异轴式坦克减振器的联动杠杆机构对阻尼特性的影响
2015-06-24徐国英姚新民张炳喜
徐国英, 王 闯, 姚新民, 王 涛, 张炳喜
(装甲兵工程学院机械工程系, 北京 100072)
异轴式坦克减振器的联动杠杆机构对阻尼特性的影响
徐国英, 王 闯, 姚新民, 王 涛, 张炳喜
(装甲兵工程学院机械工程系, 北京 100072)
从减小冲击车辆的角度,初步分析了当负重轮以较高速度抬升时车辆对减振器阻尼特性的总体要求。根据液力式和摩擦式 2 种减振器的阻尼特性,针对2种车型的减振器联动杠杆机构,用图解法分别分析了负重轮在相同摆动速度和相同受力条件下,经联动杠杆作用后减振器摆臂运动速度和受力的变化趋势,并据此对这2种车型和2种形式的减振器阻尼与车体阻尼需求的匹配情况进行了评述。结果表明:联动杠杆对减振器性能的发挥存在影响,所分析的2种车型的杆系和使用的减振器性能配合不够理想。
减振器;阻尼;联动杠杆;悬挂系统
减振器是坦克装甲车辆悬挂系统的耗能部件,用于消耗车辆行驶时由路面和驾驶所引起的振动能量。在安装位置上,与扭力轴使用同一个旋转轴心的减振器称为同轴式减振器(如豹II和M1坦克),其他称为异轴式减振器[1-3]。由于受车辆总体布局的限制,异轴式减振器的使用更为普遍。异轴安装时,减振器通常通过杠杆机构连接在平衡肘上,如图1所示,其中:连杆和减振器摆臂统称为联动杠杆机构。
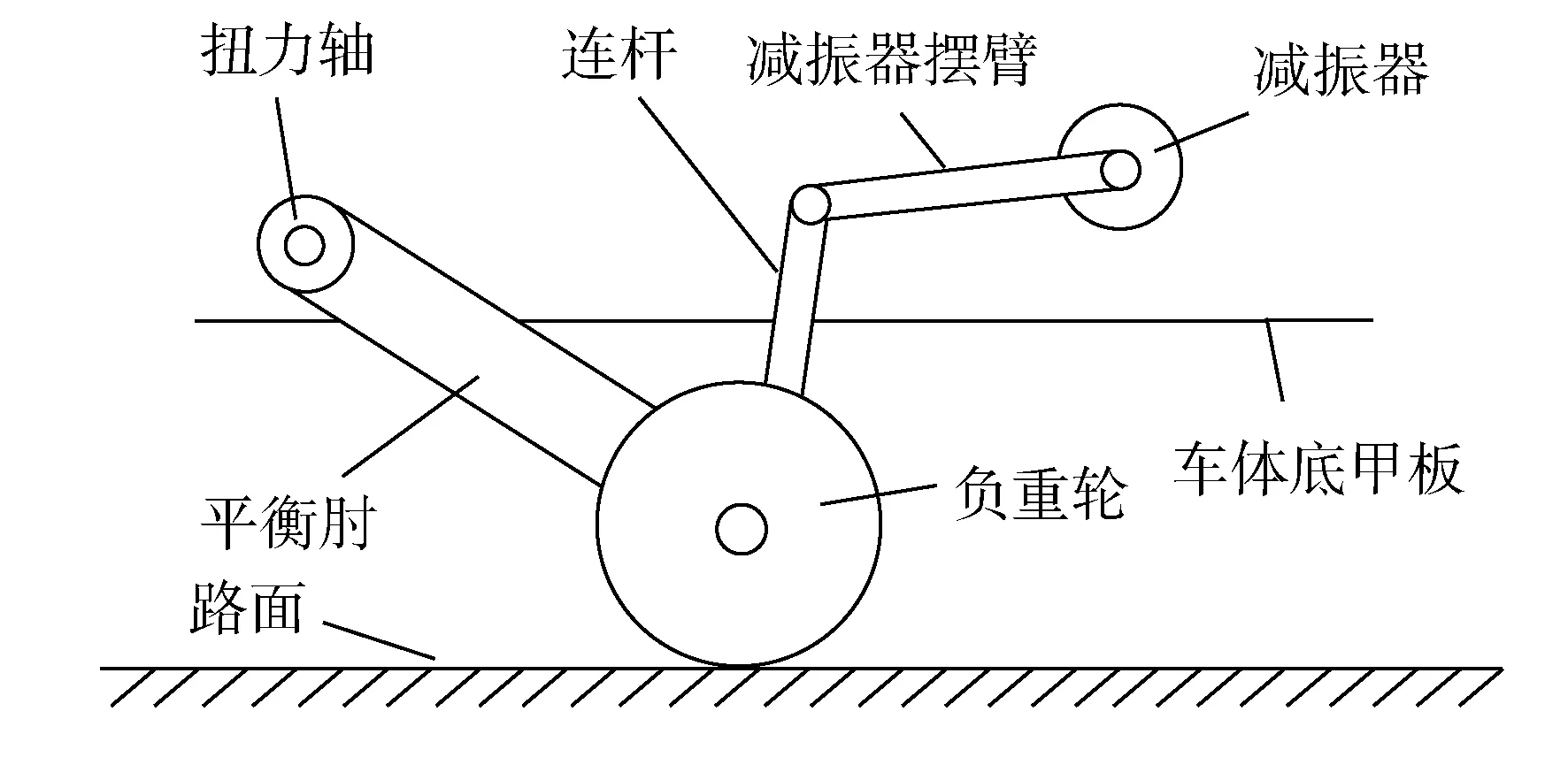
图1 异轴式减振器安装方式
车辆行驶时,受地面不平度和驾驶员驾驶动作的影响,负重轮相对于车体上下运动,带动平衡肘绕扭力轴中心摆动。铰接在平衡肘上的连杆带动减振器摆臂运动,从而使减振器产生阻尼而消耗能量。减振器的阻尼作用通过连杆反作用于平衡肘,影响车体的振动特性。现有研究多见于对联动杠杆机构本身[4]和减振器自身阻尼特性的独立分析,鲜见对二者的联合分析。为此,笔者以2种车型为例,分析负重轮抬升过程中联动杠杆机构对减振器阻尼特性的影响。
1 减振器的阻尼特性
减振器的阻尼特性与其构造及工作原理有关。目前,在坦克上独立使用的减振器内部主要工作部分呈圆形,由固定和活动2大部分构成,其中:活动部分和外部的摆臂固联在一起,工作时,外部摆臂带动内部的活动部分绕减振器轴心旋转,与固定部分发生相对运动而产生阻尼。
