一种焊接残余应力磁测仪灵敏度系数标定的新方法*
2015-06-09巩建华丁克勤王洪柱
巩建华 丁克勤 王洪柱 陈 力
(1.中北大学信息与通信工程学院,太原 030051;2.中国特种设备检测研究院,北京 100029)
一种焊接残余应力磁测仪灵敏度系数标定的新方法*
巩建华1,2丁克勤2王洪柱2陈 力2
(1.中北大学信息与通信工程学院,太原 030051;2.中国特种设备检测研究院,北京 100029)
焊接残余应力的磁测法是近年来发展的一种新方法,研制的九极传感器磁测仪已经通过单向和双向加载方式标定了不同材料的灵敏系数值。根据等强度梁整个横截面所受应力值相等这一理论,提出了一种新的灵敏度系数标定方法,将传感器固定在等强度梁上,在不同应力情况下进行实验,将标定好的K值写入程序,直接在仪器上读取应力值,验证焊接残余应力磁测仪的可行性,使得磁测法检测残余应力更直接、合理、快捷、方便。
残余应力;灵敏度系数标定;等强度梁
0 引言
钢铁及其合金等铁磁性材料已被加工制造成许多机械设备的关键部件,在焊接过程中,由于热应力、相变应力、加工应力等超过屈服极限,以致冷却后焊件中留有未能消除的应力,而且这些设备长期在高温、高速、高载的条件下工作,很可能发生变形、产生裂纹,甚至造成巨大的损失,产生灾难性后果。因此,若能及时对这些焊缝进行应力检测,了解焊接残余应力[1-2]的大小及分布规律,一方面可以为后续的消除残余应力技术方案提供可靠的科学依据;另一方面对消除残余应力工艺后的焊缝进行应力检测,可掌握焊缝的应力重分布情况,明确处理后的效果,对提高焊缝的疲劳强度、保证构件的制作质量、满足结构的受力安全、保障设备可靠运行及人身安全有着重要的意义。
本文所用的磁各异性九探头残余应力磁测仪是一种高效、简单的检测仪器,具有工程应用价值,标定好该仪器的灵敏度系数在实际应用中十分必要,因此,提出一种新的方法,在等强度梁上进行灵敏度系数标定实验。
1 磁测法原理
1.1 磁测仪设计原理
