可处理多普勒量测的最佳线性无偏估计算法
2015-07-12炜李丹姜礼平金裕红
王 炜李 丹姜礼平金裕红
①(海军工程大学理学院 武汉 430033)
②(武汉理工大学理学院 武汉 430070)
可处理多普勒量测的最佳线性无偏估计算法
王 炜①李 丹*②姜礼平①金裕红①
①(海军工程大学理学院 武汉 430033)
②(武汉理工大学理学院 武汉 430070)
基于目标位置量测的一些量测转换方法已被广泛使用在目标跟踪应用中,使得卡尔曼滤波器得以在直角坐标系中应用。但是,这些量测转换方法有一些会导致估计性能恶化的根本缺陷。事实上,除了位置量测外,理论计算和实践已经证明,包含目标速度信息的多普勒量测具有有效提高目标状态估计精度的潜力。该文在直角坐标系下提出一种可使用转换多普勒量测(即距离量测与多普勒量测的乘积)的滤波器。从理论上讲,它是在最佳线性无偏估计准则下的最优线性无偏滤波器,并且避免了量测转换方法的根本缺陷。通过将近似处理后的新型最优线性滤波器与目前4种流行的方法进行仿真比较,验证了所提出的滤波器的优越性。
目标跟踪;多普勒量测;最佳线性无偏估计;量测转换
1 引言
在主动雷达跟踪系统中,目标运动模型通常在直角坐标系中建立,而雷达量测一般是在极/球坐标系中得到的。这样,目标跟踪问题就成为一个非线性估计问题。解决该问题一般有两类方法。一类是在混合坐标系下跟踪目标,主要的方法为扩展卡尔曼滤波器(Extented Kalman Filter, EKF)、二阶EKF和无迹卡尔曼滤波器(Unscented Kalman Filter, UKF)等。EKF对于高非线性问题常会导致滤波结果发散。无迹变换(Unscented Tranform, UT)在雷达估计问题中本质上能捕捉到量测转换偏差,但是不能去消除偏差,所以导致基于无偏量测转换(Unbiased Converted Measurement, UCM)和基于UT的卡尔曼滤波仿真估计结果是近乎相同的[1,2]。另一类方法是量测转换[3]卡尔曼滤波(Converted Measurement Kalman Filter, CMKF)算法。由于极/球坐标到直角坐标的转换关系是很明确的,所以这种专门设计的滤波方法可能会在实际应用中完成得更好些。“量测转换”方法主要包含去偏量测转换(Debiased Converted Measurement, DCM)[4]和UCM[5]两类方法。