三轴车辆多模式全轮转向控制系统设计
2015-06-24刘西侠刘维平姚新民刘明远
袁 磊, 刘西侠, 刘维平, 姚新民, 刘明远
(1. 装甲兵工程学院机械工程系, 北京 100072; 2. 装甲兵学院指挥系, 安徽 蚌埠 233050)
三轴车辆多模式全轮转向控制系统设计
袁 磊1, 刘西侠1, 刘维平1, 姚新民1, 刘明远2
(1. 装甲兵工程学院机械工程系, 北京 100072; 2. 装甲兵学院指挥系, 安徽 蚌埠 233050)
针对三轴车辆全轮转向控制系统的设计问题,提出了一种具有多种转向模式的全轮转向控制系统。首先,建立了三轴车辆的基础运动学模型和动力学模型,并提出了全轮转向控制系统的4种转向模式;然后,针对不同转向模式,分别进行了系统控制算法研究和车辆转向性能分析;最后,通过分析转向模式应用范围和相互关系,将转向模式简化为3种,并给出了三者的切换条件。研究结果为三轴车辆全轮转向控制系统的实车应用提供了参考。
三轴车辆;全轮转向;转向模式
近年来,随着大功率发动机、全轮驱动形式、独立悬架系统以及高性能轮胎的应用,轮式装甲车辆的快速性和通过性得到了大幅提高[1-2]。然而,由于轮式装甲车辆车身较长、质心较高、车辆转动惯量偏大,客观上造成了其转弯掉头能力差和操纵稳定性不好的状况[3-4]。因此,降低车辆低速转向半径和提高车辆高速操纵稳定性已成为轮式装甲车辆面临的一个关键问题。
全轮转向系统不仅能够有效解决上述问题,而且可减轻轮胎磨损、提高驾驶员转向效率[5-7]。该系统在两轴车辆上得到了较为广泛的研究和应用,然而在多轴车辆上的研究较少[8]。另外,多轴车辆与两轴车辆的全轮转向系统相比差异较大,主要表现在:多轴车辆行驶工况复杂,且大多采用不同转向模式;多轴车辆对低速小半径转向能力要求更高;多轴车辆个别车轴可不参与转向,而采用非全轮转向方式[9-10]。因此,对于多轴车辆全轮转向系统的研究具有其特殊性和必要性。而三轴车辆作为轮式装甲车辆的典型代表,其全轮转向系统的研究方法可进一步推广到四轴或五轴车辆上。
针对三轴车辆全轮转向控制系统的设计问题,笔者以某等轴距三轴车辆为基础模型,提出了车辆4种典型转向模式,并分别对各转向模式的控制算法、转向性能及切换条件进行了分析,以期为三轴车辆多模式全轮转向系统的实车应用提供参考。
1 基础模型分析