根据活动部分和固定部分的作用机理,减振器分为摩擦式和液力式2种,其阻尼特性也不同[3]。摩擦式减振器的活动部分和固定部分之间形成摩擦副,摆臂摆动时,摩擦副上的正压力发生变化,从而产生摩擦阻尼,其中:减振器摆臂从0位置开始摆动的角度越大,摩擦副上的正压力越大,产生的摩擦阻尼越大。液力式减振器的活动部分和固定部分之间形成含有工作液体的工作腔,摆臂摆动时,工作液体受压迫从高压腔流到低压腔,从而产生阻尼,其与液体的种类及流动速度、腔室间的间隙及通道等有关,即摆臂运动速度越快,高压腔的压力越大,液体的流动速度越快,阻尼也越大;反之,则阻尼越小。
减振器的阻尼特性是缓解车辆振动的基础,异轴安装时并不能直接用于分析,而是要通过联动杠杆折算到负重轮上才能反映其对车辆悬挂系统阻尼特性的贡献。
2 车辆对阻尼的需求
车辆低速行驶时,振动相对较小,对减振器的要求相对较低。车辆高速行驶或从较高的位置跌落、负重轮以较高的速度产生较大幅度的抬升时,需要减振器提供较大的阻尼,消耗弹性元件不能吸收的能量。从能量转换的角度来看,只要弹性元件吸收的能量和阻尼元件消耗的能量之和等于振动能量,振动就是无害的。
但从对车体产生的冲击力角度分析,阻尼施加的时机是有影响的。考虑到对车体的冲击仅发生在负重轮抬升时,因此,本文仅就负重轮的抬升过程进行分析。根据冲量定理可知:当负重轮受冲击抬升时,若扭力轴刚度小,则负重轮接受冲击的时间长,冲击力小,车体所受冲击也小;反之,则冲击力大。如果在负重轮抬升初期,减振器就提供较大的阻尼或迅速提供阻尼,则相当于增加了扭力轴的刚度,从而增大了冲击力。图2为车辆匀速通过障碍时,扭力轴在有、无阻尼介入时车体垂直方向所受的冲击载荷。

图2 车辆通过障碍时车体所受冲击载荷
由图2可以看出:有阻尼介入时,车体所受冲击较无阻尼时大。因此,阻尼较晚介入或由小变大有利于减小冲击力。
摩擦式减振器的阻尼随摆臂摆动幅度的增加而增大,其可等效为随负重轮的抬升阻尼逐渐增大,这与车体对阻尼的要求总体上保持一致。
