无人机电磁弹射器的综合制动方法*
2015-06-21吴峻杨宇赵宏涛邓志雄国防科技大学机电工程与自动化学院湖南长沙410073
吴峻,杨宇,赵宏涛,邓志雄(国防科技大学机电工程与自动化学院,湖南长沙410073)
无人机电磁弹射器的综合制动方法*
吴峻,杨宇,赵宏涛,邓志雄
(国防科技大学机电工程与自动化学院,湖南长沙410073)
利用直线电机实现无人机在短距离内可控地加速起飞已是固定翼无人机弹射起飞一种新的发展方向。为了使飞机分离后弹射台能在较短距离里完成制动,提出了直线电机弹射轨道末段定子实铁心涡流制动、运用Halbach永磁体阵列的涡流制动和橡胶阻尼制动等三种方式的综合方案,并分别对它们进行了分析计算。当弹射台的速度大于10m/s时,定子实铁心产生的涡流制动效果明显,当弹射台的速度低于3m/s时,定子实铁心涡流制动产生的制动力将迅速下降。Halbach永磁体阵列的涡流制动方式在飞机分离点开始实施,可以增加30%以上的制动效果。通过模型分析和碰撞试验,橡胶阻尼制动作为最后一级制动方式,能够有效吸收能量,实现在较短距离里的制动。
电磁弹射器;永磁直线电机;涡流制动;Halbach排列;橡胶阻尼制动
无人机电磁弹射器是利用直线电机产生电磁力将飞机在短距离内推进至起飞速度的装备,它具有效率高、结构紧凑、维护方便、弹射全程速度可控等优点,是固定翼无人机发射起飞的一个新方向[1-4]。为了适应战场环境,弹射电机长度和重量都必须有限制。在设计中,弹射轨道被分配为飞机弹射加速段和起飞后的制动段,通常优先考虑延长加速段来增大弹射起飞速度。在电机整体长度受限的情况下,制动段距离必然受到进一步限制。因此,必须加强研究短行程电磁弹射系统的制动问题,在不影响无人机弹射起飞的前提下,使弹射台的制动距离越短越好。
电机系统通常采用反接制动、再生制动、电阻制动等方式,直线电机系统也有采用涡流制动方式的。涡流制动方式对电磁弹射器结构改动小,容易实现,文献[5]针对电磁弹射的制动特性,提出制动段采用非叠片定子铁心加强涡流制动力的方法,给出了计算制动力的数值拟合公式,并对电机的制动性能进行了仿真,但该方法所提供的制动力有限,难以完全满足实际需求;橡胶阻尼制动方式成本低,制动效果好,但动子末速度较大时,单一的橡胶阻尼制动方式制动效果欠佳,容易对动子造成损坏。文献[6]针对双边型直线永磁无刷直流电机的电磁制动方法展开研究,比较分析了几种电磁制动方案,并给出了仿真结果,但几种方法单独使用,制动效果仍有限。吴峻等提出的综合方法是在原有采用非叠片定子铁心加强涡流制动的基础上,另外独立增加Halbach永磁体阵列涡流辅助制动装置,并在轨道末端应用橡胶阻尼方式来实现最终制动,这种方法能避免出现单一方式制动能力不够且有可能造成动子碰撞损坏的问题。