最近,文献[2]总结以往提出的量测转换方法的优缺点后,提出了去相关无偏量测转换(Decorrelated Unbiased Converted Measurement, DUCM)方法。DUCM的估计性能优于前面的几种量测转换方法,且其性能与一种最佳线性无偏估计(Best Linear Unbiased Estimation, BLUE)算法[6]相当。然而,量测转换方法固有的缺陷导致基于量测转换的卡尔曼滤波估计无论如何也不是最优的。实际上,卡尔曼滤波器是基于BLUE准则提出的。文献[6]基于BLUE 准则,提出一种直接使用极/球坐标系中的雷达量测的近似BLUE滤波器,这种方法直接使用BLUE准则对目标的运动状态进行估计,不仅克服了量测转换方法的缺陷,而且在估计误差和滤波器的可靠性方面都明显超过了量测转换方法。
前面讲到的雷达滤波方法仅使用了雷达的位置量测。事实上,充分利用多普勒量测可以有效地提高目标状态的估计精度[7−9],即使在量测源不确定条件下亦是如此[10]。早先通常假设斜距、角度和多普勒量测的量测误差是统计独立的,但最近的研究表明:斜距和多普勒量测的量测误差对于某些雷达波形而言是统计相关的[7,8]。为减小多普勒量测模型在直角坐标系下的强非线性,学者们通过将斜距和多普勒量测相乘构造了伪量测。基于此,为了充分利用雷达的多普勒量测信息,文献[11]将DCM卡尔曼滤波算法推广到包含多普勒量测且斜距误差和多普勒误差相关的情形。文献[12]基于修正的无偏量测转换(Modified Unbiased Converted Measurement, MUCM)提出了序贯量测转换卡尔曼滤波方法。文献[13]没有使用这一乘积,而是直接基于多普勒量测方程,使用UT变换进行序贯卡尔曼滤波。文献[14]首先使用极坐标位置量测,并经过量测转换卡尔曼滤波估计出目标位置状态估计,然后通过使用伪量测(又称转换多普勒量测),并经过卡尔曼滤波估计出转换多普勒伪状态估计,最后使用最小方差估计准则组合多普勒伪状态估计和目标位置状态估计,并得出最终估计结果。该算法的性能优于文献[3,5, 14,15]所提出的算法。
本文基于BLUE准则,推导出一种直接使用极坐标系中的雷达位置量测和多普勒量测的近似最佳线性无偏估计滤波器。该方法可以直接使用极坐标下的雷达量测对目标的直角坐标运动状态进行估计,在估计误差和滤波器的可靠性方面都明显超过了量测转换方法。