1.1 运动学模型
为研究三轴全轮转向车辆的本质特性,忽略转向机构对各车轴左右两轮转角的影响,将车辆简化为单轨模型,如图1所示。
由图1可知:1)车辆转向半径取决于R1、R2、R3,由其中的最大值决定;2)在前轮转角δ1相同的情况下,当R1=R3时车辆具有最小的转向半径;3)车轮保持纯滚动时,各轴车轮转角δi和前轮转角δ1之间的关系满足阿克曼定理,可表示为
(1)
式中:Li为车辆转向中心O到第i轴的距离;L1i为车辆第1轴到第i轴的距离。
1.2 动力学模型
在进行车辆基本转向特性和转向控制策略研究时,通常采用反应车辆横向和横摆2个基本转向特性的2自由度动力学模型[11],如图2所示。
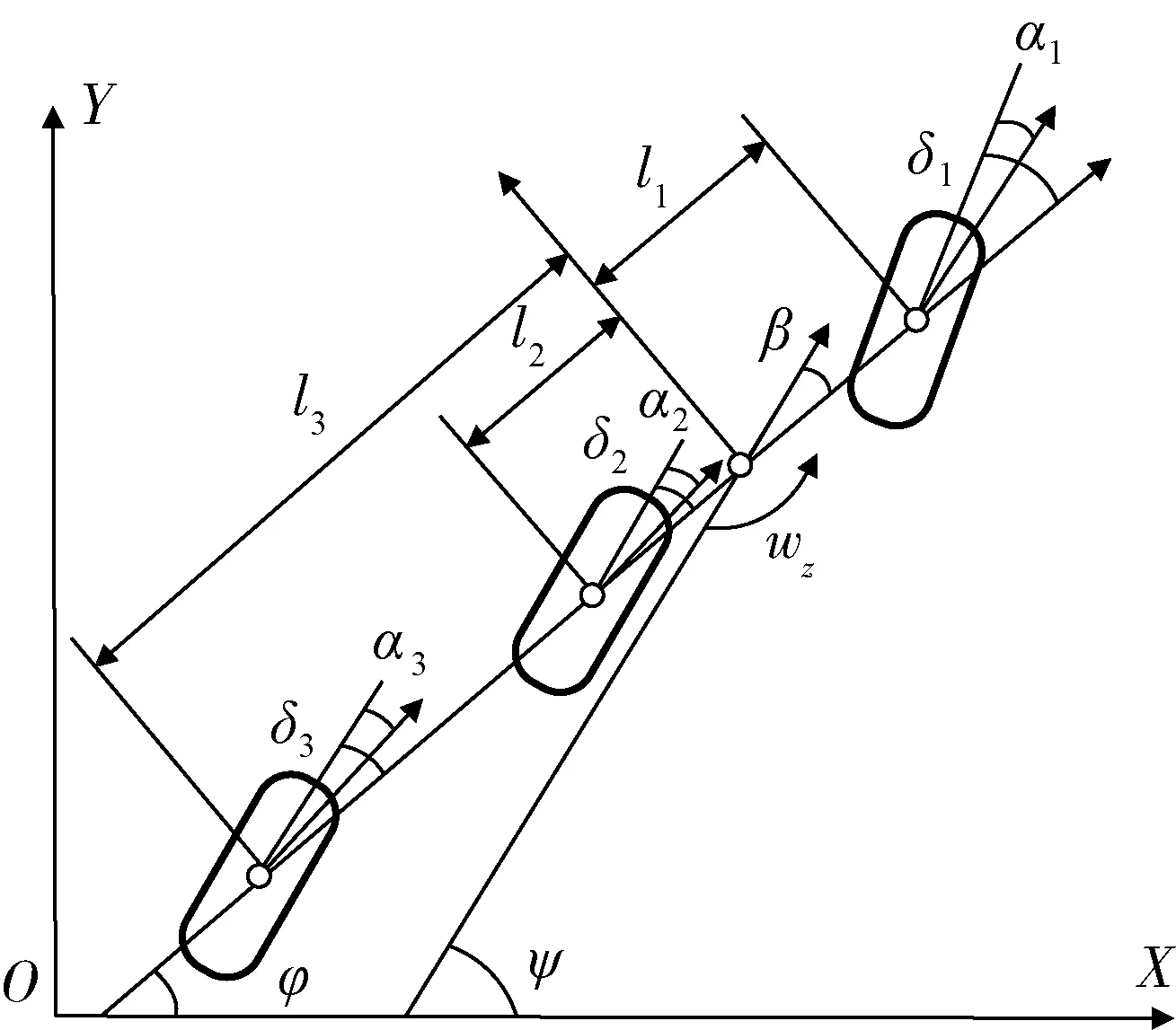
图2 车辆动力学模型
车辆动力学方程为
(2)
其中:β为车辆质心侧偏角;wz为车辆横摆角速度;vx为纵向行驶车速;vy为侧向行驶车速;m为车辆质量;li为车辆质心到第i轴的距离;C∂i为各车轮侧向刚度;αi为各车轮侧偏角;Iz为车辆横摆转动惯量;φ为车辆横摆角;ψ为车辆偏航角。
设Ki为车轮转角比例系数,即δ2=K2δ1,δ3=K3δ1,对式(1)进行拉普拉斯变换,并设ay为车辆侧向加速度,可得
(3)

(4)
(5)
式中:
1.3 转向模式分析
全轮转向是通过对各车轮转角的有效控制来实现车辆运动控制的转向方式。根据车辆几何学模型、动力学模型和转向需求,可得出如下结论。
1) 由几何学模型分析可知:车辆转向时,采用前后轴转向能够使车辆具有最小转向半径,称该模式为Mini模式,如图3(a)所示。
2) 由动力学模型分析可知:车辆转向时,存在质心侧偏角β,若能保证β=0,则车辆具有较好的轨迹跟踪能力,该转向方式能够同时改善车辆高、低速的转向性能,称为Auto模式,如图3(b)所示。
3) 当车辆转向移位操纵或臂障转向时,通常希望采用横摆角速度wz=0的控制方式,此时车辆能够实现平行移位,称为Crab模式,如图3(c)所示。
4) 当全轮转向控制系统中的传感器或执行机构出现故障时,可采用前轮转向,称为FWS模式,如图3(d)所示。原型车采用双前桥转向,称为DFWS模式。

图3 三轴全轮转向车辆转向模式
2 转向模式
2.1 Auto模式
2.1.1 控制策略