1 无人机电磁弹射器模型及制动方法的描述
无人机电磁弹射器主要包括控制系统、储能模块、电力电子模块、直线电机四个部分。直线电机作为电磁弹射器的执行机构,要求推力大、机械性能优。由于永磁无刷直流直线电机(Linear Permanent Magnet Brushless Direct Current Motors,LPMBLDCM)具有类似交流电机结构简单、维护方便的优点,又具有类似直流电机调速性能好、效率高、单位出力大的特点,因此,采用一种对称双边结构的LPMBLDCM。如图1所示,它的定子采用短距集中型绕组,直线电机的定子构成了弹射轨道,弹射平台是直线电机的动子。飞机起飞后,弹射平台须制动,因此,在电机传统的结构基础上,还需考虑设计相关的制动措施。
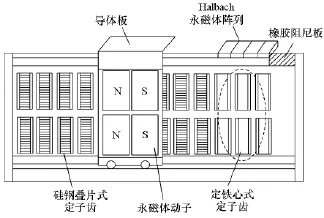
图1 电磁弹射器的直线电机结构Fig.1 Structure of linearmotor in EM launcher
现有的电制动有能耗制动、再生制动、反接制动以及涡流制动等。其中,能耗制动在低速时无法实现有效制动,且能量全部以热能形式消耗,这就要求电机具有良好的散热特性;再生制动则须增加功率器件,能量回馈到主回路技术复杂;反接制动能够产生较大的制动力,但控制时机比较重要,易导致器件过载;涡流制动,相对来说比较简单,它利用在电磁场中做切割磁力线运动的导体所产生的电涡流与其自身电阻共同作用生成热,使运动物体的动能转化成热能来实现制动。因此,电磁弹射器的电制动主要采用涡流制动方式,并以橡胶阻尼制动作为辅助。
根据直线电机的特点,末段的定子铁心采用实心方式以增加涡流效应,不仅如此,在制动末段两侧还布置了永磁体阵列来增强涡流制动效果。最后,在轨道的尾端增加了橡胶阻尼来提供足够的制动力使弹射台停止。因此,弹射台的综合制动过程表现为:无人机飞离后,定子线圈停止供电,弹射台进入定子铁心实心区域,运动的永磁体动子由于在定子铁心中产生的涡流而产生制动力,弹射台的速度降低;同时,两侧布置的永磁涡流制动装置进一步使弹射台速度降低;弹射台进入制动段末端时,与橡胶阻尼器碰撞接触,橡胶阻尼吸能可将弹射台完全制动。
2 直线电机末段实铁心涡流制动方式的分析计算[5]
