京:清华大学出版社,1994:115- 132.TANG Zesheng,ZHOU Jiayu,LI Xinyou.Computer graphics basis[M].Beijing:Tsinghua University Press,1994:115- 132.(in Chinese)
[6]朱春香.视景仿真技术的研究与实现[D].南京:南京理工大学,2004.ZHU Chunxiang.Research and implementation of visual simulation technology[D].Nanjing:Nanjing University of Science and Technology,2004.(in Chinese)
[7]吴家铸,党岗,刘华峰,等.视景仿真技术及应用[M].西安:西安电子科技大学出版社,2001:82- 123.WU Jiazhu,DANG Gang,LIU Huafeng,et al.Visual simulation technology and its application[M].Xi'an:Xi'an Electronic and Science University Press,2001:82- 123.(in Chinese)
[8]郭文普,孙继银.视景生成中的几个关键技术[J].系统仿真学报,2001,13(增刊2):233- 234.GUO Wenpu,SUN Jiyin.Several key techniques of visual generation[J].Journal of System Simulation,2001,13(sup2):233- 234.(in Chinese)
[9]北京国遥新天地信息技术有限公司.EV-Globe SDK二次开发教程[M].2010.Beijing State Remote Information Technology Co,Ltd.EV-Globe SDK two development guide[M].Beijing:Beijing State Remote Information Technology Co,Ltd.2010.(in Chinese)
The Applieation and System Development of Visual Simulation Teehnology for Range Test
CHEN Guoli,WEI Maozhou,LI Bo,MI Zhonghe
(China Baicheng Weapon Test Center,Baicheng 137001,Jilin,China)
computer simulation;visual simulation;the range test;GIS;3D simulation display
TP391.9
A
1673-6524(2015)04-0039-06
2015- 02- 09;
2015- 06- 13
陈国利(1974-),男,硕士,主要从事靶场试验与信息化技术研究。E-mail:glch88@126.com
Abstraet:It applies the technology of visual simulation to the range test in the process of plotting,test equipment deployment and trajectory real-time display,which is of great significance for the visualization experiment.In response to the display requirement of test command in the range test,the researcher studied the real time data processing technique and presented a fast fusion algorithm for horizontal comparison,which greatly reduces the amount of computation.The Kalman filter that improves the prediction accuracy of impact point is used to predict the impact point coordinates,according to the system model and the current measurement information.An analysis is made of the relationship between the levels of the equipment model as well as the action control method of complex weapon equipment model mechanisms.The 3D simulation display platform is constructed by using EV-globe SDK module.