全轮转向Auto模式是指控制系统基于车辆车速和相关状态参数,自动控制车辆后两轴车轮转角,以提高车辆的低速机动性和高速操纵稳定性。为提高车辆低速机动性,采用前后轴车轮逆相位转向;为提高车辆高速操纵稳定性,采用前后轴车轮同相位转向。该模式通常采用β=0的控制方法,即零质心侧偏角比例控制策略。
零质心侧偏角比例控制实质上是基于车辆行驶速度和质心侧偏角为0的条件,确定出车辆转向中心位置,并进一步确定出各车轮转角[12]。由式(3)中s=0,β=0,可得车辆稳态时转向中心到第1轴的距离L1,即
L1=
(6)
进一步根据式(1)可求得车辆转向中心位置和车轮转角比例系数随车速的变化规律,分别如图4、5所示。
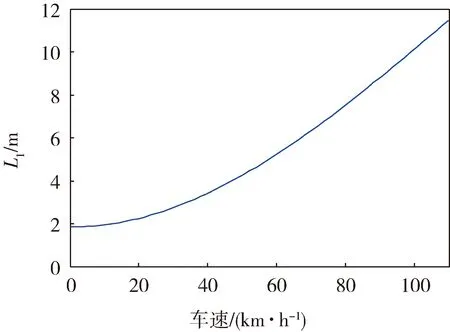
图4 车辆转向中心位置

图5 车轮转角比例系数
由图4可知:随着车速增加,车辆转向中心逐渐后移,这表明后两轴车轮由逆相位转向逐渐变化到同相位转向。由图5可知:后两轴车轮低速时,与前轮逆相位转向;高速时,与前轮同相位转向,其转折车速为45 km/h。
2.1.2 转向性能分析
取式(3)-(5)中的拉式变化因子s=0,可计算FWS模式、DFWS模式和Auto模式下车辆的质心侧偏角稳态增益值β/δ1、横摆角速度稳态增益值wz/δ1和侧向加速度稳态增益值ay/δ1,其变化曲线分别如图6-8所示。
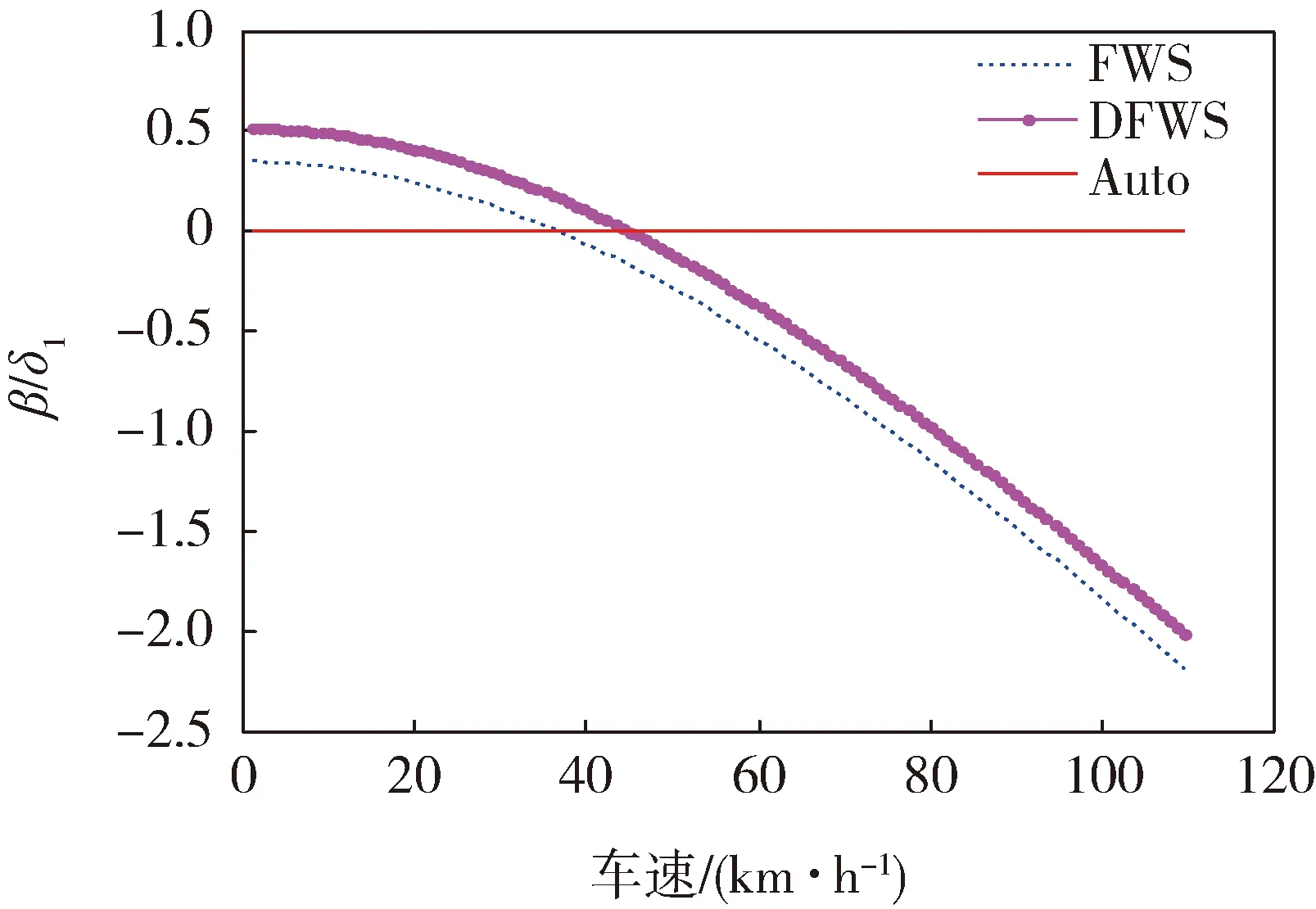
图6 质心侧偏角稳态增益
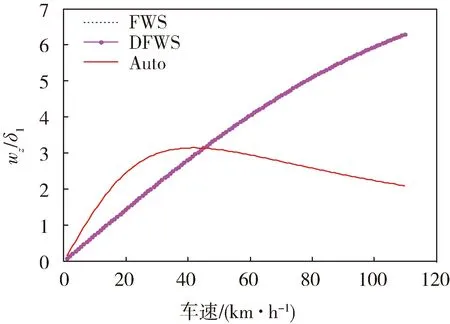
图7 横摆角速度稳态增益
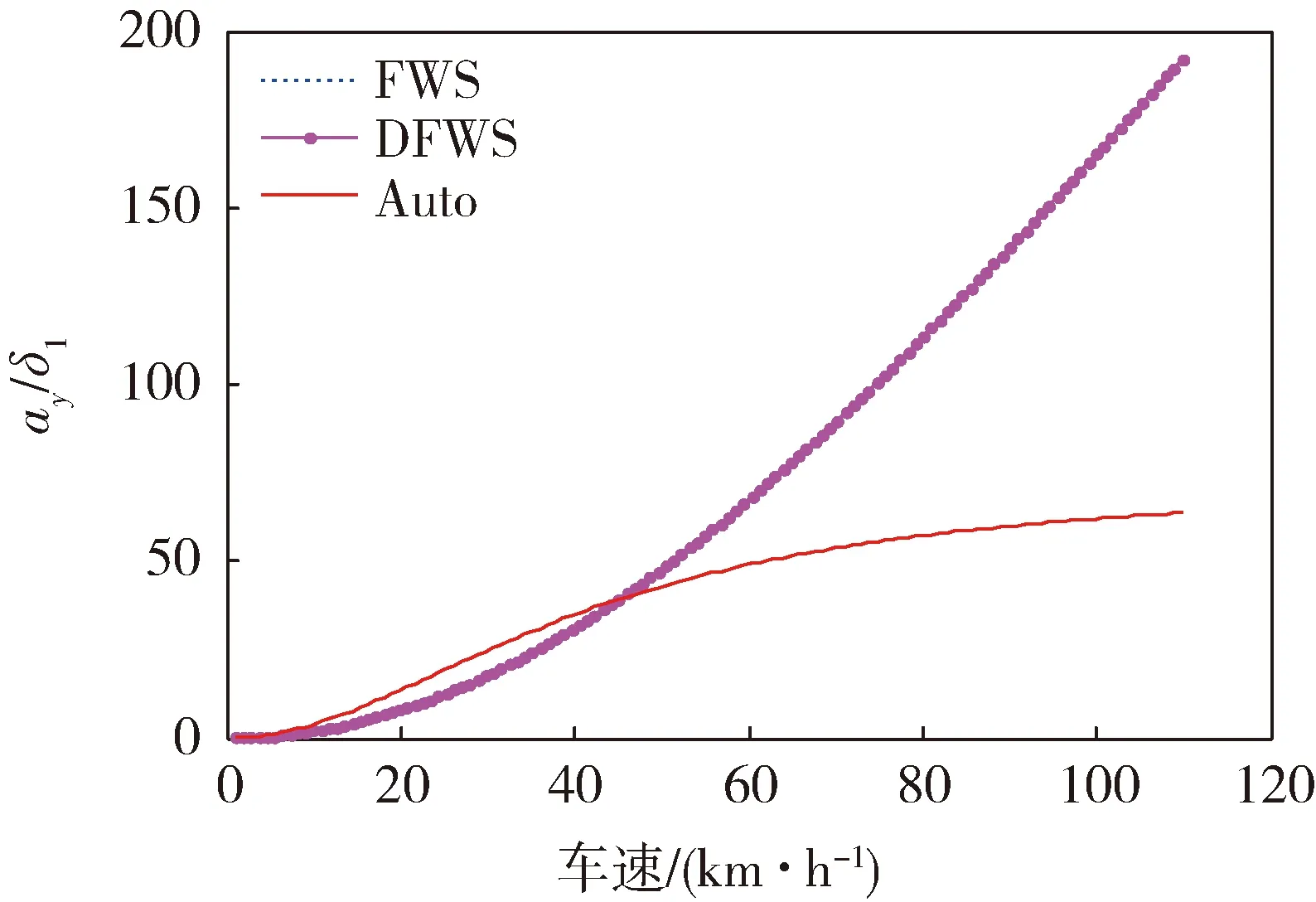
图8 侧向加速度稳态增益
由图6可知:在Auto模式下,车辆质心侧偏角稳态增益基本保持为0;在FWS模式和DFWS模式下,质心侧偏角增益在车辆高速时出现负值,这容易导致车辆的高速侧滑。由图7、8可知:在Auto模式下,车辆高速行驶时,横摆角速度稳态增益减小,侧向加速度稳态增益基本保持不变,表明车辆的高速稳定性得以提高。
2.2 Mini模式
2.2.1 控制策略