将直线电机末段定子铁心结构改为非叠片的实心形式,目的是在不改动电机结构的前提下,增加定子铁心的涡流损耗,提升涡流制动力。如图2所示,视定子铁心为无限大的金属平面,满足p2≫1,p≪μr时,动子产生的运动磁场切割实心铁心而产生的涡流损耗可以表示为[7]:

其中,Pe是实心铁心中的涡流损耗,p定义为τ/δ,q定义为π/τ,τ是行波磁场等效极距,δ是实心铁心的集肤深度,σ是实心铁心的电导率,μr是实心铁心的相对磁导率,Kz是行波磁场等效电流层的线密度,b是电流层到实心铁心的距离。
相应地,涡流损耗产生的制动力为:

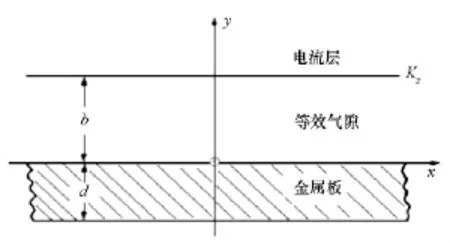
图2 磁场中的厚金属板Fig.2 Thickmetal plate in magnetic
铁心的磁导率、电导率以及动子极距都为常数,所以式(1)可以简化为涡流损耗与动子速度v之间的函数关系,并且考虑到实际的定子铁心表面为周期变化的齿槽结构,式(1)近似简化为:

表1为利用有限元计算得到的涡流损耗结果,利用这些数据可以进行结果拟合,得到多项式的四个系数大小,它们分别为:a3=540 500,a2=868 900,a1=-2 368 500,a0=0。图3所示为多项式计算结果与有限元计算结果对比,两者基本吻合,式(3)的准确性得到验证,式(3)的计算结果可以用来分析实铁心涡流制动方式的制动效果。

表1 用于计算多项式系数的数据Tab.1 Data for calculation in polynomials
由图3可知,当弹射台的速度大于10m/s时,定子实铁心涡流制动产生的制动效果明显,当弹射台的速度低于3m/s时,定子实铁心涡流制动产生的制动力将迅速下降,此时效果不明显,需要增加其他的辅助制动措施。
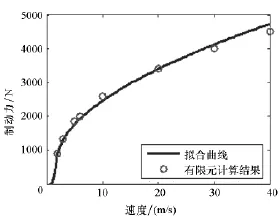
图3 简化多项式计算结果与有限元计算结果对比Fig.3 Comparison between polynomials and FEM
3 运用Halbach永磁阵列的涡流制动方式的分析计算
在直线电机末段飞机分离点的两侧布置永磁阵列,并在动子上相应地增加次级导体板,利用永磁阵列与运动导体板之间的涡流作用来实现制动。它的特点是不需外加励磁电源,不存在断电失效情况。如图4所示,当金属板以一定速度通过永磁体阵列所形成的交变磁场时,金属板内感应出电动势和涡流,涡流磁场与永磁体磁场相互作用产生水平方向的制动力,从而达到制动效果。Halbach结构具有“磁单极子”的特性,能够让阵列一侧的磁场很强,另一侧的磁场很弱,这样既可以增强制动装置在磁场强侧的制动力,又可以解决磁场弱侧的磁屏蔽问题,因此,永磁体阵列采用了Halbach结构形式[8-11]。
