基于负载转矩观测的PMSM直接转矩反步控制
2015-07-11宁博文程善美秦忆
宁博文,程善美,秦忆
(华中科技大学自动化学院,湖北武汉430074)
1 引言
永磁同步电机具有高效率、高转矩和高功率密度的优点,在中、小功率工业应用场合得到了广泛的运用[1]。本质上永磁同步电机是一个非线性、多变量、强耦合的控制对象,传统的PI控制器受参数影响较大,难以达到高性能的控制目标。为提高永磁同步电机控制性能,非线性控制方法正逐步在电机控制中得到应用。近年来,反步控制作为一种新型的非线性控制方法,在电力传动领域受到了广泛的关注[2-4]。
在系统实际运行过程中,负载转矩的扰动会对系统性能造成影响,而实际转矩不易直接测量,因此需要设计观测器对其进行观测[5-8]。文献[5]提出了基于扩展Kalman 滤波器的转矩观测方法,在观测转子位置、速度的基础上实现了对转矩的观测。文献[6]用滑模观测器观测负载转矩,并作为补偿量对扰动进行前馈补偿,提升了系统的鲁棒性。文献[7]采用自适应反步控制实现负载转矩的实时估计,保证了系统的快速跟踪。文献[8]将反步法与滑模控制器相结合,并采用扩张观测器观测转矩变化,但是观测器设计较为复杂。
针对上述问题,考虑到电机结构非线性的特点,本文从转矩和磁链2个控制量考虑,提出了基于反步法的永磁同步电机直接转矩控制系统。对输出控制电压采用SVPWM 调制,可以使逆变器开关频率保持恒定,并有效减小电流和转矩脉动。对于负载扰动的问题,以电机转速和负载转矩为观测对象,设计了负载转矩Luenberger 状态观测器以减小扰动对系统的影响,并通过Lyapunov 稳定性方法得到的线性矩阵不等式求解反馈增益,保证了观测器的稳定性。仿真结果验证了本文提出方法的正确性和可行性。
2 永磁同步电机数学模型
为简化分析,假设磁路不饱和、气隙磁场呈正弦分布,不计涡流和磁滞损耗。以表贴式永磁同步电机为控制对象,即交直轴电感相等,Ld=Lq=L。选取iα,iβ为状态变量,结合电机机械运动方程,得到永磁同步电机在αβ坐标系下状态方程为[9]

其中Eα,Eβ为相反电动势
定子磁链方程可以表示为

αβ 坐标系下转矩方程可以表示为

式中:uα,uβ为αβ轴定子电压;iα,iβ为αβ轴定子电流;Rs为定子电阻;L 为定子电感;ωre为转子电角速度;Ψf为永磁磁链;θ为转子电角度;Ψα,Ψβ为αβ轴磁链;np为极对数;B 为摩擦系数;J 为转动惯量;TL为负载转矩;Te为电磁转矩;Ψ为定子磁链幅值的平方。
3 非线性反步控制器设计
反步法控制器的设计分为2个部分:首先,对速度环进行设计,得到保证速度稳定跟踪的转矩虚拟控制律;然后,对转矩和磁链子系统进行设计,最终得到具有鲁棒性的输出控制电压实际控制律。
定义速度误差

式中:ω为电机机械角速度,ω=ωre/np。
对跟踪误差进行求导,可以得到:

为了使速度跟踪误差趋近于零,定义如下Lyapunov函数:

对式(7)求导数可得:


从转矩和磁链2 个控制量考虑,为了实现永磁同步电机的转矩和磁链跟踪控制,定义如下转矩和磁链误差:

式中:Ψ*为额定磁链的平方。
由eT,eψ可以组成新的系统,对式(10)求导,可得动态误差:

对于系统构造Lyapunov函数

对式(13)求导数:


式中:k2>0,k3>0。
将控制式(15)、式(16)带入式(14),可得:

则控制式(15)、式(16)使得永磁同步电机系统可以达到速度的跟踪响应,并且能使转矩和磁链达到跟踪的效果,使系统具有良好的响应能力。
4 负载转矩观测器
由选取的虚拟转矩控制式(9)可以看出,需要知道负载转矩TL的大小。负载转矩的变化会造成转速的波动,而TL作为未知量不易测量,本文通过设计负载转矩Luenberger状态观测器来观测负载转矩的变化。
由于控制周期较快,在每个控制周期内负载转矩为基本不变,即,以电机转速和负载转矩作为观测对象,可以建立状态方程为

其中

上述状态方程中(A C)可观测,满足现代控制理论中状态观测器极点可以任意配置的充要条件,可以构造如下转矩Luenberger观测器

式中:上标“^”表示估计值;G 为反馈增益矩阵,G=[g1g2]T。
观测器误差为

定义如下Lyapunov函数

式中:P为正定的实对称矩阵。V(e)沿任一轨迹的时间导数为

反馈增益G=P-1Y,根据Lyapunov 稳定性理论,状态观测器渐近稳定的条件是存在P 使线性矩阵不等式成立:

为求解反馈增益矩阵G,使V(e)满足α稳定性[11],即以下线性矩阵不等式成立:

式中:α>0。
此时观测器误差e 的收敛速度由α决定,根据α取值可以求出反馈增益矩阵G,并保证了系统的稳定性。通过设计观测器求出负载转矩TL,能够使系统在存在负载扰动时快速响应,使系统速度保持稳定。负载转矩状态观测器模型框图如图1所示。