Mini模式主要用于减小车辆的低速转向半径。在Auto模式中,更为关心车辆的轨迹保持能力,对车辆低速机动性能要求不高。为实现车辆最小转向半径,采用前后轴转向的Mini模式,该模式下车辆的转向中心位于中轴,车辆后轮与前轮逆相位转向。虽然该模式具有最小转向半径,但高速时可能会出现横摆过大、容易侧滑的情况。
2.2.2 转向性能分析
在车速为20 km/h、前轮转角为10°的角阶跃仿真工况下(如图9所示),对车辆各转向模式下的转向半径、质心侧偏角和横摆角速度进行对比分析,分别如图10-12所示。
图9 前轮转角阶跃信号
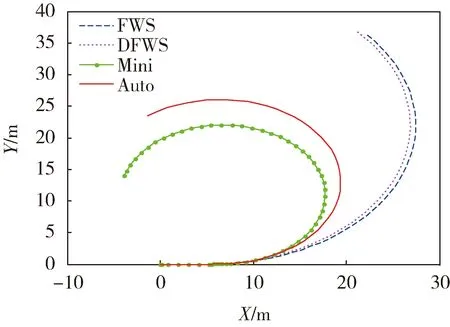
图10 转向半径对比分析
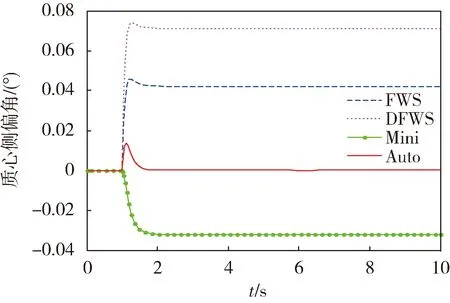
图11 质心侧偏角对比分析
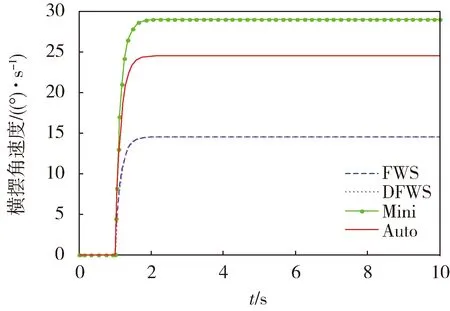
图12 横摆角速度对比分析
由图10可知:车辆在Mini模式下具有最小转向半径,这种情况在车辆低速工况下更为明显。由图11可知:车辆在Mini模式下出现了质心侧偏角为负的情况,表明车辆有侧滑趋势。由图12可知:车辆在Mini模式下,横摆角速度较大,可能会导致驾驶员出现不适应的情况。考虑到Mini模式高速稳定性不好的情况,该模式仅适用于车辆低速转向工况。
2.3 Crab模式
2.3.1 控制策略
Crab模式主要用于车辆移位操纵,适用于车辆的停车入位和紧急避障工况。该模式的控制目标是保证车辆的平行移动,即车辆的横摆角速度为0。根据式(4),设拉氏变化因子s=0,若要保证车辆的稳态横摆角速度始终为0,则必须有K2=K3=1,即车辆所有车轮具有相同的转向角。该模式主要适用于全轮驱动的车辆,且通过牺牲车辆的轨迹跟踪能力来实现车辆的平行移位,在高速时可能存在车辆稳定性和可控性不好的问题。
2.3.2 转向性能分析
在车速为10 km/h,前轮转角为从0°到20°再回到0°的移线转角信号的仿真工况如图13所示,车辆的移线行驶轨迹、横摆角速度和质心侧偏角分别如图14-16所示。
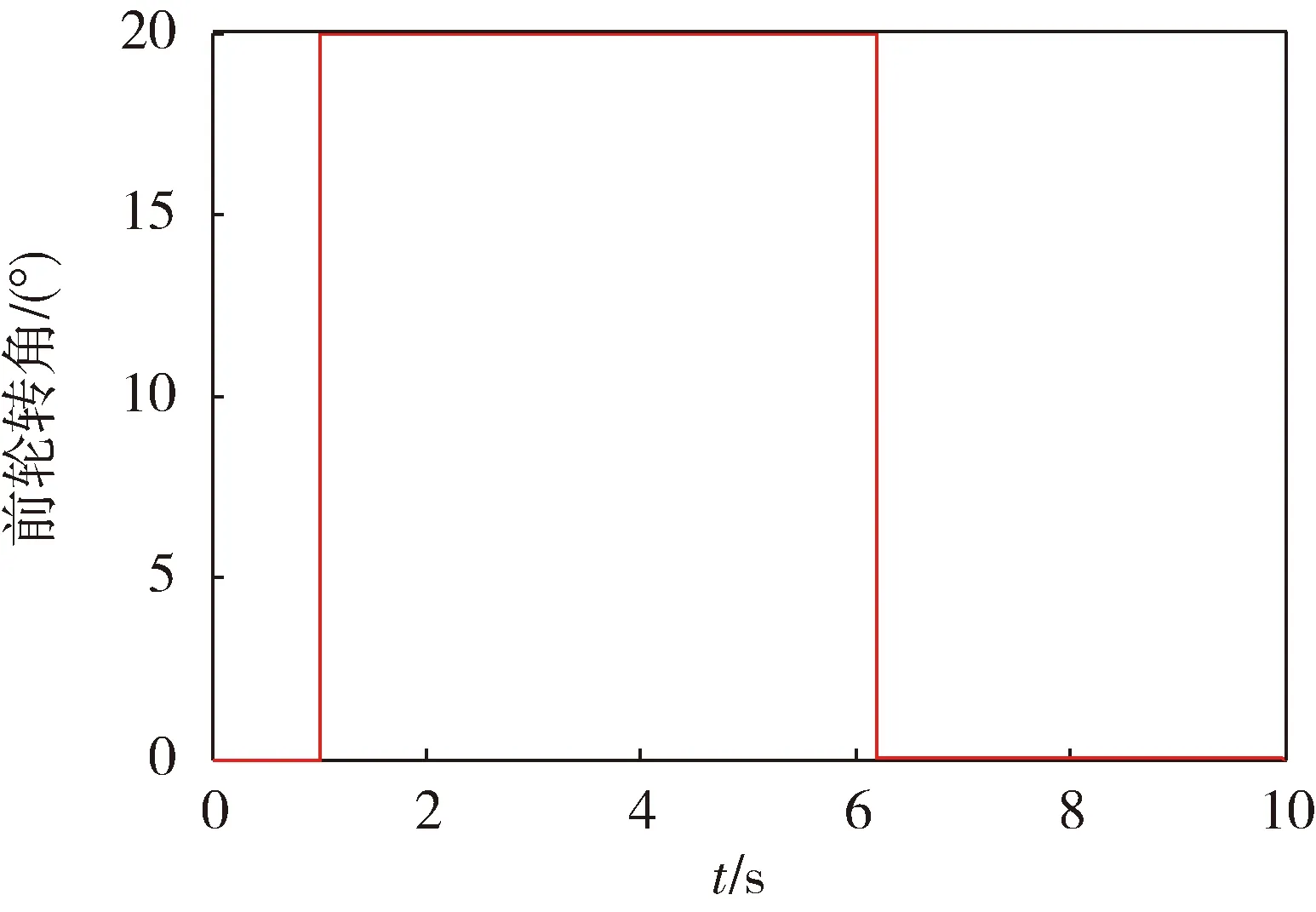
图13 前轮移线转角信号
由图14可知:车辆实现了移位操纵。由图15可知:在车辆移位过程中,其横摆角速度基本保持为零。由图16可知:在车辆移位过程中,其质心侧向偏角存在偏大的情况,这种情况在高速移线操纵时更加明显。因此,Crab模式多适用于车辆的低速转向工况。