液力式减振器的阻尼随摆臂摆动速度的增大而增大。假设其摆臂和负重轮直接相连。在负重轮抬升初期,由于扭力轴扭转的角度较小,所产生的负重轮抬升阻力矩较小,因此负重轮容易产生较高的抬升加速度,使速度迅速增大而产生较大阻尼,进而将较大的地面冲击力传递到车体。随着负重轮的抬升,扭力轴扭转角度变大,扭转阻力矩增大,负重轮抬升速度变慢,减振器提供的阻尼随之变小。这种情况和减小冲击所要求的阻尼介入需求有差距。尽管现代车辆的液力减振器通常设置一个单向阀,使负重轮抬升过程中的阻尼小于回程阻尼,以减小抬升时的冲击,但并不影响减振器阻尼随速度的变化规律。也就是说,液力减振器虽能消耗振动能量,但自身的阻尼特性并不能有效减小车辆所受的冲击。
3 联动杠杆对阻尼特性的影响
对于异轴式减振器,由于增加了联动杠杆,减振器传递到负重轮处的阻尼特性必然会发生变化。或者说,由负重轮经联动杠杆传递来的使减振器产生阻尼的特征量也会发生变化。特征量的变化会改变阻尼的介入时机和变化趋势,产生的具体影响需要结合确定的杆系进行分析。本文以 A型、B型2车的联动杠杆为例进行分析。
3.1 杆系结构及减振器特征量
将平衡肘、连杆和减振器摆臂作为1个杆系,则2车杆系简化结构分别如图3、4所示。
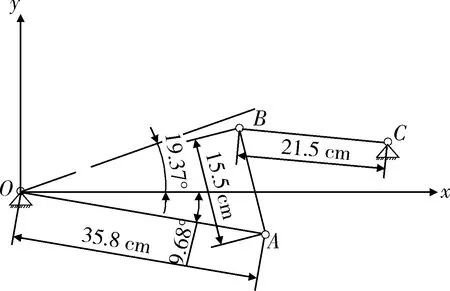
图3 A型车联动杠杆简化结构
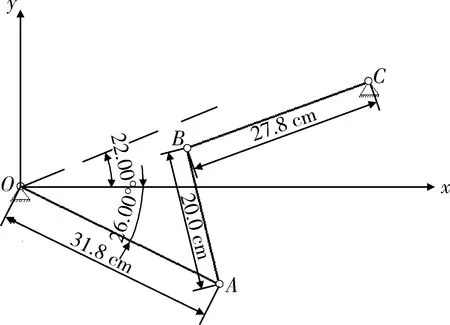
图4 B型车联动杠杆简化结构
图中:O点为扭力轴的安装中心,同时也是直角坐标系的原点;x轴指向水平方向;y轴指向竖直方向;C点为减振器的安装中心;OA段为扭力轴安装中心到平衡肘上连杆铰接点的长度;AB段为连杆的长度;BC段为减振器摆臂的长度;OA和x轴的夹角为车辆静平衡时OA段所处的位置,用位置1表示;虚线和x轴的夹角为OA段绕O点逆时针旋转所能到达的极限位置,用位置3表示;OA段处于水平状态时记作位置2。
摩擦式减振器的阻尼力与摩擦副的正压力有关,只要用力抬升摆臂就产生阻尼力,所以选力作为特征量;液力减振器阻尼力和速度有关,则选速度作为特征量。车辆从高处跌落或高速通过障碍时,由于跌落高度、车辆行驶速度及障碍不同,作用在负重轮上使其抬升的力及抬升速度也不确定,因此不便于具体分析。
为简化分析过程,假设作用在负重轮上的力和速度均不变化,因关注负重轮抬升较高时的工况,故下列分析从车辆静平衡位置开始。设杆系中的负重轮在相同的垂直作用力F作用下上移和以相同的摆动速度V上摆,把速度和力等效在A点上,用图解法求得2个杆系作用在减振器摆臂最外端B点的速度和力。