本文所用的磁各向异性九探头残余应力磁测仪是根据磁测法[3]这一无损检测方法研制的,基于铁磁性材料的磁致伸缩效应,即铁磁性材料在磁化时会发生尺寸变化;反过来铁磁体在应力作用下其磁化状态(导磁率和磁感应强度等)也会发生变化,因此通过测量磁性变化可以测定铁磁材料中的应力。当试样内存在残余应力时,也会使磁畴的移动和转向均受阻而使磁化率减小,产生磁弹性现象。
1.2 传感器设计思路
该磁测仪所用传感器使用了一种九足磁测传感器,该传感器早在20世纪80年代一些学者已经研究提出构想[4-5],但因其易受到外界干扰,尚未得到实际应用。后来丁克勤、殷少华[6-7]等学者借鉴国内外传感器研制技术,自主研发了一种新型九极传感器,其磁测应力的思路与四探头相同,只是在得到主应力差(σ1-σ2)及主应力角时,探头不需要旋转,九极传感器中间极为激磁绕组,圆周八个极为感应绕组。九极磁测残余应力探头结构如图1所示。
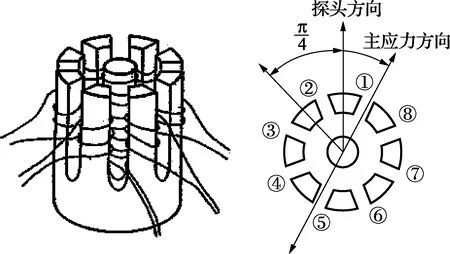
图1 九极磁测残余应力探头结构图
传感器脚①及脚⑤的线圈正向连接,脚③及脚⑦的线圈正向连接,①⑤③⑦组成差动连接,②④⑥⑧也为差动连接。当被测材料中没有残余应力时,八个极处在等磁位点上,此时输出电压为零;当被测材料有残余应力时,应力会使被测材料的各个方向的磁导率不一致,即产生了磁滞各向异性,各极所处的磁位不同,则通过各磁极的磁通就不一致,输出电压不为零。
实际测量时,它相当于①③⑤⑦极构成一个四探头传感器[8],测量探头与X轴成0°的磁信号与应力差的关系:
U0=K(σ1-σ2)cos2φ
(1)
②④⑥⑧极构成另一个四极传感器,测量探头与X轴成45°方向的磁信号[9]与应力差的关系:
U45=K(σ1-σ2)cos[2(φ+45)]
(2)
根据应力差σ1-σ2及φ与磁信号U0、U45的关系,可得到:
(3)
(4)