图14 车辆移线行驶轨迹
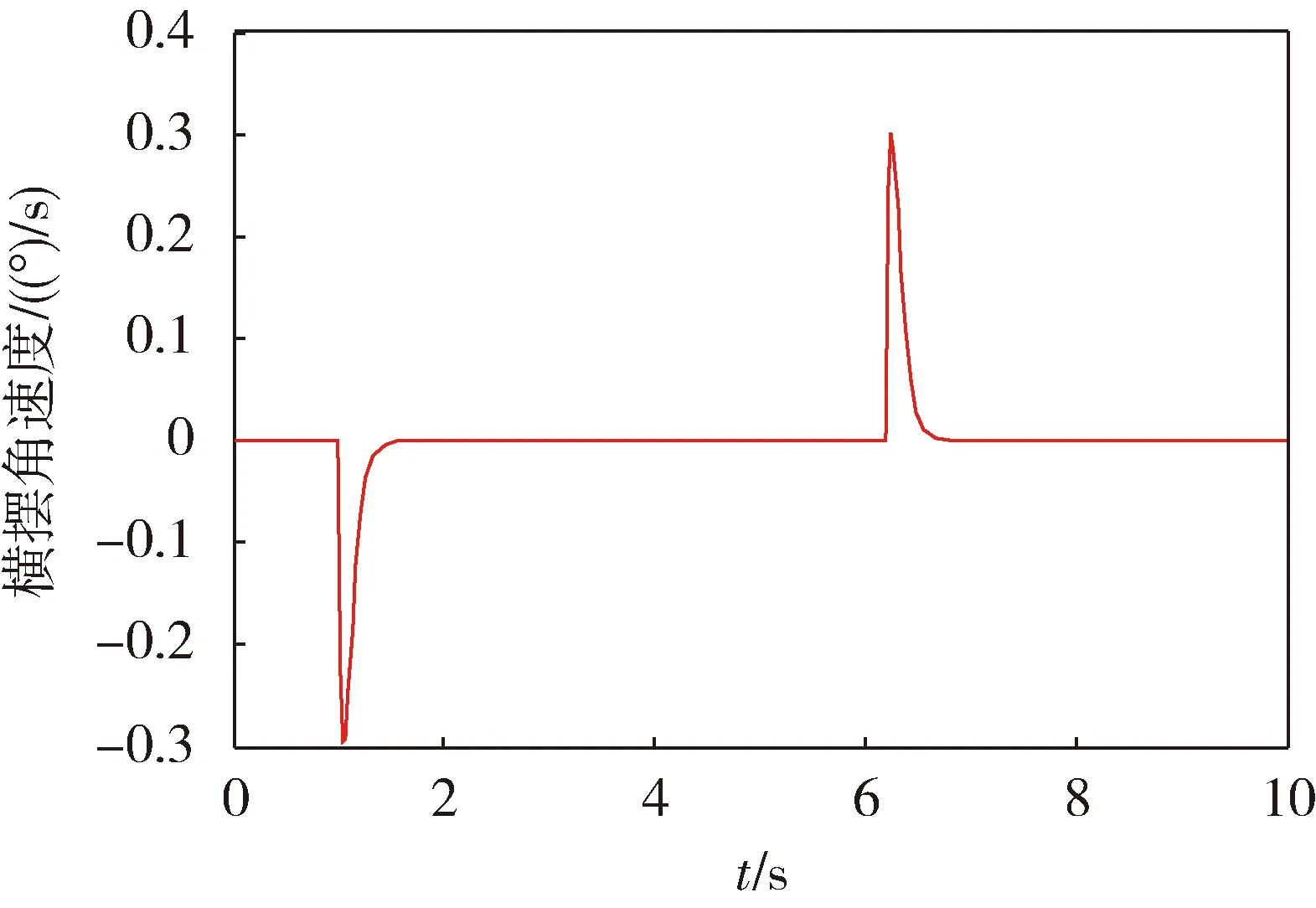
图15 横摆角速度
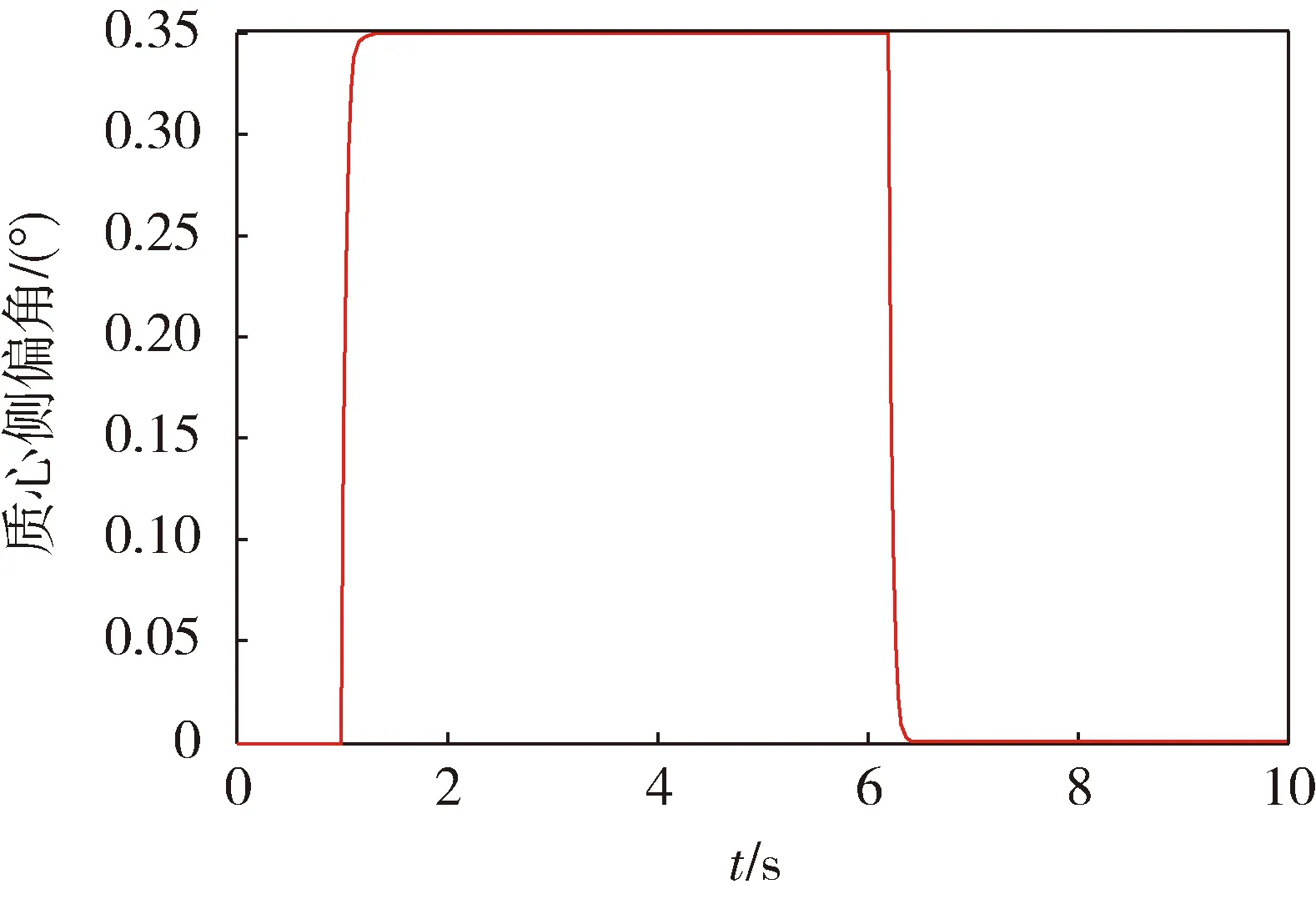
图16 质心侧偏角
3 实车应用分析
3.1 线性工作区域分析
考虑到当ay<0.4g时,车轮处于线性区域,该区域内基于线性模型推导的全轮转向控制系统效果较好[13]。另外,对于Crab模式的移位操纵,通常限制车辆的移动速度小于30 km/h。设前轮最大转角为30°,基于式(3)、(5)对比分析Auto模式、FWS模式和DFWS模式的线性工作区域,如图17所示,并分别给出Mini模式和Crab模式低速时的线性工作区域,如图18、19所示。
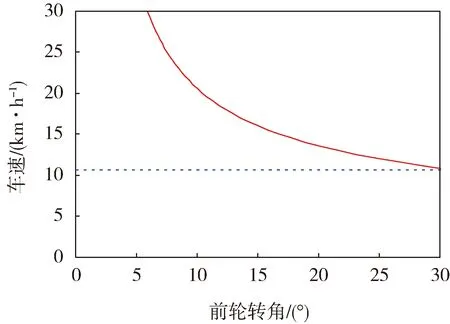
图18 Mini模式低速线性工作区域
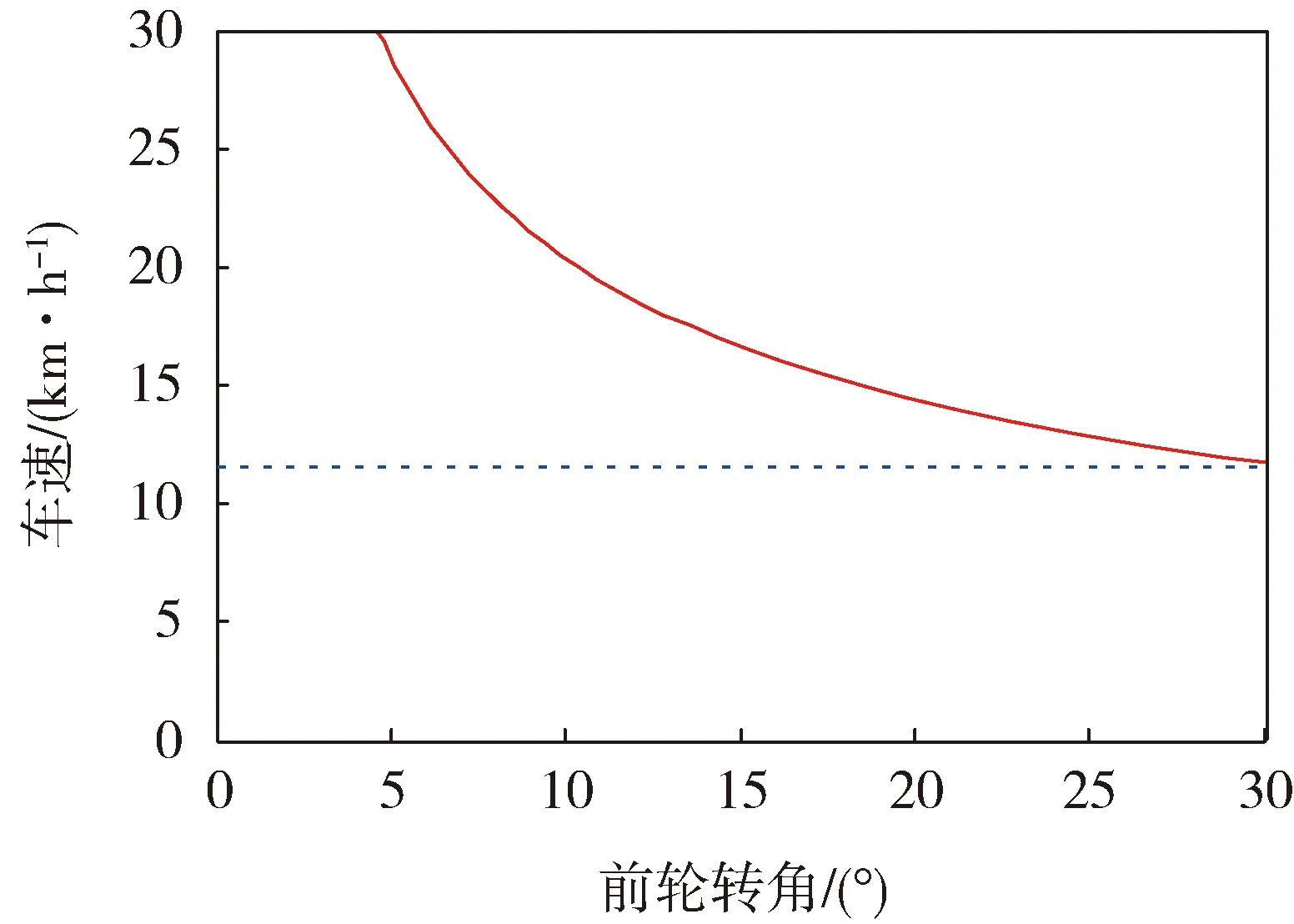
图19 Crab模式低速线性工作区域
由图17可知:1)FWS模式和DFWS模式具有相同的线性工作区域;2)当车速低于45 km/h时,Auto模式的线性工作区域低于FWS模式和DFWS模式;3)当车速高于45 km/h时,Auto模式的线性工作区域高于FWS模式和DFWS模式。在Auto模式下,由于逆相位转向多在低速情况下使用,且采用了零质心侧偏角的控制方法,车辆轨迹可控性强,因此可不对车轮转角作出限制;同相位转向时,由于车速较高,对控制系统的精度要求较高,因此限制车辆在前轮转角小于3°时使用。
由图18、19可知:前轮转角为30°时,Mini模式和Crab模式的线性区域最高车速分别为13.3、11.5 km/h。由于上述2种转向模式通常要求车辆具有较大的前轮转角,且考虑前轮转角为20°时的使用频率较高,前轮转角为30°一般在较低车速时使用更多。因此,可设置Mini模式和Crab模式的最高使用车速为15 km/h。
3.2 转向模式整合
由前述转向模式分析可知:1)Mini模式、Auto模式和Crab模式都可在低速应用;2)Crab模式由于后两轴车轮与前轮始终同相转向,因此与Auto模式和Mini模式有较大差别;3)Mini模式与Auto模式低速时都采用反相转向,其中后两轴车轮的转角比例系数如图20所示。