3.2 杆系对力的影响
图5、6分别为2个杆系中不同位置对力的影响结果。由图5可知:3个不同位置上B点的垂直力分别为中、小、大,即在位置1上,减振器摆臂所受垂直力大于作用在负重轮上的垂直力;在位置2上,减振器摆臂所受垂直力小于作用在负重轮上的垂直力;在位置3上,减振器摆臂所受垂直力最大。由图6

图5 A型车杆系对力的影响
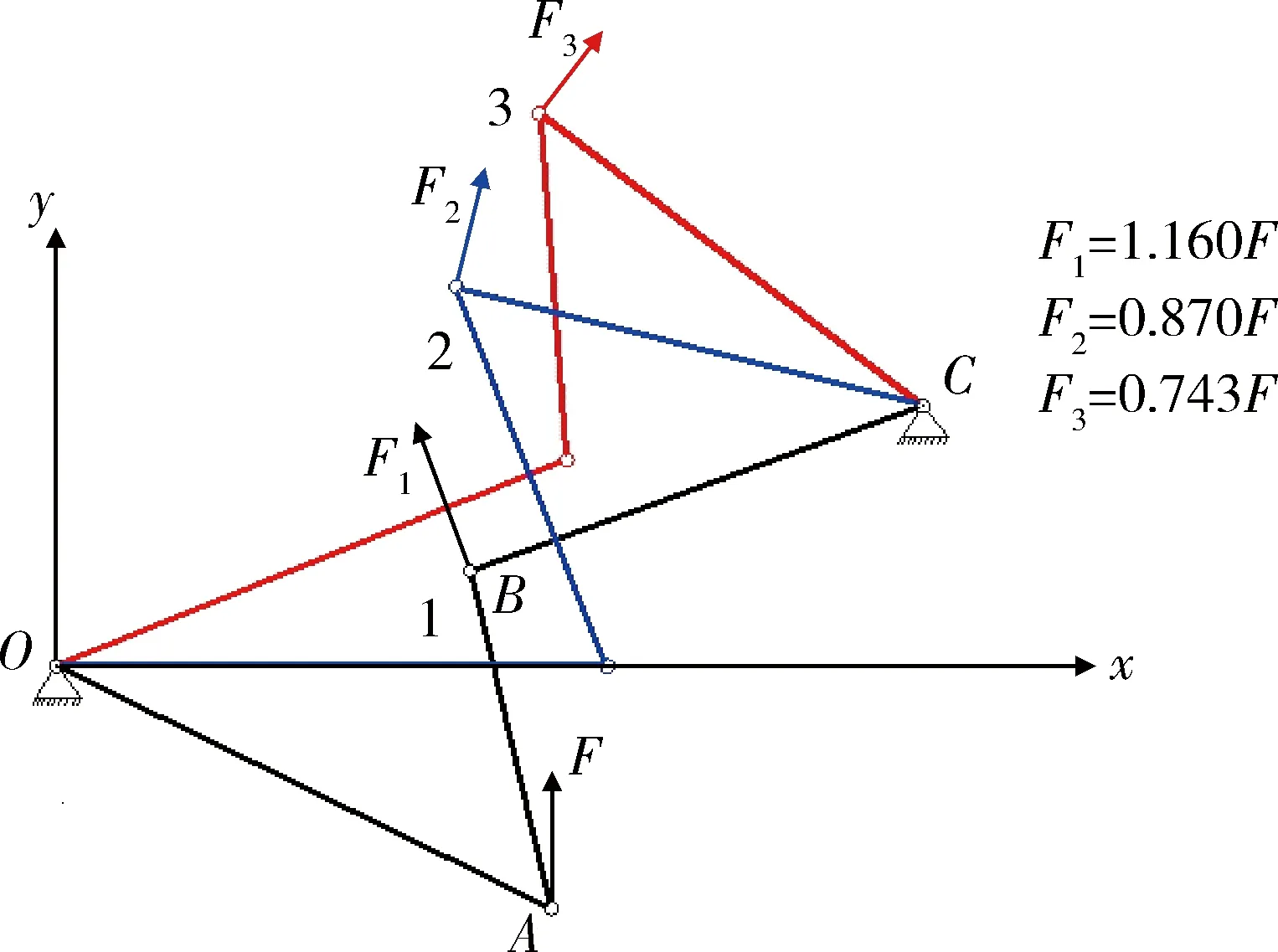
图6 B型杆系对力的影响
可以看出:3个位置上减振器摆臂处的力分别为大、中、小,其中,位置1上减振器摆臂所受垂直力大于作用在负重轮上的垂直力,其他2个位置上减振器摆臂所受垂直力均小于作用在负重轮上的垂直力。摆臂上所受垂直力的大小反映了联动杠杆对减振器提供转动力矩的大小。转动力矩的变化趋势对摩擦阻尼的贡献情况分析如下。
一旦联动杠杆尺寸及位置确定后,减振器摆臂的摆动范围就确定了。根据现有摩擦式减振器的构造可知:减振器摆臂的摆动范围决定了弹子盘的旋转范围,从而确定了弹簧的压缩量,也就确定了作用在摩擦副上的正压力。换言之,摩擦副上的正压力取决于摆臂的行程,看似与在摆臂上施加的转动力矩没有关系,但是由正压力而产生的减振器的摩擦力矩必须小于摆臂上的转动力矩,这样摆臂才可以向上运动。由于摆臂向上运动过程中,弹簧压缩量逐渐增大,导致正压力也逐渐增大,因此在理想情况下,摆臂上的转动力矩应与此保持同步,这样既有利于在负重轮抬升过程中逐渐增大阻尼,也有利于负重轮回程初期在减振器上产生较大的启动力矩,使负重轮顺利回位。如果设计的转动力矩不与摩擦力矩同步,而是虽有大小变化但始终大于摩擦力矩,也能保证摆臂上扬,但是减振器的潜能就得不到充分发挥。从这个角度看,通过联动杠杆的作用后,上述 2 型车减振器的优点都没有充分发挥。相比较而言,A型车减振器摆臂转动力矩到后期逐渐增大,满足要求,优于B型车杆系结构。
3.3 杆系对速度的影响