为简化分析做如下假设:导体板与永磁体在X方向均无限延伸;导体板材料电导率为常数,不受温度影响;导体板材料的磁导率为常数;磁感应强度在Z方向恒定。通过引入假设条件,将三维场问题简化为YOZ平面上的二维场问题。
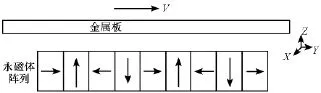
图4 单边型永磁涡流制动装置示意Fig.4 Sketch map of one side permanent eddy current brake
涡流制动力的公式为:

其中,B为磁感应强度,J导体板中的电流密度。低速时不考虑集肤效应,制动力公式可写为:

其中,L为导体板与永磁体相对面长度,H为导体板与永磁体相对面宽度,D为导体板厚度,σ1为导体板的电导率,B为导体板中磁感应强度平方均值。

由式(5)可知,制动力与Ba2成正比。
当永磁体总体积确定时,选择不同的排列方式,得到的磁感应强度不同。Halbach阵列的结构参数有:极距τ,Z方向充磁块长度与极距之比α。称α为极弧系数。永磁体与导体板间距为5mm时与τ,α的关系如图5所示。
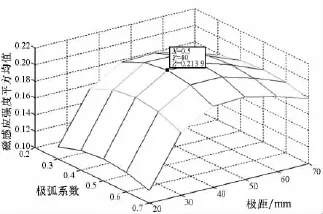
图5 磁感应强度平方均值随极距、极弧系数变化曲面Fig.5 Variations ofmagnetic flux density square with polar distance and magnet duty
由图5可知,极弧系数α=0.5时B2a最大。永磁体与导体板间距为5mm时,极距τ=40mm时,B2a最大。实际中,磁感应强度在Z方向上呈指数递减。但是在高速时,由于集肤效应,导体板电流集中在表面,可以等效为面电流层,因此只考虑永磁体在导体板表面处产生的磁感应强度。为了在高速时获得更大的制动力,应选择永磁体极距为40mm。利用Ansoft Maxwell12进行有限元仿真,不同极距下制动力随速度变化曲线如图6所示,高速段极距为40mm时,制动力更大。
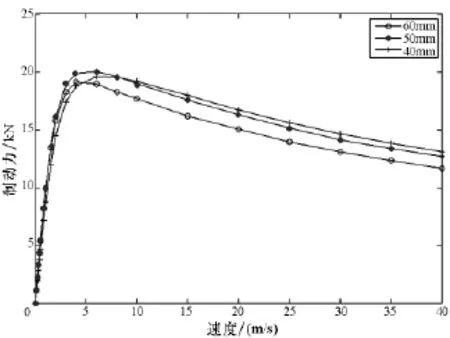
图6 不同极距下的制动力曲线Fig.6 Brake force curve with different polar distance
根据表2中的参数,仿真计算条件为:质量为50kg,初速速度为28m/s。涡流制动力与速度曲线如图7、图8所示,通过涡流制动,可以看到,速度由28m/s减为22.7m/s,消耗了34.3%的动能。