2 递推BLUE滤波器
令Zk和Xk是k时刻的量测和目标状态,并且令Zk代表到k时刻为止的所有历史量测的集合。对所有的没有任何特定假设的Zk和Xk,无论Zk和Xk是否是线性或非线性关系,BLUE滤波器E*[X|Z]总是有准递推形式:
考虑包含线性运动方程和极坐标量测方程的随机系统Xk=Fk−1Xk−1+Gk−1wk−1,Zk=h (Xk,vk),其中,{wk}和{vk}是过程噪声和量测噪声序列,都与初始状态x0独立。Fk−1是转移矩阵,且h(Xk,vk)是量测函数。首先,BLUE状态预测能够精确地运行如下:
3 极坐标系下的跟踪算法
对于任意时刻k,相对于真实斜距r,方位角θ和多普勒信息r.,极坐标系下的斜距量测,方位角量测和多普勒量测可记为=r+, k。其中,,和为相应的加性量测噪声,都是零均值的高斯白噪声序列,分别具有标准差σr,σθ和σr.。r~k和r~.k分别与θ~k相互独立,并且r~k,θ~k和r~.k都独立于r,θ和r.。r~k和r~.k是相关的,相关系数为ρ。
首先,将极坐标系下的位置量测转换到直角坐标系后产生:
然后,为了减弱多普勒量测和目标运动之间的强非线性程度,构造了伪量测方程:

这样,跟踪系统具有非线性量测方程:


状态预测误差X~k和量测预测误差Z~k的互协方差为(推导略)

其中,s13=s31,s23=s32,s12=s21,

有关s11,s22,s12的计算公式可参见文献[6]。由于存在不能精确计算的条件期望E[⋅],所以sij(i,j= 1,2,3)不能精确地给出闭式解,但是可以高精度地将它们近似计算出来。文献[6]已经给出了近似计算sij(i,j=1,2)中的期望值E[⋅]的计算公式。在下一节中我们将使用泰勒级数展开法将其他的sij中的期望E[⋅]做出近似分析。
下面总结出了本文所提新算法(简记为BLUEPM)在一个循环周期内的完整滤波过程:第1步,使用式(4)~式(6)计算出状态预测更新量和,以及预测量测量;第2步,再使用式(4)~式(6),式(7)和式(8)计算出状态量测更新量k和Pk;第3步,进入下一轮循环。
4 预测量测误差协方差阵中期望值的近似求法