图7、8分别为2个杆系中不同位置对速度的影响情况。由图7可以看出:1)3个位置上减振器摆臂处的速度分别为中、大、小,其中位置3上的速度小于负重轮的运动速度,即在负重轮抬升过程中,减振器摆臂的摆动速度有一个由小变大再变小的过程;2)对于液力减振器,由于阻尼特性与速度相关,因此对应的减振器阻尼也呈现相同的变化规律,负重轮抬升初期阻尼由小变大符合降低冲击的总体需求,但由小变大提升的速度较快,相当于平衡肘每抬高1°,速度平均增加0.017V,减小冲击效果不太理想;3)当负重轮抬升到后期,阻尼由大变小则与降低冲击的总体要求不符,因为当负重轮以较高速度抬升很高时,意味着振动能量很大,需要减振器发挥阻尼作用,此时阻尼减小意味着减振器作用减小了。

图7 A型车杆系对速度的影响

图8 B型车杆系对速度的影响
由图8可以看出:1)在1、2、3位置上,减振器摆臂处的速度逐渐增大,在位置1上小于负重轮抬升速度,在其他2个位置上大于负重轮抬升速度,且在位置3上最大;2)对应的液力减振器阻尼也是由小到大变化,尤其是由位置1回位置2摆动的过程中,速度增加较慢,相当于平衡肘每抬高1°,速度平均增加0.014V,这是一种较A型车更合理的阻尼变化规律;3)从位置2到位置3时,平衡肘每抬高1°,速度平均增加0.006V,低于前期增长速度。因此,若把位置2到位置3的速度增加规律和位置1到位置2的对调,则较为理想。从总的减振趋势上看,B型车杆系优于A型车杆系。
3.4 杆系结构调整对速度和力的影响
若要取得较为理想的运动特性,需要对杆系的一些参数进行调整。以A型车为例,平衡肘、扭力轴和减振器的几何参数均不变,仅变动连杆,即AB杆的长度为60 mm就可将3个位置的速度变化规律调整到小、中、大的趋势。调整后,负重轮从平衡位置抬升到极限位置时,减振器摆臂的摆动角度为48°,约减小了3°,并不影响减振器的整体工作。图9为杆系结构调整后对速度的影响情况。
同理,调整B型车的杆系,使减振器位置右移50 mm,即增加了减振器摆臂的长度,可得到力逐渐增大的结果,如图10所示。可见:位置右移并不影响车辆悬挂系统的总体布局。

图9 缩短AB杆长度后A型车杆系对速度的影响
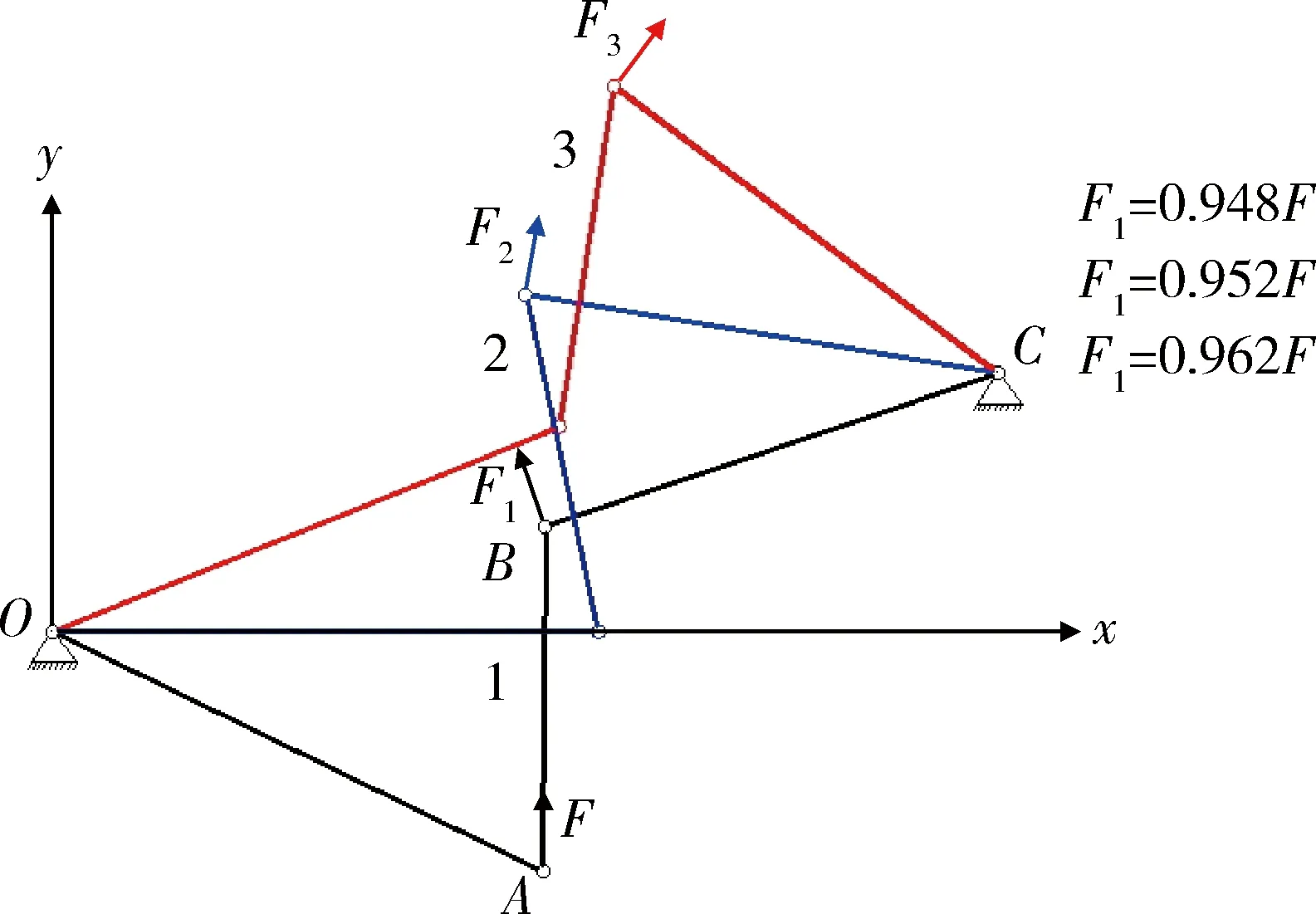
图10 右移减振器位置后B型车杆系对力的影响