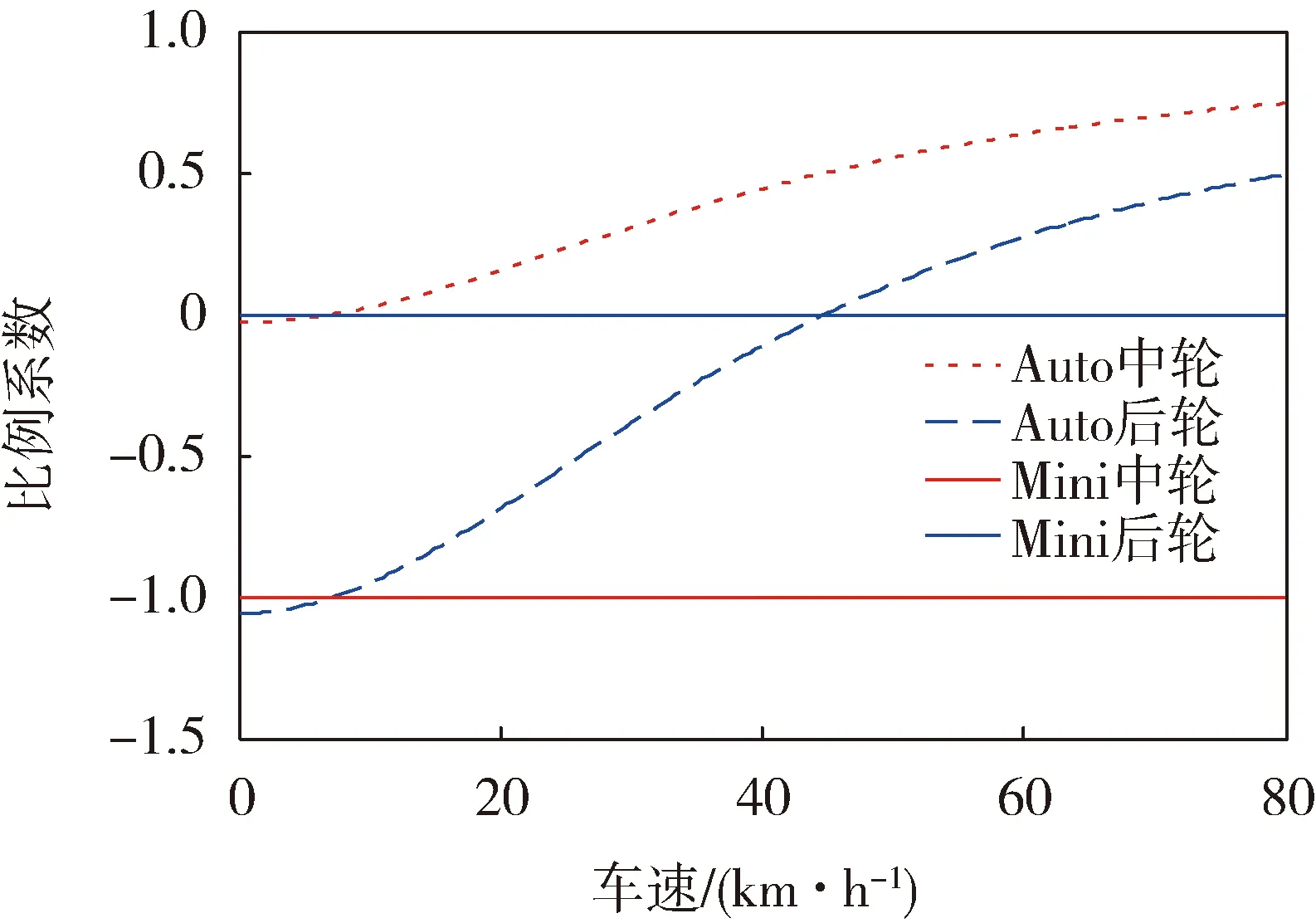
图20 转角比例系数对比
由图20可知:Auto模式和Mini模式之间存在交点,此时前轴与中轴的距离为1.9 m。由
=1.9
(7)
可计算出交点车速为vx0=7.29 km/h。因此,可考虑把Mini模式和Auto模式进行整合,当车速低于vx0时采用Mini模式,高于vx0后自动转换为Auto模式。整合后的Auto模式转角比例系数如图21所示。

图21 整合后Auto模式转角比例系数
根据图21的车轮转角关系,可采用约束条件进行控制器设计,其约束条件为
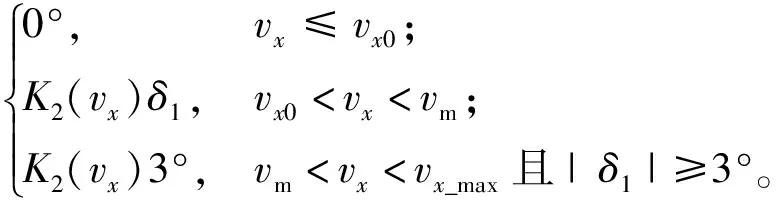
(8)
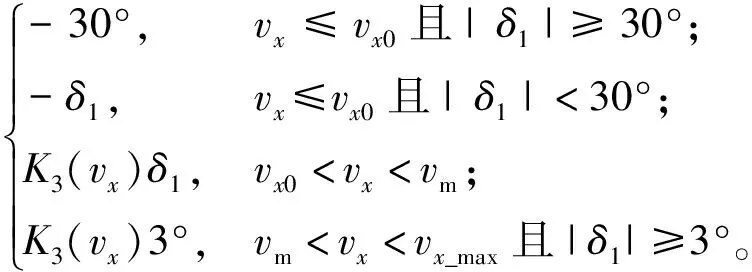
(9)
式中:vm=45 km/h,为转折车速;vx_max=80 km/h,为初步设置的车辆最高车速。
3.3 转向模式切换
基于以上分析,全轮转向系统最后简化为Auto模式、Crab模式和FWS模式。3种模式之间可通过驾驶员手动切换。在切换时,必须满足的切换条件如下。
1) 相互切换:vx<2 km/h,wz<0.5°/s,t>1 s。即车速较低,车辆不转向,且该状态保持1 s,则可进行3种模式之间的相互切换。
2) Crab模式转换为Auto模式:vx<15 km/h,wz<0.5°/s,t>1 s。即整个车速范围内,车辆不转向且该状态保持1 s,则可进行Crab模式到Auto模式的手动切换。
3) Auto模式转换为Crab模式:vx<15 km/h,wz<0.5°/s,t>1 s。即车速满足Crab模式应用范围,车辆不转向且该状态保持1 s,则可进行Auto模式到Crab模式的手动切换。
4) 当传感器、控制器和转向执行结构出现故障时,车辆后两轴自动回正并锁死,采用FWS模式。
4 结论
笔者设计了一种具有多种转向模式的全轮转向控制系统,文中对系统不同转向模式的控制策略、转向性能和切换条件进行了分析。结果表明:三轴车辆全轮转向控制系统可分为3种转向模式,转向模式的切换可通过约束条件设置来实现。研究方法对更多轴车辆的全轮转向控制系统设计具有借鉴意义,研究结果对三轴车辆全轮转向系统的开发具有参考价值。