由于sij(i,j=1,2,3)中涉及的期望E[⋅]要么没有解析解,要么表达复杂。所以可以先对需要求期望的函数进行泰勒级数展开,并取前若干项去近似该函数,然后再求近似表达式的期望。关于sij(i,j=1,2)的近似合理性,在文献[6]中已经分析过。我们重点来分析si3(i=1,2,3)的近似计算。此处si3= s3i。但限于篇幅,此处只给出了si3(i=1,2,3)中期望E[()2|Zk−1]的二阶泰勒近似展开式,而省略了期望E[xk/rk|Zk−1]和E[yk/rk|Zk−1]的二阶近似展开式。
对许多目标跟踪应用而言,上述对分量si3(i= 1,2,3)的近似是十分精确的。这一论断可以由仿真结果进一步验证。我们将看到,在所有仿真结果中,BLUEPM算法的估计误差较其它滤波算法而言总是最小的。
为了保证BLUEPM算法的数值稳定性,在执行该算法时,没有将上述E[()2|Zk−1], E[xk/ rk|Zk−1]和E[yk/rk|Zk−1]的二阶泰勒展开公式,进一步截断为一阶公式,否则Sk会失去正定性,从而出现数值不稳定现象(这一结论在仿真中已经得到验证)。尽管BLUEPM算法直接使用了这些看似复杂的二阶泰勒展开公式,但是通过仿真与其它4个算法相比较后,发现BLUEPM算法的时间复杂度仍然还是很小的。
5 仿真结果
本节将通过仿真和性能比较来验证本文算法BLUEPM的有效性。假设目标运动近似为匀速运动。目标初始位置为(10 km,10 km),运动速度为20 m/s(x方向和y方向的速度分量为10 m/s和103 m/s)。在对目标运动的仿真中,使用连续离散化白噪声加速度模型(Nearly Constant Velocity, NCV)定义目标运动方程,采样周期为1 s,过程噪声为零均值的高斯白噪声,且过程噪声标准差为0.001 m/s2。采用一部固定雷达对目标进行跟踪,其直角坐标位置为(0 km,0 km),采样周期为1 s,雷达的量测量为斜距、方位角和多普勒量测,量测噪声为零均值的高斯白噪声,斜距、方位角和多普勒量测的标准差分别记为σr,σθ和σr.。斜距和多普勒量测之间的相关系数记为ρ。
基于引言部分对不同量测转换方法的研究结果,我们选择了4种常用且跟踪性能优良的量测转换算法(分别记为MC[5], CPMKF[3], DCMD[13]和SFCMKP[11]),与BLUEPM算法进行仿真比较。MC算法和CPMKF算法仅使用了雷达的距离和方位角量测,而为提高目标状态估计精度,DCMD算法,SFCMKP算法和BLUEPM算法还用到了多普勒量测信息。