Workbench中常见振荡浮子的水动力虚拟实验研究*
2015-06-11赵知辛王方成牛建华
赵知辛,黄 兰,王方成,牛建华
(陕西理工学院,陕西汉中 723000)
0 引言
占地球表面积71%的海洋蕴藏着巨大的可再生能源,主要包括海洋风能、潮汐能、波浪能、海流能、温差能和盐差能等[1]。随着科技的发展和人们生活水平的提高,社会对能源的需求越来越大,波浪能的开发利用也得到了很多机构和学者的关注。国内外很多类型波浪发电装置已经开始投入使用。如美国Power Buoy点吸收式波力发电站[2]、葡萄牙的“海蛇号波能”发电装置(Pelamis)[3]和阿基米德悬挂式波能发电装置(Archimedes Wave Swing)[4]。广州能源所采用漂浮式振荡浮子技术研发了一种点吸收式波浪能转换装置,已完成海况实验[5-6]。
振荡浮子装置波浪能的开发与利用价值形式多种多样,比如为海上灯塔提供电能,为居住在远离海岸岛屿上的人们提供生活与工业用电和淡水,为海上气象浮标、海上灯船、石油平台体供电等[7]。振荡浮子式装置中,浮子捕获波能的高低将影响其能量的转化,所以浮子水动力分析研究对提高振荡波能发电装置中电能的转化效率具有重要的意义。海洋的动力响应主要分为波频响应、低频响应和高频响应三种。其中波频响应为一阶运动响应,主要由波浪直接作用在物体上引起;低频响应为纵荡、横荡和首摇三个共振响应,主要由波浪慢漂力、风力所产生;高频响应则为垂荡、横摇和纵摇三个共振响应,由高阶波浪效应引起的。波频响应和垂荡响应对浮子捕获波能的效率影响力较大。笔者通过ANSYS软件利用workbench中的Hydrodynamic Diffraction的模块对浮子进行水动力虚拟实验,研究波频响应和垂荡响应对浮子捕获波能的效率影响,并且对浮子进行优化,得到最佳尺寸。
1 物理模型的建立
1.1 模型的建立

