基于CFD的某汽车外流场数值模拟与分析*
2015-06-13雷荣华
雷荣华
(重庆交通大学机电与汽车工程学院,重庆 400074)
0 引言
近几十年以来,我国汽车工业飞速发展,汽车诸多性能得到了很大的提高,例如行驶稳定性以及乘员舒适性,同时又随着我国高速公路网的完善与道路质量的提升,使得汽车行驶速度有了提升的前提。但速度提升的同时,汽车的行驶阻力也越来越大。当汽车的行驶速度超过100 km/h时,气动阻力占总阻力的近80%[2]。当前,各大汽车厂商的研发部门对由传动系、发动机等的振动引起的噪声的传播机制研究得比较透彻,故振动噪声得到很好地控制[1]。但由气流而引起的气动噪声的控制还不够完善,使得气动噪声的研究成为汽车工业研究一个热点。
1 网格划分与前处理
流体运动要受物理定律的支配,满足以下三个流体动力学基本控制方程:
(1)连续性方程:



(3)能量方程:

《道路交通安全法》规定高速公路最高时速120 km/h,远低于声速的1/3(408 km/h),因此在对汽车外流场模拟时可以把周围气体当做不可压缩流体。
1.1 网格划分
原轿车在CATIA中建立了与实车1∶1比例的stl格式几何模型,忽略了雨刮器,门把手等,并对底盘进行平整,再导入STAR-CCM+中进行网格划分。设置计算域长度为10倍车长,宽度为9倍车宽,高度为5倍车高,长宽高分别为 42 m,15.3 m,8.5 m。为了获得汽车细小部位(如后视镜)的湍流形态,以车体为中心,选择切割体网格,由外到内逐步加密。为了节省CPU的运算时间,选取左侧半个计算域进行网格划分。最终生成的半车计算域网格数量为214万,如图1(a)与(b)所示。
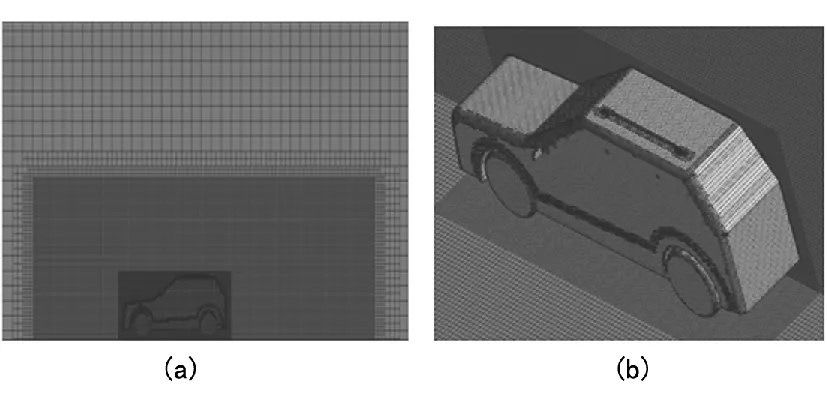
图1 计算域加密网格模型
1.2 物理模型的指定
采用定长,分离求解器,k-epsilon与 Reynold-Averaged Turbulence湍动模型,proundman宽带噪声源。
1.3 边界条件的指定
取车头方向所指的计算域端面为velocity-inlet,气流速度为车速;车尾方向所指的计算域端面为pressure-out,压强为0 Pa;车身表面和对称面为wall(no slip);顶面,侧面和地面为wall(slip);此处采取了移动地面的方法。
2 模拟结果分析
汽车阻力系数Cd的定义:

式中:F为空气阻力;ρ为空气密度;V为汽车速度;A为车身前方投影面积。分别设速度为30 km/h、45 km/h、60 km/h、75 km/h,100 km/h 进行模拟计算。经模拟结果与试验结果对比发现误差均在5%以内,符合精度要求。如,当速度为100 km/h时,Cd=0.337,与试验 Cd=0.334 相比,相差1.02%。各个速度工况下试验值与模拟值的对比情况如图2所示。

图2 风阻系数Cd试验值与模拟值
2.1 压强云图分析
图3 为汽车对称面压强分布云图。

图3 汽车对称面压强云图
由图3可知汽车前脸与后视镜向风部压强最大,来流空气与汽车前脸相遇,而使气流受到阻滞,气流流速降低,压强变大,因此形成了第一块正压区域[3]。汽车后视镜也形成局部小范围正压区域,因为后视镜是汽车突起物,在气流方向上的投影面积大,迎风面大。汽车尾部存在大片负压区,车体前后压差形成汽车行驶阻力。例如可增大后视镜的侧面倒角减低局部的压强,从而减低汽车前部压强。
2.2 表面声功率分析
图4为车身表面声功率云图。车身声功率可由车身声压计算得到,值的大小表明了单位时间向外辐射声能的能力[4]。从图中可看出,前脸、后视镜和A柱的声功率分布比较集中,辐射噪声的能力比较强。从前面对于压强云图的分析得知,汽车压强最大部位为前脸和后视镜处,因此,在压强梯度高、声功率值大的地方,产生的气动噪声的能力也较强。
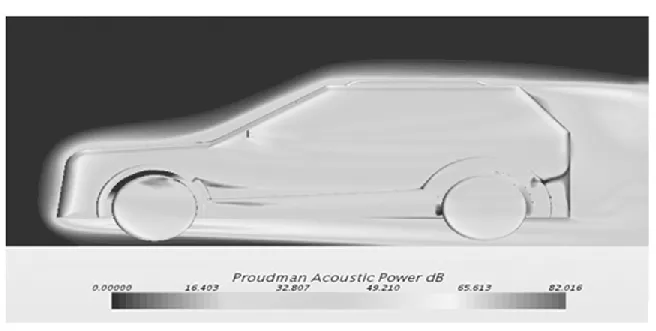
图4 车身表面声压云图
3 结论
(1)汽车前后的压差阻力主要源于汽车周围的压强分布,且车速越大,发动机克服的总阻力中气动阻力所占比例也越大。通过优化车身外形,减少汽车头部的压力或者升高汽车尾部的压力,都可以有效降低压差阻力,提高汽车性能。
(2)车身前脸、后视镜、A柱这些直接与高速气流相遇的部件,由于其边缘较小,是噪声的产生直接原因。调整前风窗玻璃处的倾角与后视镜的圆角大小,控制气流分离,因而降低噪声。
[1] 傅立敏.汽车空气动力学[M].北京:机械工业出版社,2006.
[2] 张式杰.汽车噪声分析与降噪措施及噪声测量方法[J].汽车实用技术,2011(2):55-60.
[3] 汪怡平.汽车风窗噪声与风振噪声的机理及控制方法研究[D].长沙:湖南大学,2011.
[4] 王 振.汽车外场气动噪声仿真与计算[D].株洲:湖南工业大学,2012.