上述2个调整仅考虑杆系的运动规律,并没有密切关联参数调整后对整个车辆悬挂系统布局的影响。实际上,A型车连杆变短会影响负重轮向下摆动的幅度。由分析可知:不同的联动杠杆可以把减振器自身的阻尼特性和需要的阻尼特性进行有效的关联。通常,扭力轴的位置、平衡肘的长度与静平衡位置的角度等所受约束较多,此时可通过适当调整减振器的位置、摆臂的长度和起始位置、联动杠杆的长度等来获取所需的悬挂系统阻尼特性。
上述分析立足于恒速和恒力,反映了减振器摆臂运动速度和回转力矩随负重轮位置变化的总体规律。实车使用过程中,随着冲击形式的变化,负重轮的速度规律是多样的。如果随着负重轮的抬升,阻尼也变大,这样的阻尼特性是符合要求的。如果随着负重轮的抬升,速度和力变小,由此带来阻尼绝对值的减小,也不能否定减振器的作用,只要阻尼对于相同速度和力的相对值在增加,就符合减小冲击的总要求。上述分析并没有考虑铰接点间隙及磨损量的影响。
4 结论
异轴安装的减振器,其自身的阻尼特性通过联动杠杆机构传递到负重轮时会发生变化。摩擦式减振器和液力式减振器因阻尼产生机理的不同,对减小冲击和提供阻尼的要求也不同,因而对杆系设计的要求也不同。同一杆系通常不能同时满足2种所分析类型减振器的需求。合理设计联动杠杆机构,有助于发挥减振器性能,减小车辆高速行驶或从高处跌落时车体受到的冲击。A、B这2个车型的联动杠杆机构与减振器的配合情况尚不理想。
[1] 刘维平,孙伟. 坦克装甲车辆构造学[M]. 北京:兵器工业出版社,2001:177.
[2] 孙伟. 装甲车辆构造学[M]. 北京:兵器工业出版社,2006:140.
[3] 闫清东,张连第,刘辉. 坦克构造与设计:下册[M]. 北京:北京理工大学出版社,2006:475-486.
[4] 马德军,陈亚宁. 装甲装备常用机构及零部件的设计与分析[M]. 北京:兵器工业出版社,2006:1-9.
(责任编辑: 尚菲菲)
Damping Characteristics Analysis of Non-coaxial Tank Shock Absorber with Linkage Lever Mechanism
XU Guo-ying, WANG Chuang, YAO Xin-min, WANG Tao, ZHANG Bing-xi
(Department of Mechanical Engineering, Academy of Armored Force Engineering, Beijing 100072, China)
In terms of reducing shock on running vehicle, general requirements for shock absorber damping characteristics are analyzed when road wheels rapidly uplift. Based on damping characteristics of two types of shock absorber, i.e. hydraulic and friction, variation of velocity and force of swing arm for the linkage lever mechanisms of two types of vehicles under the same swing velocity and force of road wheel is analyzed with graphical method. Problems of matching absorbers’ damping characteristics with vehicles’ requirements are discussed. The results show that the linkage lever mechanisms have influence on shock absorber property, and the linkage lever mechanisms of two types of vehicles aren’t matching well with the shock absorber characteristics.
shock absorber; damping; linkage lever; suspension system
1672-1497(2015)05-0044-05
2015-03-31
徐国英(1965-),男,副教授,博士。
TJ81+0.3
A
10.3969/j.issn.1672-1497.2015.05.010