九极探头最大的优点在于测量时不需要旋转,根据资料显示和实际测量可知,探头在最大或最小主应力方向时,磁导率的变化率很小,即使借助探头定位器,也很难分别出微小的变化,而且测量误差一般都在±5°左右,而九极探头可以弥补这个缺陷。
2 实验方法
2.1 仪器介绍
磁各异性九探头残余应力磁测仪是由九极传感器、激励产生装置、信号采集模块及供电模块等组成,其设计测量原理如图2所示。

图2 磁测仪的测量原理
该磁测仪实物图片见图3,它的中央处理单元为嵌入式ARM9,采用液晶屏进行显示,这样能使测量值更直观地显示在用户面前,直观地读取应力值和主应力角,还能方便地对数据进行存储。为使磁测仪能显示出被测对象精确的应力值,要求该仪器的残余应力测量误差不超过±20MPa;灵敏度为1MPa,则标定好精确的灵敏度系数是十分必要的。
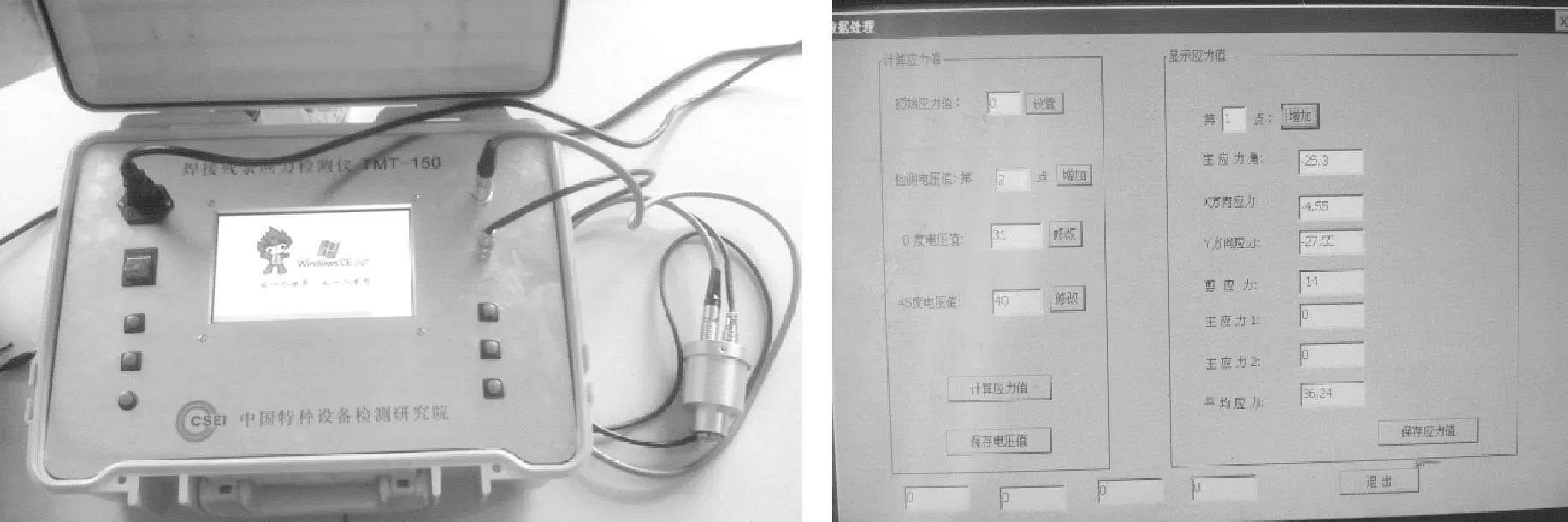
图3 磁测仪实物
2.2 等强度悬臂梁介绍
本实验选用一种新的灵敏度系数标定实验,将传感器固定在等强度梁上进行标定。等强度梁即整个梁的横截面上的最大正应力相等,并均达到材料的许用应力,等强度梁为悬臂梁式如图4。

图4 等强度悬臂梁
当悬臂梁上加一个载荷时,距加载点x距离的断面上弯矩为:
Mx=P·x
(5)
相应断面上的最大应力为:
(6)
(7)
(8)
式中:W为抗弯断面模量;断面为矩形,bx为宽度,h为厚度。
2.3 实验过程
实验时,我们在等强度梁上找一点,测得x=163mm,bx=45.5mm,h=5mm,将传感器的中间极—激励极对准梁的中间位置,用固定卡将其固定在等强度梁上,用两个万用表分别连接在电路板电压信号0°、45°信号的输出端进行电压信号测量,将不同质量的铁块悬挂在等强度梁的载重端使其发生形变,产生应力,利用磁各向异性原理通过传感器来感应等强度梁横截面上的应力变化,从而根据应力与电压的关系来标定灵敏度系数。
第一组实验将九极传感器固定在等强度梁上,分别加载不同的载荷,读取其输出电压信号,再与所加载载荷对等强度梁产生的应力值对应,由式(3)得所标定的灵敏度系数K为:
K=ΔV/σ
(9)
(10)
仪器设置了0°、45°的电压值采取选项,分别用V1、V2表示加载时0°、45°电压,V10、V20表示加载前仪器所示电压值,ΔV1、ΔV2代表加载后电压与加载前电压的差值。在等强度悬臂梁上加载不同载荷,记录实验数据并对实验数据进行处理,结果见表1,通过筛选有效数值,用最小二乘法对电压与应力的关系进行拟合见图5。

表1K值标定实验数据
(备注:加载前,V10=2.49V,V20=2.47V)

图5 电压与应力的最小二乘拟合
用最小二乘法进行二次拟合得到所需标定的K值,计算K值为6.7255,此实验重复测量,验证所标定K的准确度,将标定好的K值写入ARM程序,直接在仪器中读取应力值。为验证仪器是否达到了设计指标,我们进行了第二组实验。
第二组实验是将标定好的K值写入程序,分别在等强度梁上加载与第一组实验所加载相同的载荷,用仪器读取应力值和我们实际加载的载荷相比,来验证仪器的可行性及准确度。记录数据结果见表2。
将实验数据进行处理,绘制最小二乘法拟合直线及应力曲线图见图6。
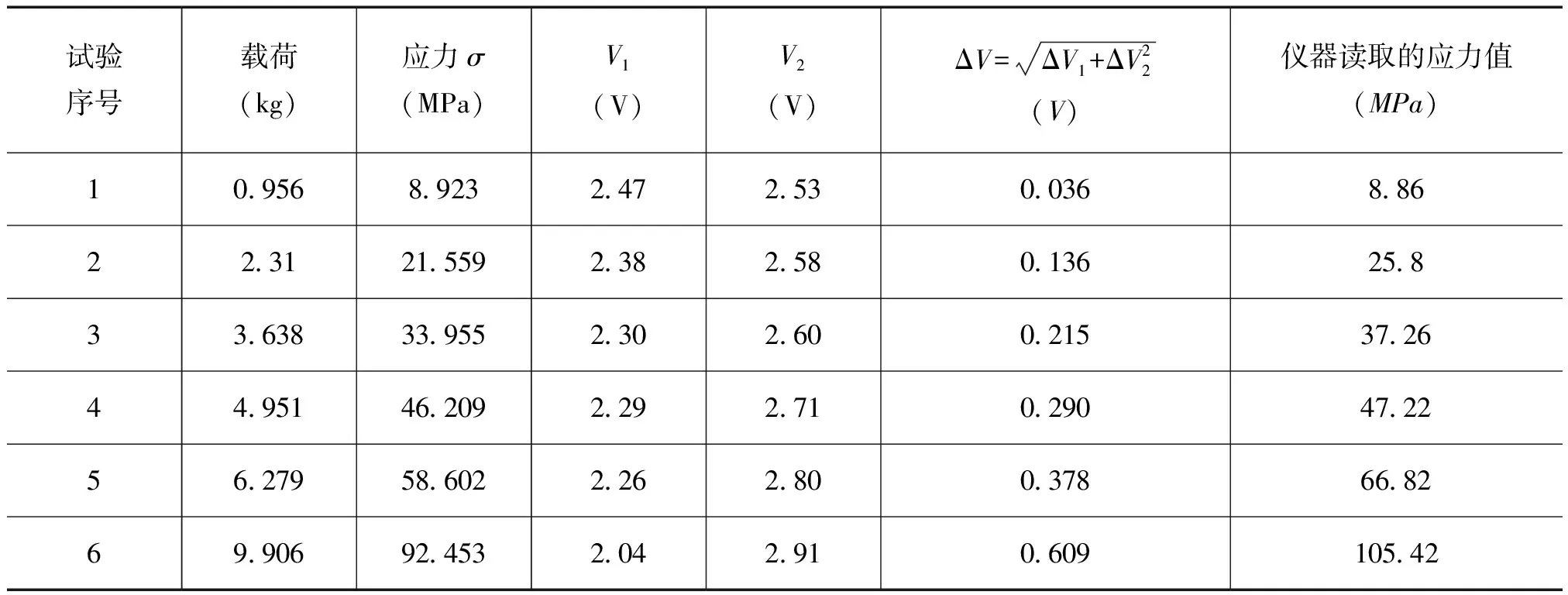
表2 应力值验证实验数据
(备注:加载前,V10=2.49V,V20=2.50V)
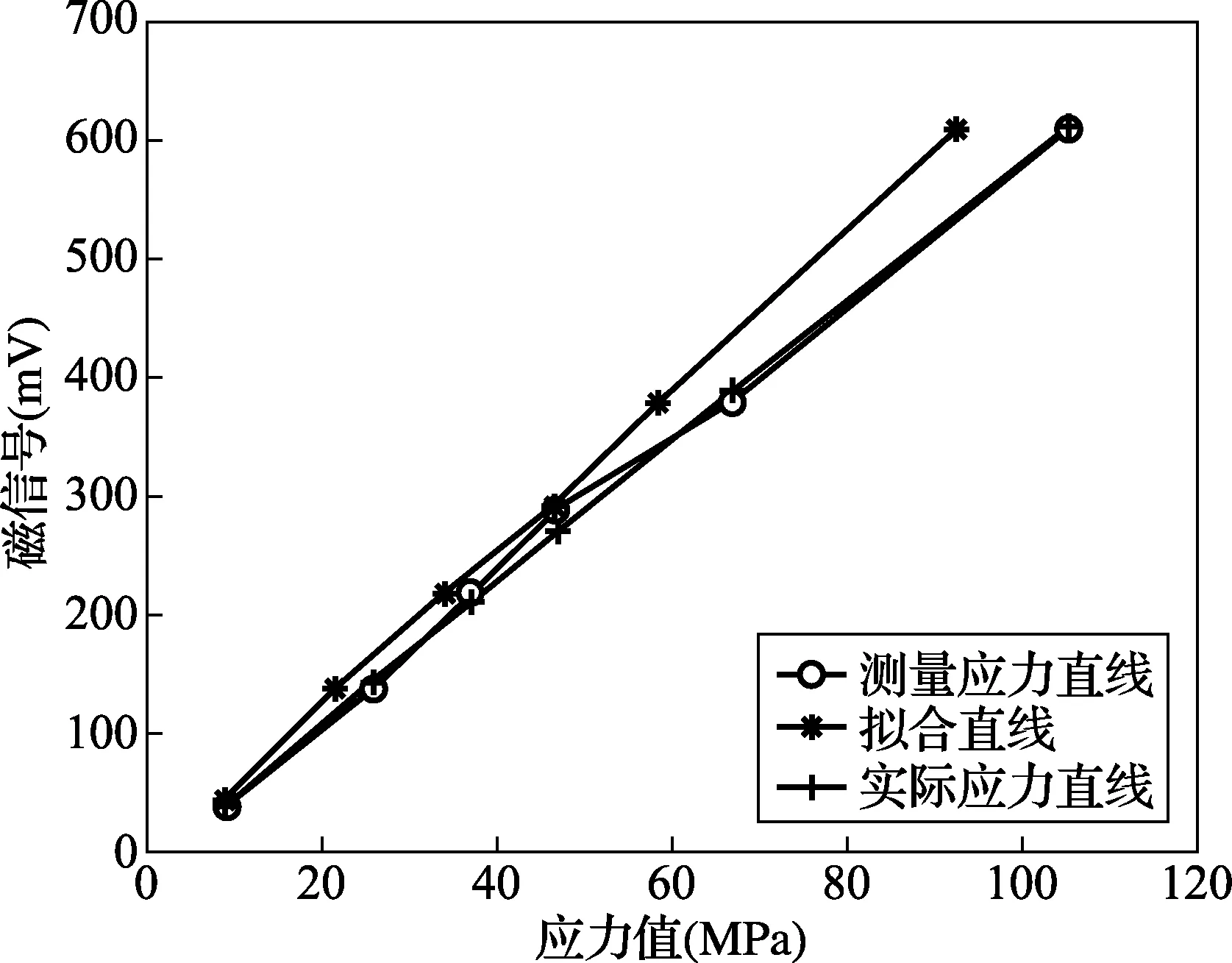
图6 应力曲线的比较
通过第二组实验可以看出,用仪器所测得的应力值与我们所加载的实际应力值相差不大,由于平时所需检测的管道、球罐等焊缝的残余应力值很大,所以我们仪器设计的最大误差不超过±20MPa,实验测量的差值没有超过仪器的最大误差值,可以从实验数据图中看出,测量的磁信号与所加载的应力值基本符合线性关系,验证了理论的可行性。
3 结论