图1 三种振荡波能浮子模型
常用的振荡波能浮子模型有三种,分别为圆柱型浮子、圆锥型浮子以及陀螺型浮子。利用Hydrodynamic Diffraction建立浮子的简单模型,在Geometry中的模型如图1。在建立模型时,模型以xy水平面分割成上下两部分,浮出水面的上部分(即分割的上部分)高度为出水高度h0,潜入水下的下部分(即分割的下部分)高度为吃水深度h1,水截面积的圆半径为R,圆锥角为2α。
1.2 物理模型的建立以及水域的参数
振荡波能浮子主要是利用波能的振荡转化自身的垂直运动而捕获波浪能。内部也有着复杂的机械转化结构,为了更好的与实际相符合,需要考虑惯性力和外力以及力矩。因此需要在Hydrodynamic Diffraction中需要设置模型的点质量。计算回转半径时,假设模型的质量全部集中在模型的底部,即下部分是用铁实心填充。这是符合实际情况,由于潜入水中的部分受到大部分的力,刚度和强度的要求比浮出水面部分要高很多,因此质量集中在底部,也有助于其的稳定性。同时随着吃水深度铁的密度ρ=7 850 kg/m3水的密度为ρ0=1 000 kg/m3。有关模型的点质量参数计算如表1所示。
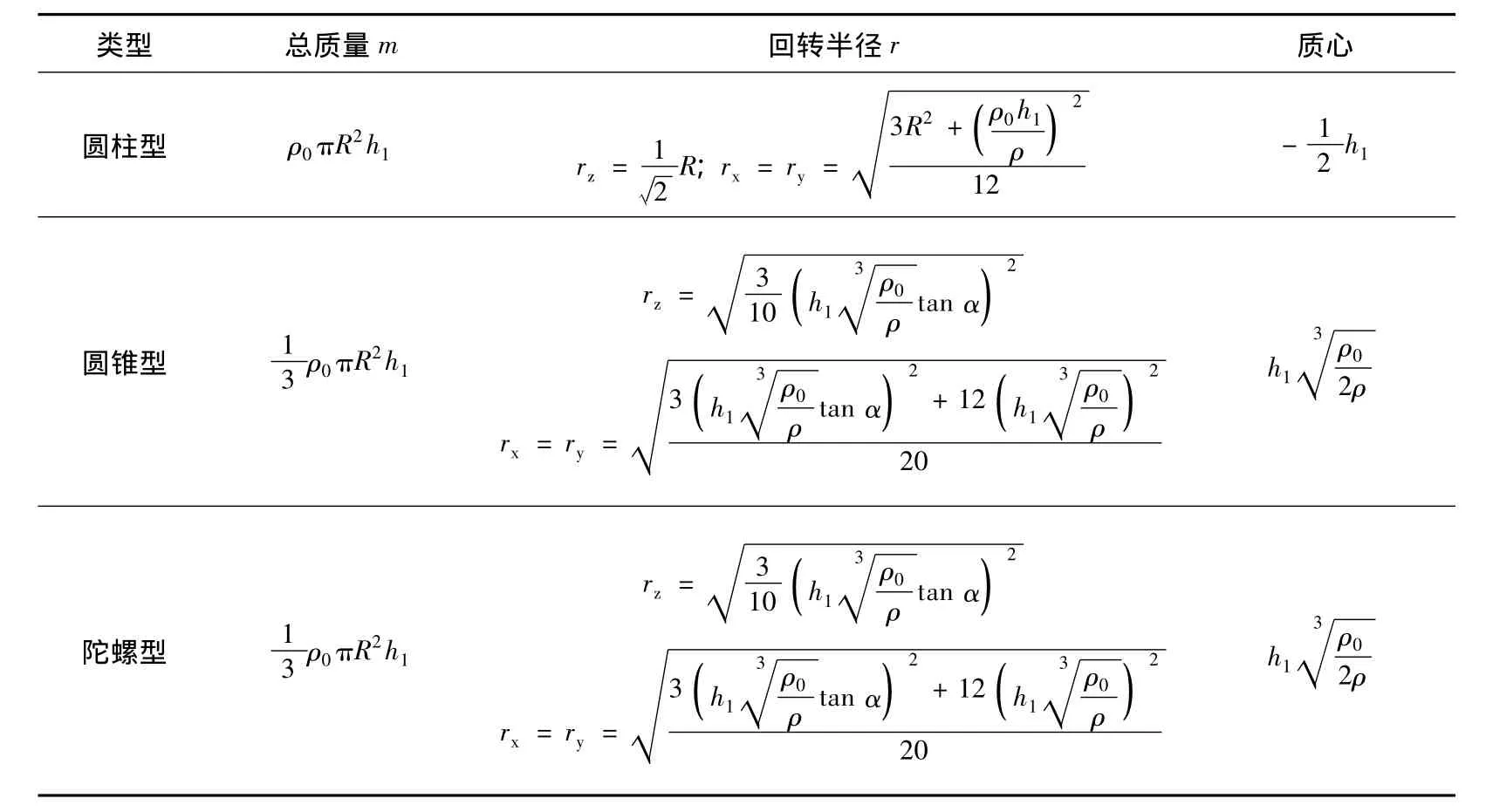
表1 模型的点质量参数计算

表2 水域环境参数
2 水动力虚拟实验
2.1 圆柱浮子与圆锥浮子的水动力分析
水上部分受到海平面风的作用力和少量海水的附着与冲击,其取值影响激励力的大小,主要对低频响的影响较大,而对Z方向上的激励力影响甚微,主要影响Z方向激励力大小的是其吃水部分的形状。设置波浪频率为0.2 Hz。在上部分取定值为0.6 m的情况下,研究吃水深度和圆锥角的改变对Z方向激励力的改变。通过文献[8]、[9]可知,水截面积的圆半径在1~2 m之间为较佳选择,在吃水深度为0.2~1.2 m的范围内,以步长为0.2 m来分析Z方向的激励力变化情况。如图2所示。

图2 圆柱型浮子和圆锥型浮子在不同吃水深度下产生的z方向上的激励力
其实图中得到的激励力是总的力在垂直于水平面即Z方向的平均分力,其实还要除以Z方向的吃水深度,所以得到的是Z方向每一米内的激励力。由于水下部分不可能是受力情况是均匀的,而为了方便比较因此得到的Z方向的力是平均力,而是得到一米的高度所受到的垂直方向上的激励力。在本文中为了好比较垂直方向的激励力大小,一下所说的都是每米的平均垂直方向的激励力。在Z方向上,圆柱型浮子受到的激励力随着吃水深度的增加而呈现出线性递减;圆锥型浮子受到的激励力缓慢减小,可见吃水深度对圆柱型浮子激励力影响较大。在满足质量轻、费料少、刚度以及强度的需求下,对实际海域中的圆柱型浮子优化首先应考虑其吃水深度。从图2中得到圆锥型浮子的捕获波能的性能要比圆柱型浮子高。
2.2 陀螺浮子的水动力分析
2.2.1 模型网格的划分
陀螺型浮子可以说成是由圆柱型和圆锥型浮子相结合成的组合型浮子。从图2可知,圆锥型浮子取吃水深度为0.6 m时,不仅满足费料少,而且不影响捕获波能的性能。从而设定陀螺型浮子的水上高度为0.6 m,吃水深度为0.6 m,水截面积的圆半径为1.6 m。因此建立如图3所示陀螺浮子,并对其进行网格的划分。节点数为6 812,元素数为6 810。最大尺寸为10 cm,变形公差为5 cm。