[1] 杜志歧. 轮式装甲车辆总体设计的概念、思路与特点[J]. 兵工学报,1999,20(4):351-353.
[2] 陈志刚,翟涌,陈慧岩. 轮式装甲车辆自动变速操纵技术的研究[J].兵工学报,2004,25(4):394-397.
[3] 孟红,项昌乐,孙旭光,等. 轮式装甲车辆不同差速器方案操纵稳定性仿真研究[J]. 兵工学报,2009,30(3):262-265.
[4] 陈欣,孙园园,李立平,等. 多轴轮式车辆通过连续障碍性能仿真研究[J]. 北京理工大学学报,2012,32(1):18-22.
[5] 陈思忠,孟祥,杨林,等. 三轴汽车多轮转向技术研究[J]. 北京理工大学学报,2005,25(8):679-683.
[6] 郑凯峰. 四轴重型车辆电控液压全轮转向系统研究[D]. 北京:北京理工大学,2014.
[7] 张俊友,王树凤,李华师. 五轴重型全轮转向汽车操纵稳定性分析[J].农业机械学报,2008,39(9):30-34.
[8] 魏冬. 后轮独立控制的四轮转向系统研究[D]. 重庆:重庆交通大学,2011.
[9] 周富家. 多轮转向全路面起重机操纵稳定性控制算法研究[D]. 长春:吉林大学,2007.
[10] 刘芹芹. 重型车辆多轴转向控制方法及仿真[D]. 长春:吉林大学,2011.
[11] 余志生. 汽车理论[M]. 北京:机械工业出版社,2000.
[12] 袁磊,刘西侠,刘维平. 三轴车辆全轮转向系统方案设计与性能仿真[J]. 郑州大学学报:工学版,2014,35(6):120-124.
[13] 杜峰. 基于线控技术的四轮主动转向汽车控制策略仿真研究[D]. 西安:长安大学,2009.
(责任编辑: 尚菲菲)
Design for Multi-mode All-wheel Steering Control System of Three-axle Vehicles
YUAN Lei1, LIU Xi-xia1, LIU Wei-ping1, YAO Xin-min1, LIU Ming-yuan2
(1. Department of Mechanical Engineering, Academy of Armored Force Engineering, Beijing 100072, China;2. Department of Command, Academy of Armored Forces, Bengbu 233050, China)
Aiming at the design problem of all-wheel steering control system in three axle vehicle, an all-wheel steering control system with multiple steering modes is proposed. Firstly, the basic kinematic model and dynamic model of three axle vehicle is built and four kinds of steering modes are put forward accordingly. Then, aiming at different steering modes, the control algorithm and steering characteristics are researched respectively. At last, through the analysis of the application range and the mutual relationship of the steering mode, the steering mode is simplified to three kinds, and the switching condition of them are given. The research results provide a reference for the application of all-wheel steering system in three axle vehicle.
three axle vehicle; all-wheel steering; steering mode
1672-1497(2015)05-0032-07
2015-07-06
军队科研计划项目
袁 磊(1990-),男,博士研究生。
U461.6
A
10.3969/j.issn.1672-1497.2015.05.008