本文通过理论分析以及实验验证,得出用等强度梁可以进行灵敏度系数标定实验, 通过重复实验验证与数据处理分析,发现测得的磁信号与应力值符合线性关系。在实验中,我们发现磁测仪能实时、快速、方便地读取应力值、各个方向磁信号的输出信号与主方向角的偏差值,且测得实验数据误差在仪器设计的误差范围内,得出自主研发的磁各向异性九探头残余应力磁测仪符合理论要求,验证了用磁测法来设计该仪器是可行的。
[1] 王振山,刘树桥.焊接小容器残余应力的磁性法测定[J].石化工炼油机械,1982,(6):8-16
[2] Kashiwaya K,Sakamoto H,Inoue Y.Residual stress measurement of induction hardened axle using magnetic sensor[J].Journal of NDI(in Japanese),1987,36(12):894-900
[3] 赵国君.磁测应力技术的研究现状及发展[J].黑龙江科技信息,2007(22):59
[4] 磯野敏雄,安福精一.九脚磁気プ口一ブによる残留応力測定.非破壊検査,1988(38):253-256
[5] 谢大吉.磁各向异性探头法检测残余应力的一种新模型[J].工程力学刊,1997,263-267
[6] 殷少华.球罐焊接残余应力的磁测仪器设计[C].2011远东无损检测新技术论坛论文集.杭州,2011:307-311
[7] 丁克勤,赵洲,陈平,王洪柱.磁各向异性九探头焊接残余应力测试技术研究[C].北京力学会第18届学术年会,2012
[9] Haishun Liu,Chaochao Dun,Linming Dou,Weiming Yang.Theoretical analysis of magnetic senor output voltage [J].Journal of Magnetism and Materials,2011(323):1667-1670
*质检总局科技计划应用技术研究类项目(编号:T2014-CSEI-0005)
10.3969/j.issn.1000-0771.2015.2.06