图1 负载转矩状态观测器原理图Fig.1 Schematic diagram of the load torque observer
5 系统仿真分析
为了验证本文所设计的反步控制器的有效性和负载转矩观测器的正确性,在Matlab环境下进行了仿真。永磁同步电机具体参数为:转动惯量J=0.000 828 kg·m2,永磁体磁链Ψf=0.094 28 Wb,定子电阻Rs=0.779 Ω,定子电感L=0.003 026 H,极对数np=4,额定转矩TN=4 N·m。控制系统总体结构框图如图2所示。

图2 基于转矩观测的PMSM控制系统框图Fig.2 The control block diagram of PMSM system based on torque observer
线性矩阵不等式(24)中α=2 000,具体求解可以利用Matlab中的LMI工具箱,求解得到的反馈矩阵

仿真波形如图3 和图4 所示。图3 为电机转速给定低速100 r/min 时的电机转速响应和负载转矩估计波形图;图4 为电机转速给定高速1 500 r/min 时的电机转速响应和负载转矩估计波形图。电机空载启动,为了验证负载转矩观测器的效果,在系统稳态运行过程中,改变负载转矩值,在0.05 s 时改变负载为2 N·m,在0.01 s 时变为4 N·m。从仿真波形图中可以看出,转速响应快速,在负载出现变化时转速波动小,且能很快恢复到稳态值,转矩状态观测器可以快速估计出负载转矩的大小。

图3 低速运行时速度与负载转矩估计响应曲线Fig.3 Response of speed and estimation of the load torque at low speed
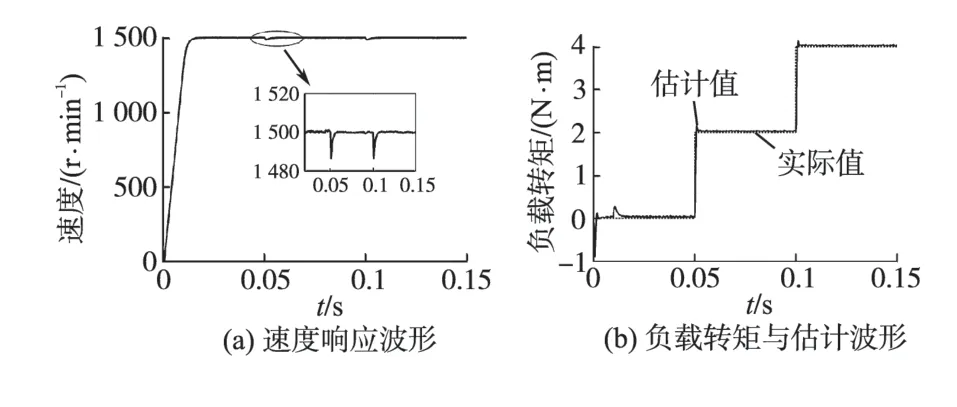
图4 高速运行时速度与负载转矩估计响应曲线Fig.4 Response of speed and estimation of the load torque at high speed
6 结论
本文从减小传统直接转矩控制转矩脉动出发,考虑到电机结构的非线性,提出了一种基于反步法的直接转矩控制方案。
该方案对输出控制电压采用SVPWM 调制,使得逆变器开关频率保持恒定并且能有效减小电流和转矩脉动。对于负载扰动问题,设计了负载转矩观测器,可以准确估计负载转矩值以减小扰动对系统的影响。仿真验证了系统的有效性和可行性。
[1]李永东,朱昊.永磁同步电机无速度传感器控制综述[J].电气传动,2009,39(9):3-10.
[2]张兴华.永磁同步电机的模型参考自适应反步控制[J].控制与决策,2008,23(3):341-345.
[3]Uddin M N,Lau J. Adaptive-backstepping-based Design of a Nonlinear Position Controller for an IPMSM Servo Drive[J].Canadian Journal of Electrical and Computer Engineering,2007,32(2):97-102.
[4]Hu J,Xu Y,Zou J. Design and Implementation of Adaptive Backstepping Speed Control for Permanent Magnet Synchronous Motor[C]//The Sixth World Congress on Intelligent Control and Automation,Dalian,2006:2011-2015.
[5]郑泽东,李永东,Maurice Fadel,等.基于扩展Kalman 滤波器的PMSM 高性能控制系统[J]. 电工技术学报,2007,22(10):18-23.
[6]Changfan Z,Lin J,Jing H.Load Torque Observer Based Sliding Mode Control Method for Permanent Magnet Synchronous Motor[C]//2013 25th Chinese Control and Decision Conference.Guiyang:IEEE,2013:550-555.
[7]刘栋良,王家军,崔丽丽.永磁同步电机参数自适应调速控制[J].电工技术学报,2011,26(8):159-165.
[8]王礼鹏,张化光,刘秀翀,等. 基于扩张状态观测器的SPMSM调速系统的滑模变结构反步控制[J].控制与决策,2011,26(4):553-557.
[9]唐小琦,白玉成,陈吉红.永磁同步电机高性能电流解耦控制的研究[J].电气传动,2009,39(10):18-22.
[10]Marino R.Nonlinear Control Design:Geometric,Adaptive and Robust[M].New Jersey:Prentice Hall International,1995.
[11]Han H C.LMI-based Nonlinear Fuzzy Observer-controller Design for Uncertain MIMO Nonlinear Systems[J]. IEEE Transactions on Fuzzy Systems,2007,15(5):956-971.