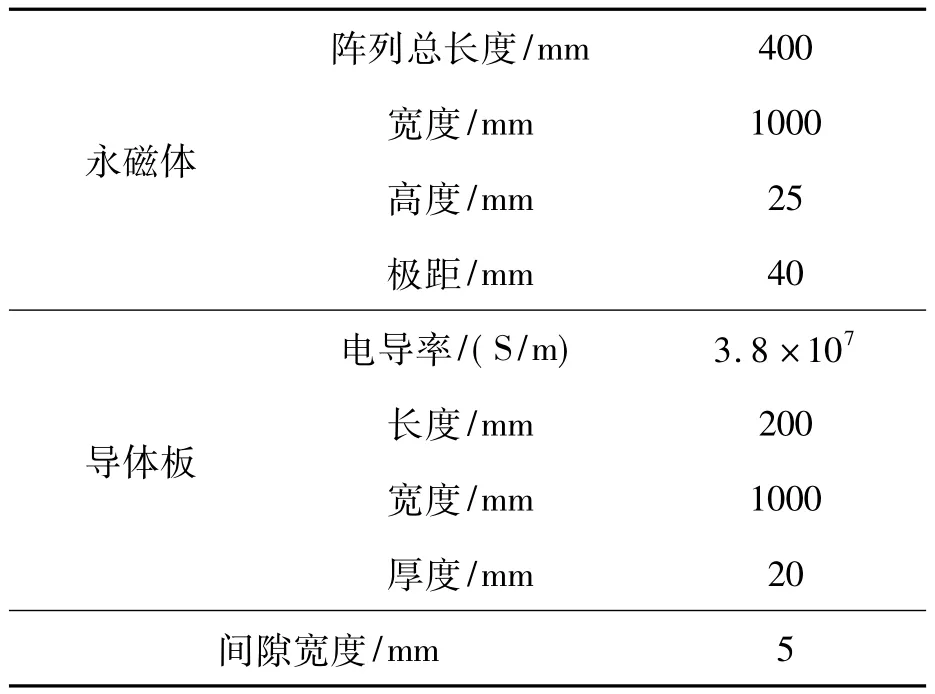
表2 涡流制动装置的参数Tab.2 Parameters of eddy current brake system
4 橡胶阻尼制动的分析计算
橡胶阻尼制动具有效果好、成本低、制动距离短的优点[12-14],它可以作为弹射台的最后一级制动方式。根据表3中的橡胶海绵板的参数特性,利用ANSYS进行仿真分析,设定条件为:开始冲击速度为30m/s,接触类型为表面接触,接触刚度因子为0.5,背向动子面为全节点约束(以保证海绵板受到撞击时位置不变),设置求解时间为0.5s,文件输出步数为20。选用LS-DYNA材料库中的2参数Mooney-Rivlin材料模型,定义接触类型为自动单面接触。
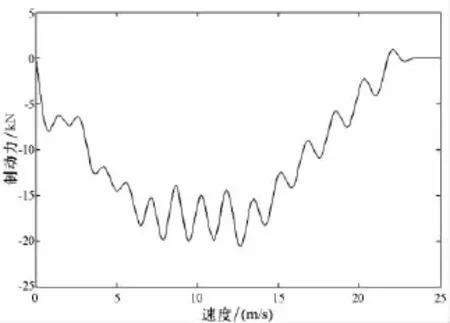
图7 涡流制动力随时间变化曲线Fig.7 Simulation result of eddy current brake force
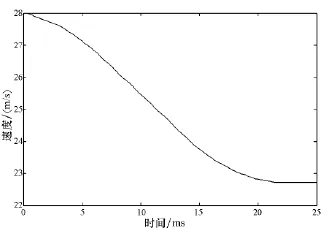
图8 速度随时间变化曲线Fig.8 Simulation result of speed ofmotion
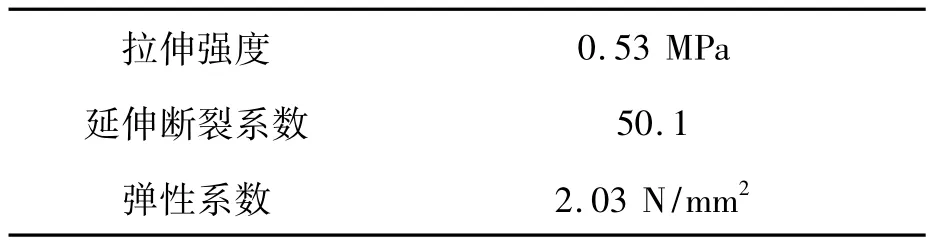
表3 三元乙丙(EPDM)橡胶海绵板参数特性Tab.3 Parameters of EPDM rubber damping
利用后处理器LS-PERPOST查看仿真结果,橡胶阻尼在碰撞过程中三个时刻的压缩变形情况如图9所示,图下方颜色条由右至左代表应力由大变小。
图9(a)为t1=0.05s时橡胶阻尼的碰撞变形情况,此时最大应力为525 054N;图9(b)为t2=0.1s时橡胶阻尼的碰撞变形情况,最大应力为258 718N;图9(c)为t3=0.2s时橡胶阻尼的碰撞变形情况,此时最大应力为246 335N。从图9中可以看出,随着碰撞深度的增加,最大应力值不断减小,动能被橡胶阻尼吸收,制动效果明显。制动速度曲线如图10所示,在t=0.404 2s时,速度为0。此时,橡胶阻尼达到最大压缩行程43.896mm,平均应力值为256 290N。
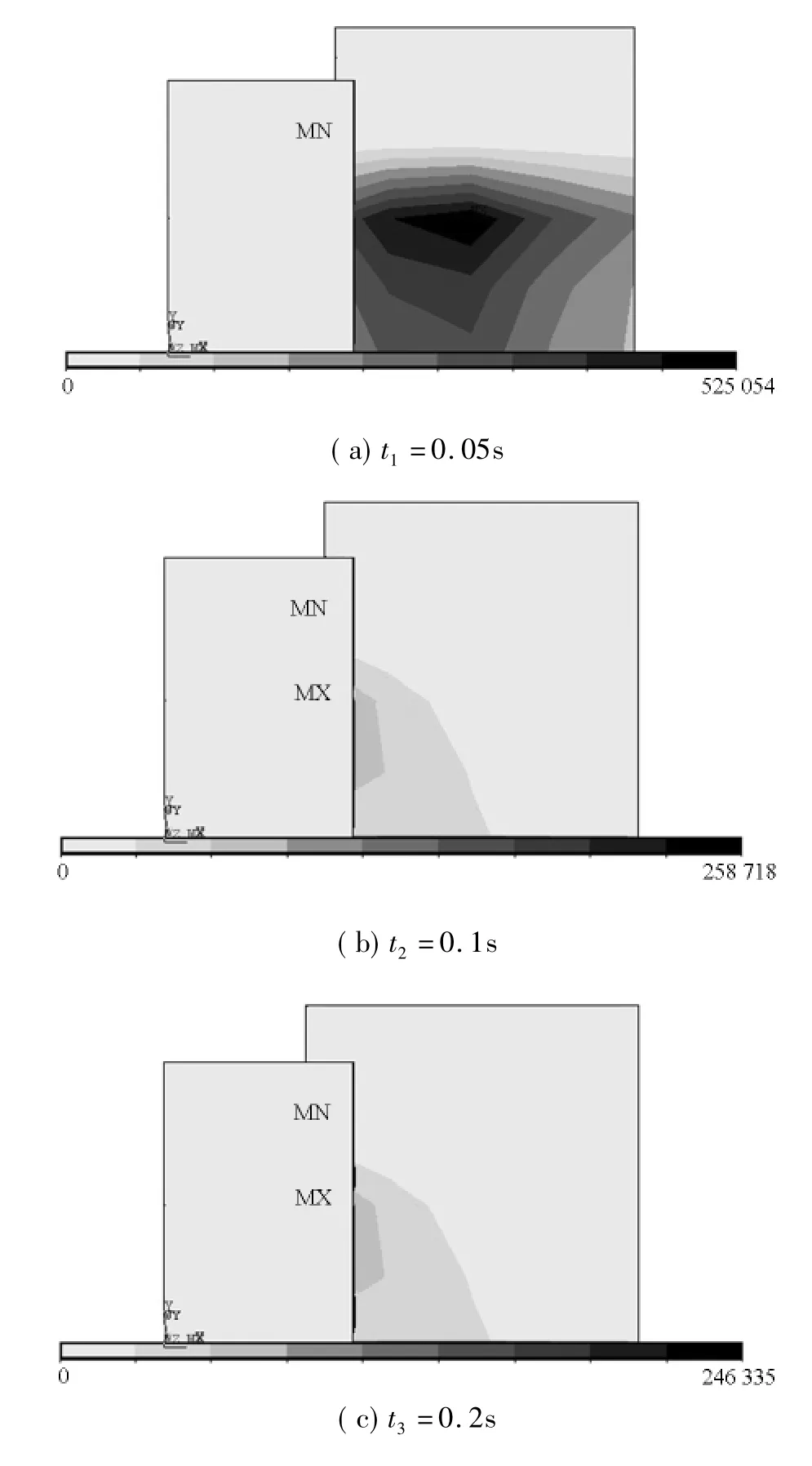
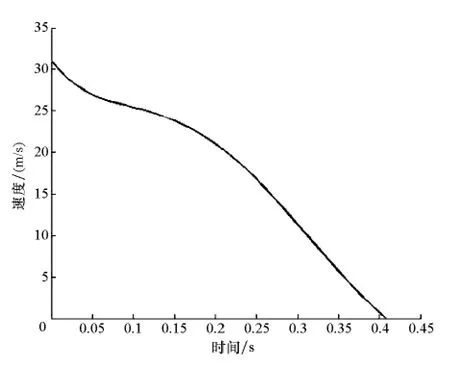