图3 陀螺浮子网格划分
2.2.2 水域中的水动力模拟
设置相同的水域环境,对Z方向的激励力求解。得到陀螺型浮子随波浪频率变化所产生的Z方向激励力。如图4所示。

图4 陀螺型浮子在不同波浪频率下产生的Z方向激励力
图4 中陀螺型浮子在0.2 Hz下的激励力是62 709.996 N,然而在下部分相同的圆锥型浮子是62 216.621 N。显然陀螺型浮子的激励力要大一些,可以看出,陀螺型浮子比圆锥型浮子捕获波能方面要强些。整体来看,陀螺型浮子在节省材料方面也优于圆锥型浮子。陀螺型浮子在波浪频率增加中,激励力反而下降。不同的波浪频率,获得的激励力大小也不同,因此对水域的考察很重要。特别是要在低波浪频率比较常出现的一些水域中放置才能有效的提高对波浪能的吸收。
打开此模块中model,设置相同的水域环境,进行网格的划分,在solution中添加3个Added Mass,分别设置x、y、z方向。点击solve求解,得到图5所示数据。

图5 陀螺型浮子在不同波浪频率下的附加质量
从图5中可知,在z方向上陀螺型浮子随着波浪频率其附加质量逐渐减小,说明波浪频率越高对其自身结构的影响越小。在x、y方向上的附加质量比较小,对其自身结构的影响小。如果波浪频率在0.1~1 Hz期间,z方向上的附加质量对其结构影响最大,同时随着频率的增加,其影响减小。
在solution中添加3个Radiation Damping,分别设置x、y、z方向。点击solve求解,得到图6所示数据。

图6 陀螺型浮子在不同波浪频率下的辐射阻尼
从图6中可知,波浪频率在0.5~0.63 Hz期间Z方向上所受到的辐射阻尼最大。在高频波浪下所受的Z方向辐射阻尼比较大,因此在高频波浪下,Z方向的激励力受到抑制。在x、y方向上所受到的辐射阻尼要远远小于Z方向的辐射阻尼,因此在此种情况下螺旋型浮子的摇摆力受到的抑制小。
3 结论
本文研究了振荡波能发电装置的常见浮子水动力分析及优化主要结论如下。
利用Ansys分析软件,通过改变圆锥型浮子和圆柱型浮子的吃水深度,总结得到圆锥型浮子的捕获波能的性能要比圆柱型浮子高;圆柱型浮子受吃水深度影响较大。验证了Ansys分析软件中的Hydrodynamic Diffraction模块的可靠性。
通过对陀螺型浮子进行水动力分析,总结出其捕获波能方面较强;在波浪频率增加中,激励力反而下降。在低波浪频率比较常出现的一些水域中放置才能有效的提高对波浪能的吸收;在高频波浪的海域中应该充分利用其摇摆运动进行发电。
[1] 邓颖北,熊 雯.海洋能的开发与利用[J].可再生能源,2004(3):70-72.
[2] 单长飞.单浮子式波浪能发电装置的水动力性能研究[D].镇江:江苏科技大学,2013.
[3] Yemm R,Henderson R,Taylor C.The PWP Pelamis WEC:Current Status and Onward Programmer.Proc 4th Eur Wave Energy Conf[C].Aalborg,Denmark.2000.
[4] Cruz J,Sarmento A.Sea State Character is Action of the Test Site of an Offshore Wave Energy Plant[J].Ocean Engineering,2011(34):34:763-775.
[5] Wu Bijun,Lin Hongjun,You Yage,et al.Study on two optimizingmethods ofthe oscillating type wave energy conversion devices[J].Acta Energiae SolarisSinica,2010,31(6):769-774.
[6] Su Y,You Y,Zheng Y.Investigation on the Oscillating Buoy Wave Power Device[J].ChinaOcean Engineering,2002,16(1):141-149.
[7] 李 伟,赵镇南,王 迅.海洋温差能发电技术的现状与前景[J].海洋工程,2004,22(2):105-108.
[8] 盛松伟,叶 寅.圆柱形波浪能吸收体水动力学分析与优化设计[J].太阳能学报,2013,34(3):543-546.
[9] 马 哲.振荡浮子式波浪发电装置的水动力学特性研究[D].西安:西安工程学院,2013.