所有算法在仿真中使用了相同的目标初始状态估计及其估计误差协方差矩阵。依照斜距和多普勒量测之间的相关系数的不同取值,仿真实验共被分为3大类,每一类中又包含3种不同场景,所以总共有9种仿真场景。每种仿真场景的仿真次数为50次,每次仿真时长为200 s。表1给出了所有不同仿真场景的量测噪声参数设置值。通过对量测噪声参数设置值从大到小取不同值,进行不同组合,形成不同仿真场景,以便充分验证BLUEPM算法的有效性和优越性。
图1~图9分别给出了在不同仿真场景下这5种估计算法的均方根误差(Root Mean Square Error, RMSE)比较结果。图1~图3对应相关系数ρ=0时的RMSEs。图4~图6对应相关系数0.9 ρ=−时的RMSEs。最后,图7~图9对应相关系数ρ=0.9时的RMSEs。为便于显示,图中每个时间步长h=4 s。
从仿真结果图可以看出,5种算法可以按照估计性能分为两类,I类算法为SFCMKP和BLUEPM, II类算法为MC, CPMKF和DCMD。I类算法明显比II类算法能够更加快速稳定地达到更精确的稳态估计值,这说明加入多普勒量测信息确实能够提高目标状态估计精度。SFCMKP算法和BLUEPM算法的估计性能差别并不太明显。从几乎所有的仿真图中可看出,自40 s以后,BLUEPM算法的RMSE要低于SFCMKP算法,说明BLUEPM算法能够得到精度更高的目标状态估计值。从图7和图8可以看到,SFCMKP算法在50 s附近出现了野值,而
BLUEPM算法没有出现。尽管本文未在仿真中对文献[14,15]所提出基于UT变换的算法进行比较,但是从文献[11]已经知道,SFCMKP算法的估计性能要好于文献[14,15]的算法,所以可以推测:BLUEPM算法的估计性能也应该好于文献[14,15]的算法。可以看出,MC算法和CPMKF算法性能相当,它们的RMSEs也没有出现大的波动,而DCMD算法的RMSEs一开始便出现了大的波动,但随着时间的推移逐渐减小,估计结果逐渐稳定在MC算法和CPMKF算法的状态估计值处。实际上,可以计算得到在所有算法的RMSEs时间平均值中,DCMD算法要比MC算法和CPMKF算法更小。图10给出仿真中的5种算法的平均单次执行时间。BLUEPM算法的执行时间为0.087 s, SFCMKP算法的执行时间为1.524 s, DCMD算法的执行时间为1.033 s, CPMKF算法的执行时间为0.414 s, MC算法的执行时间为0.761 s。