图10 碰撞过程中速度随时间变化曲线Fig.10 Collision simulation result of speed ofmotion
5 试验
利用综合制动方法实施制动,制动装置实物如图11所示,利用霍尔测速装置对电机运行过程中动子实时速度进行测量,测量结果如图12所示。可以看到,在电机运行的加速段,动子速度迅速加速至100km/h,采用吴峻等提出的综合制动方法,动子速度在0.3m制动距离内迅速降为0,达到预期要求。
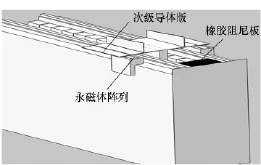
图11 综合制动示意图Fig.11 Diagram of hybrid brake experiment system
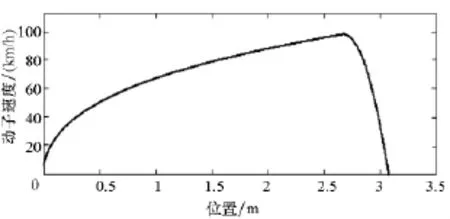
图12 综合制动方案下的速度曲线Fig.12 Speed ofmotion using hybrid break method
6 结论
1)当弹射台速度大于10m/s时,定子实铁心涡流制动产生的制动效果明显;当弹射台的速度低于3m/s时,定子实铁心涡流制动产生的制动力将迅速下降。
2)Halbach永磁体阵列的涡流制动方式在飞机分离点开始实施,可以增加30%以上的制动效果。
3)模型分析和碰撞试验结果表明,橡胶阻尼制动作为最后一级制动方式,能够有效吸收能量,实现较短距离内的制动。
References)
[1]冯密荣.世界无人机大全[M].北京:航空工业出版社,2004.FENG Mirong.Cyclopedia of world’s unmanned aerial vehicle[M].Beijing:Aviation Industry Press,2004.(in Chinese)
[2]于瀛,池建文,陈昕.电磁飞机弹射系统[J].舰船科学技术,2003,25(4):51-54.YU Ying,CHI Jianwen,CHEN Xin.Electronic magnetic aircraft launch system[J].Ship Science and Technology,2003,25(4):51-54.(in Chinese)
[3]Bushway R R.Electromagnetic aircraft launch system development considerations[J].IEEE Transactions on Magnetics,2001,37(1):52-54.