可以看出,BLUEPM算法的执行时间最短,几乎为SFCMKP算法的1/20。DCMD算法的执行时间几乎是CPMKF算法的2倍。总而言之,BLUEPM算法是执行时间最短,跟踪精度最好的算法,SFCMKP算法次之,而MC算法,CPMKF算法和DCMD算法的跟踪精度相当,并劣于BLUEPM算法和SFCMKP算法。
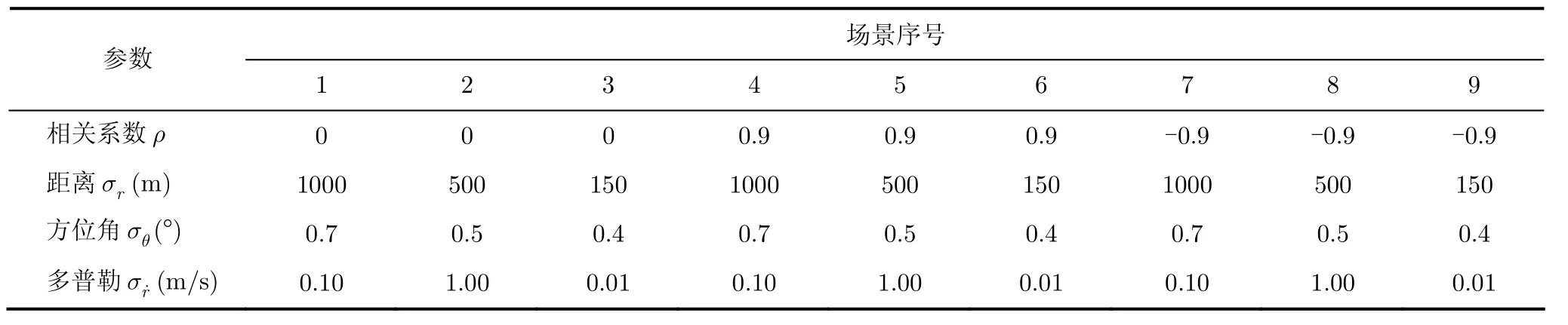
表1 仿真中9种不同场景的参数设置表

图1 场景1对应的RMSEs
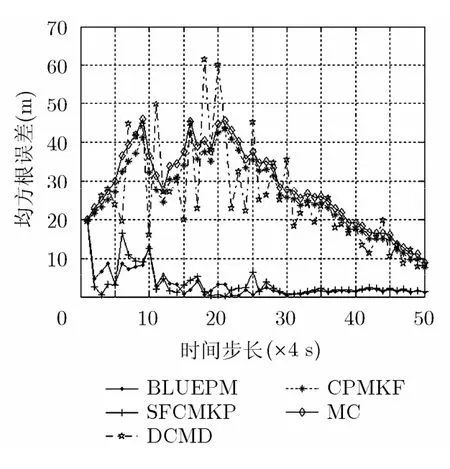
图2 场景2对应的RMSEs
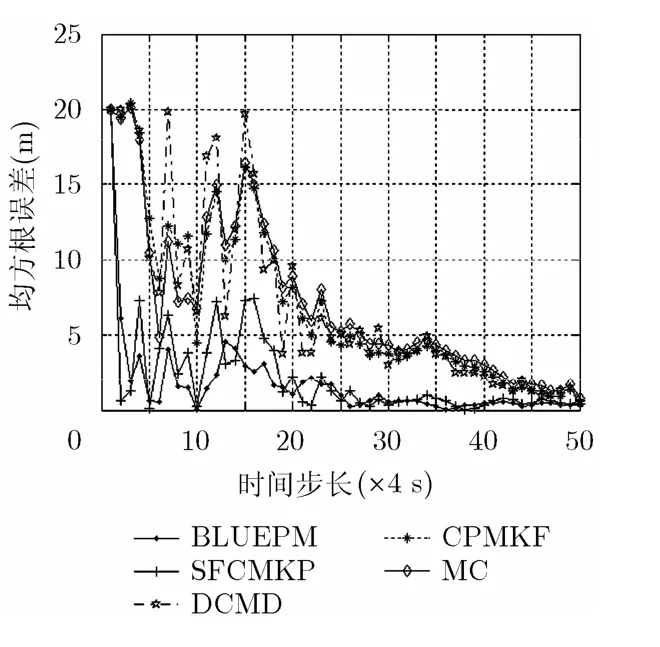
图3 场景3对应的RMSEs
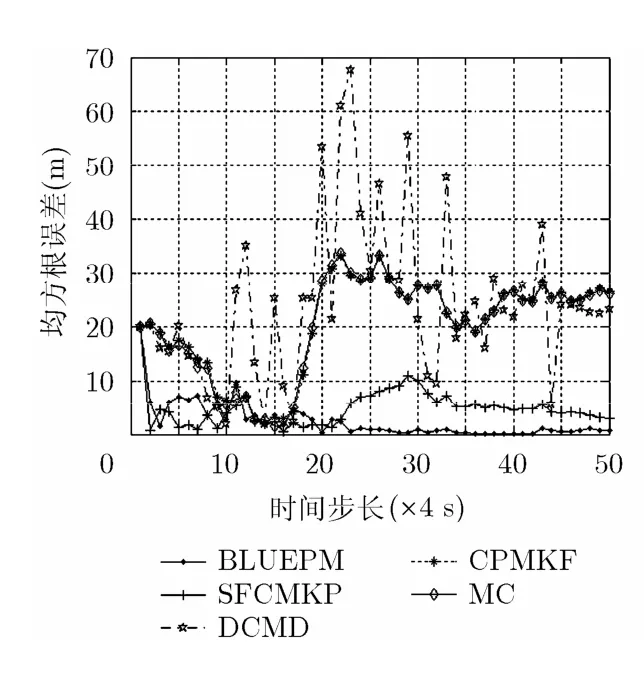
图4 场景4对应的RMSEs
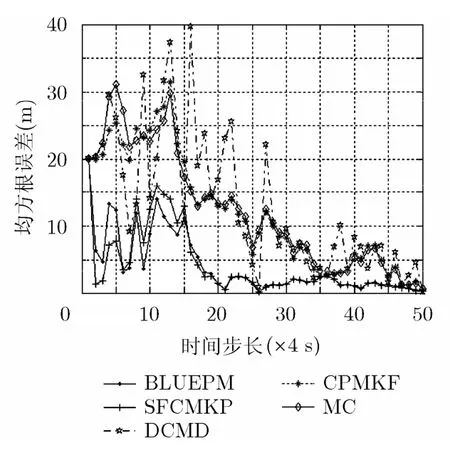
图5 场景5对应的RMSEs
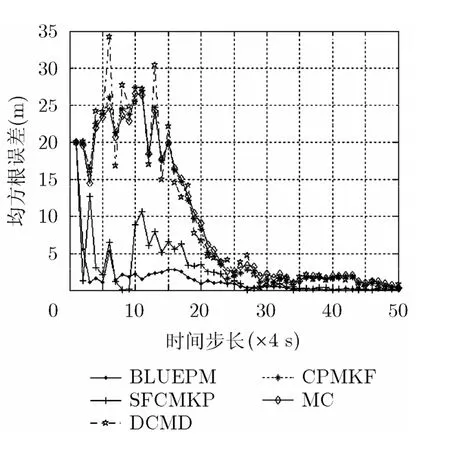
图6 场景6对应的RMSEs
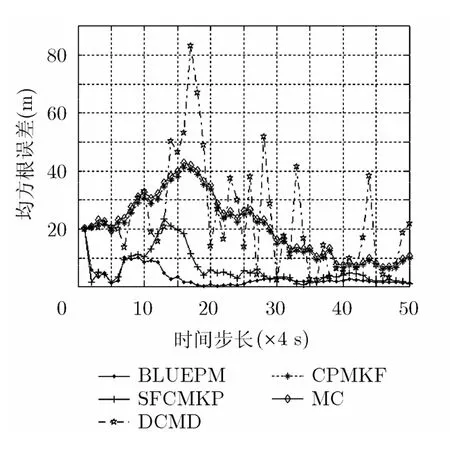
图7 场景7对应 的RMSEs
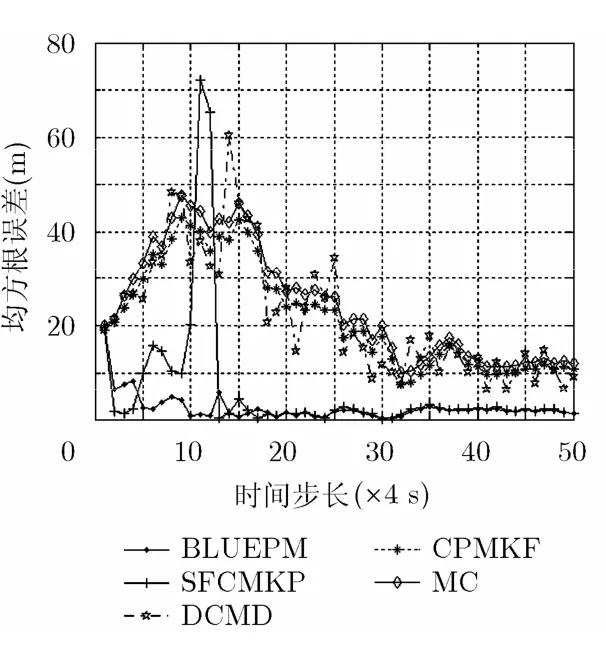
图8 场景8对应的RMSEs
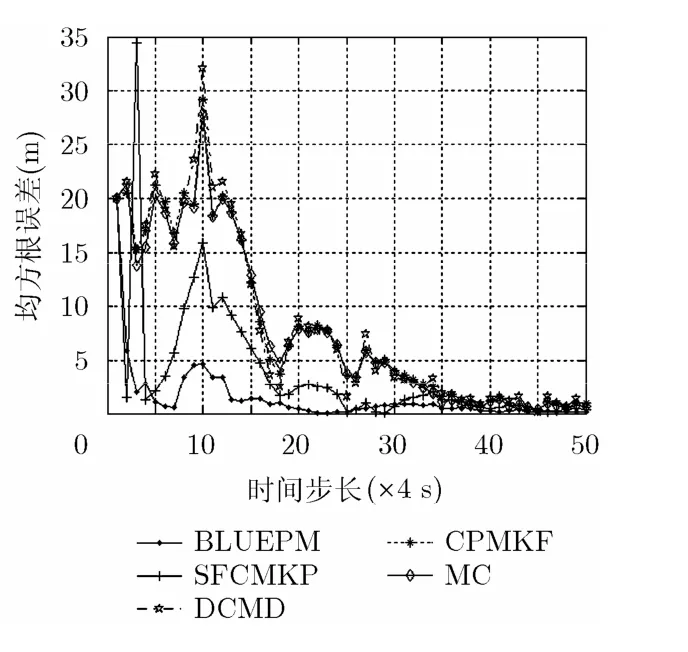
图9 场景9对应的RMSEs
6 结论
本文讨论了同时使用位置量测和多普勒量测进行目标跟踪的问题,并且提出一种可使用转换多普勒量测(即距离量测与多普勒量测的乘积)的滤波器。从理论上讲,该滤波器是在BLUE准则下的最优线性滤波器,可以完全在直角坐标系中运行,并且避免了量测转换方法的根本缺陷。通过仿真实验,将本文算法与几种流行方法的跟踪性能进行了比较和验证。仿真实验使用了具有不同量测误差和不同相关系数(即距离量测与多普勒量测之间的相关系数)组合的多个仿真场景。依照估计误差和算法执行时间指标,在所有仿真场景中,新算法明显优于其他几种流行方法。新算法能够提供更加精确的估计结果,执行时间更短。由于本文算法放弃了卡尔曼滤波器框架,转而直接使用最佳线性无偏估计准则,所以它在没有增加算法复杂度的前提下,获得了更好的性能。
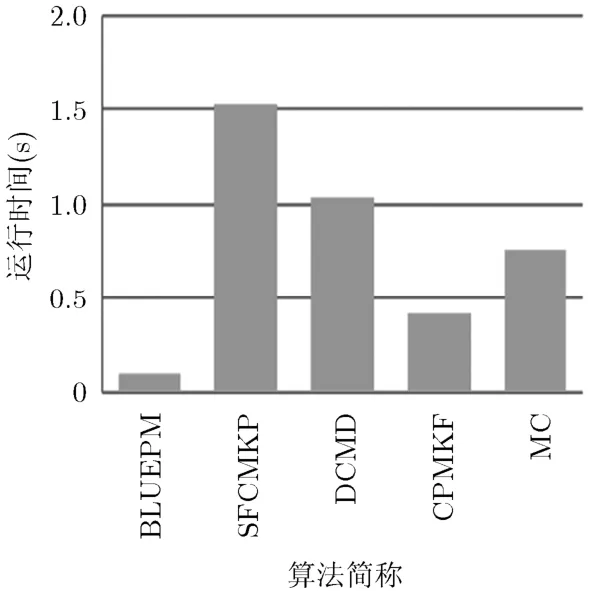
图10 5种算法的平均单次执行时间比较
[1] Bordonaro S V, Willett P, and Bar-Shalom Y. Performance analysis of the converted range rate and position linear Kalman filter[C]. 2013 Asilomar Conference on Systems and Computers, Signals, California, USA, 2013, 1751-1755.
[2] Bordonaro S V, Willett P, and Bar-Shalom Y. Decorrelated, unbiased converted measurement kalman filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1431-1442.
[3] Lerro D and Bar-Shalom Y. Tracking with debiased consistent converted measurements vs. EKF[J]. IEEE Transactions on Aerospace and Electronic Systems, 1993, 29(3): 1015-1022.
[4] Mo Long-bin, Song Xiao-quan, and Bar-Shalom Y. Unbiased converted measurements for tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(3): 1023-1027. [5] Duan Zhan-sheng, Han Chong-zhao, and Li Xiao-rong. Comments on unbiased converted measurements for tracking [J]. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(4): 1374-1377.