[4]郑金华.无人机战术运用初探[M].北京:军事谊文出版社,2006.ZHENG Jinhua.Preliminary study on tactical application of unmanned aerial vehicle[M].Beijing:Military Publishing House of Friendship and Literature,2006.(in Chinese)
[5]吴峻,赵宏涛,罗宏浩.电磁弹射过程中涡流引入阻力的分析[J].国防科技大学学报,2011,33(5):69-72,96.WU Jun,ZHAO Hongtao,LUO Honghao.Analysis of eddy current force in electromagnetic aircraft launch system[J].Journal of National University of Defense Technology,2011,33(5):69-72,96.(in Chinese)
[6]赵宏涛,吴峻.直线永磁无刷直流电机电磁制动方案设计[C].湖南省第二届研究生创新论坛优秀论文,2009: 43-46.ZHAO Hongtao,WU Jun.Brakingmethod design for a linear permanentmagnet brushless dc motor[C]//Proceedings of the Second Postgraduate Innovation Forum of Hunan Province,2009:43-46.(in Chinese)
[7]Stoll R L,Hammond P.Calculation of themagnetic field of rotatingmachines.Part 4:approximate determination of the field and the losses associated with eddy currents in conducting surfaces[J].Proceedings of the Institution of Electrical Engineers,1965,112(11):2083-2094.
[8]Jang S M,Lee S H,Jeong S S.Characteristic analysis of eddy-current brake system using the linear Halbach array[J].IEEE Transactionson Magnetics,2002,38(5):2994-2996
[9]王江波,李耀华,严陆光.直线Halbach磁体用于磁浮列车涡流制动的研究[J].电气传动,2010,40(5):8-11.WANG Jiangbo,LI Yaohua,YAN Luguang.Study on applying the linear Halbach array to eddy currentbrake system formaglev[J].Electric Drive,2010,40(5):8-11.(in Chinese)
[10]Zhang Z H,Shi L M,Li Y H.Characteristic analysis of linear eddy-current brake used in high-acceleration system[C]//Proceedings of2013 International Conference on Electrical Machines and Systems,2013:1971-1974.
[11]Kou B Q,Jin Y X,Zhang H,et al.Analysis and design of hybrid excitation linear eddy current brake[J].IEEE Transactions on Energy Conversion,2014,29(2): 496-506.
[12]许津恕.弹塑性碰撞的数值计算模型[J].大连轻工业学院学报,1986(1):72-77.XU Jinshu.Numericalmodel of elastic-plastic collision[J].Journal of Dalian Institute of Light Industry,1986(1):72-77.(in Chinese)
[13]郝长千,唐华平,聂拓,等.橡胶缓冲器接触碰撞有限元分析[J].现代制造工程,2009(3):63-65.HAO Changqian,TANG Huaping,NIE Tuo,et al.Finite element analysis of rubber buffer collision[J].Modern Manufacturing Engineering,2009(3):63-65.(in Chinese)
[14]杨臻,邱阳,薄玉成.利用弹塑性变形控制碰撞与接合[J].振动工程学报,2003,16(2):238-241.YANG Zhen,QIU Yang,BO Yuchen.Controlling crashconnection with elastic-plastic deformation[J].Journal of Vibration Engineering,2003,16(2):238-241.(in Chinese)
Hybrid brakemethod for electromagnetic launcher of unmanned aerial vehicle
WU Jun,YANGYu,ZHAO Hongtao,DENG Zhixiong
(College of Mechatronics Engineering and Automation,National University of Defense Technology,Changsha 410073,China)
Electromagnetic launcher for unmanned aerial vehicle(UAV)which utilizes linearmotor to accelerate in short distance is already a new trend for launching fixed-wing UAV.To brake shuttle in shorter distancewhen aircraft taking off,a hybrid brakemethod including solid stator eddy current brake,eddy currentbrake based on Halbach permanentarrays and rubber damping brakewas proposed and analyzed.When the speed of shuttle is above 10 m/s,it is notable for the brake bymeans of solid stator eddy current brake.In addition,when the speed of shuttle is below 3 m/s,the brake force induced by solid stator eddy current is decreased greatly.It can increase 30%brake force by Halbach permanent arrays eddy current brake.Bymodel analysis and collision experiments,rubber damping brake can absorb kinetic energy to brake shuttle in short distance as the final stage brake.
electromagnetic launcher;permanentmagnet linearmotor;eddy current brake;Halbach arrays;rubber damping brake
TM351;TM359
A
1001-2486(2015)05-061-06
10.11887/j.cn.201505010
http://journal.nudt.edu.cn
2014-12-06
国家科技支撑计划资助项目(2012BAG07B01)
吴峻(1973—),男,江西玉山人,研究员,博士,E-mail:junwu209@aliyun.com