[6] Zhao Zhan-lue, Li Xiao-rong, and Jilkov V P. Best linear unbiased filtering with nonlinear measurements for target tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(4): 1324-1336.
[7] Bar-Shalom Y. Negative correlation and optimal tracking with Doppler measurements[J]. IEEE Transactions on Aerospace and Electronic Systems, 2001, 37(3): 1117-1120.
[8] Smith M A. On Doppler measurements for tracking[C]. 2008 International Conference on Radar, Australia, 2008: 513-518.
[9] Bar-Shalom Y, Willett P, and Tian X. Tracking and Data Fusion: a Handbook of Algorithms[M]. Storrs, CT: YBS Publishing, 2011: 211-286.
[10] Musicki D, Song T L, and Lee H H. Correlated Dopplerassisted target tracking in clutter[J]. IET Radar, Sonar & Navigation, 2013, 7(1): 94-100.
[11] Duan Zhan-sheng, Li Xiao-rong, and Han Chong-zhao. Sequential nonlinear tracking filter with range-rate measurements in spherical coordinates[C]. 7th International Conference on Information Fusion, Stockholm, Sweden, 2004: 131-138.
[12] Jiao Lian-meng, Pan Quan, and Feng Xiao-xue. A nonlinear tracking algorithm with range-rate measurements based onunbiased measurement conversion[C]. 15th International Conference on Information Fusion, Singapore, 2012: 1400-1405.
[13] Lei Ming and Han Chong-zhao. Sequential nonlinear tracking using UKF and raw range-rate measurements[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(1): 239-250.
[14] Zhou Gong-jian, Michel P, and Thiagalingan K. Statically fused converted position and Doppler measurement Kalman filters[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 300-316.
[15] Duan Zhan-sheng, Li Xiao-rong, and Han Chong-zhao. Sequential unscented Kalman filter for radar target tracking with range rate measurements[C]. 8th International Conference on Information Fusion, Philadelphia, PA, USA, 2005, 1: 130-137.
王 炜: 男,1975年生,副教授,研究方向为信息融合、信号处理与控制.
李 丹: 女,1980年生,讲师,研究方向为统计学、信息处理.
姜礼平: 男,1961年生,教授,研究方向为信息融合、作战仿真.
金裕红: 男,1968年生,副教授,研究方向为算法理论及其应用.
The Best Linear Unbiased Estimation Algorithm with Doppler Measurements
Wang Wei①Li Dan②Jiang Li-ping①Jin Yu-hong①
①(School of Science, Naval University of Engineering, Wuhan 430033, China)
②(School of Science, Wuhan University of Science and Technology, Wuhan 430070, China)
A number of measurement-conversion techniques, which are based on position measurements, are widely used in tracking applications, so that the Kalman filter can be applied to the Cartesian coordinates. However, they have fundamental limitations resulting in filtering performance degradation. In fact, in addition to position measurements, the Doppler measurement containing information of target velocity has the potential capability of improving the tracking performance. A filter is proposed which can use converted Doppler measurements (i.e. the product of the range measurements and Doppler measurements) in the Cartesian coordinates. The novel filter is theoretically optimal in the rule of the best linear unbiased estimation among all linear unbiased filters in the Cartesian coordinates, and it is free from the fundamental limitations of the measurement-conversion approach. Based on simulation experiments, an approximate, recursive implementation of the novel filter is compared with those obtained by four state-of-the-art conversion techniques recently. Simulation results demonstrate the effectiveness of the proposed filter.
Target tracking; Doppler measurement; Best linear unbiased estimation; Converted measurement
TP391
: A
:1009-5896(2015)06-1336-07
10.11999/JEIT141113
2014-08-21收到,2014-12-22改回
国家自然科学基金(51307128, 60873032),中央高校基本科研业务费专项资金(2012-Ia-045),湖北省自然科学基金(2013CFB437)和海工大基金(HJGSK2014G121)资助课题
*通信作者:李丹 lidan0520@163.com