差分算子和改进Otsu算法结合的灰度图像阈值分割研究与实现
2015-06-09杨新华吕意飞
杨新华,吕意飞
(1.兰州理工大学电气工程与信息工程学院,甘肃兰州 730050;2.甘肃省工业过程先进控制重点实验室,甘肃兰州 730050)
差分算子和改进Otsu算法结合的灰度图像阈值分割研究与实现
杨新华1,2,吕意飞1
(1.兰州理工大学电气工程与信息工程学院,甘肃兰州 730050;2.甘肃省工业过程先进控制重点实验室,甘肃兰州 730050)
在对二值化方法Otsu算法分析的基础上,提出一种差分算子与改进Otsu算法相结合的新算法。该算法通过差分算子保留原图的边界特征,然后再搜寻出与两类类内均值的平均值,并找出该平均值整数部分相等的阈值,确定一个符合Otsu准则的阈值,,然后将一个大的图像分割成若干小的块进行二值化。实验结果表明,该算法能够较好地保留原图的边界信息,有效地提高了低质量图像识别准确率。
Otsu;差分算子;边界特征;阈值分割
0 引言
图像分割是视觉图像处理中至关重要的一个环节,而图像分割算法的效率和质量则是决定整个识别系统的2个重要参数。目前,阈值分割方法简单、快速,尤其是其中的Otsu算法计算简单且自适应强而被广泛使用[1],但是传统Otsu算法并不适用于所有情况,尽管又有很多新的Otsu阈值分割方法被提出。例如:基于直方图的阈值分割算法[2]采用一维灰度直方图的传统Otsu法对低质量的图像进行分割,但是分割效果不佳,因此,提出了二维Otsu法[3-4],该算法采用穷举方法计算二维的最佳阈值因而运算量非常大,但难以满足图像识别系统的实时性要求。而文献[5]已经证明了一维Otsu阈值的性质,提出了可以快速搜索符合Otsu准则的阈值算法,该算法所得的阈值与传统的Otsu阈值相比更能准确地从梯度图像中分割小目标,但对于低质量图像阈值分割会使得边缘信息丢失。因此,需要一种不产生失真、耗时小又能处理低质量图像的方法[6],并能保留足够的边界特征信息。
针对以上存在的问题,文中提出了一种利用差分算子和改进Otsu算法相结合的算法。首先通过差分算子检测到图像灰度变化较为明显的地方,然后再搜寻出与两类类内均值的平均值,并找出该平均值整数部分相等的阈值,再把一个大的图像分割成若干小的块,在每一个小的块内用单阈值的方法进行处理。该算法能够很好的保留边界特征信息,并且对于雾天车牌图像后期的字符识别正确率有明显提高。
1 Otsu算法

(1)
(2)

(3)
(4)
(5)
最佳阈值k*的选取原则为
(6)
2 差分算子和改进Otsu算法的结合
文中以车牌图像的阈值分割为例进行分析。当车牌图像在光照不均匀、有缺陷、轮廓灰度变化等情况下,可能会使图像变得模糊,但此时图像内容边界线仍能可以识别出来。鉴于此,文中提出了一种利用差分算子和改进Otsu算法相结合的算法,能够较好地保留原图的边界特征。考虑到传统的Otsu算法计算量大,因此,在原有Otsu算法的基础上加以改进,通过减少对二阶矩的计算次数,进而提高计算效率。在符合原有Otsu算法的基础上提出了一个最佳阈值分割后两类类内均值的平均值,同时找出该平均值相等的整数部分,即
(7)
若最佳阈值k*唯一,则T′=k*;若k*取值为多个,则T′只取其中一个。
k*与T′分割图像结果相同,求解T′。令:
g1(k)=k
(8)
(9)
式中δ0(T′)和δ1(T′)为两类的灰度均值。

设T>T′有:
2i≤2T≤δ0(T′)+δ1(T′)i∈[T′+1,…,T]
(10)
即i-δ0(T′)>0,故
[i-δ0(T′)]2≤[δ1(T′)-i]2


w0(T)[δ0(T)-δ0(T′)]2+w1(T)[δ1(T)-δ1(T′)]2≥
(11)

由上面的式子知i∈[T′+1,…,T]
若对其中任意的i皆有pi=0,则有
(12)
若存在pi≠0,则有
(13)


(a)车辆
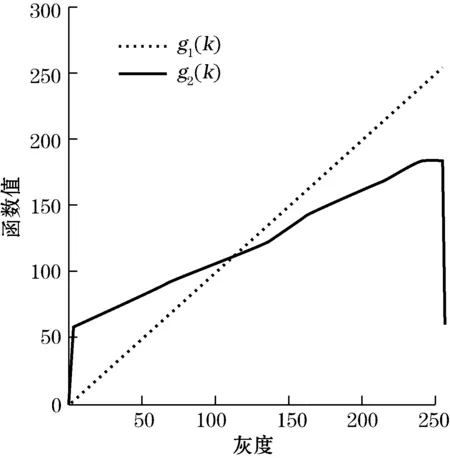
(b)g1(k)和g2(k)图1 车辆图像及其g1(k)和g2(k)
(14)
同理
(15)
那么一定存在
(16)
由此,使得类内方差最小的最佳阈值就等于它阈值分割的两类类内灰度均值的平均值。
上面的证明成立,在用差分算子检测图像的灰度变化明显的地方,再对这些像素点进行局部阈值分割,而对其他的像素点进行整体阈值分割,车牌识别系统的时效明显提高。由于在车牌识别中会受到很多干扰因素的影响,比如摄像机CCD在对车辆或者车牌拍照的时候可能在整幅图占到的比例小于10%时阈值分割性能退化,因此提出了一种经典的图像分割思想,即把一个大的图像分割成若干小的块,在每一个小的块内用单阈值的方法处理。在处理的过程中,每个小块内单阈值的选取是通过阈值选取的,相当于把图像分块和改进型Otsu算法阈值分割的方法结合使用。其具体的分割过程如图2所示。
3 试验结果分析
下面挑选了一幅雾天情况下的车辆图片作为实例,比较文中所提出的算法与其他几种经典阈值分割算法的性能。图3为该算法和其他两种方法二值化的实验结果,虽然探头内有光源,但不能保证薄膜的光照完全均匀,并且雾天拍摄的车辆图片存在很多干扰,此外相机的拍摄角度不同,而这些因素都会造成采集图像灰度分布的显著差异。所以在对图像二值化的过程中,采用全局阈值的方法很难将车牌从背景中完全地分割出来,(如图3(b)所示,采用Otsu的全局分割算法)。如果单一地使用Otsu算法丢失了很多的边缘信息,采用局部阈值的方法时,可以达到预期分割效果的同时也存在边界信息丢失及图片出现失真、伪影现象(如图3(c)所示,采用Bernsen的局部阈值分割算法),但是运算速度太慢,对单幅图像的处理大概需要5~7 s。图3(d)为利用文中算法分割结果。文中所采取的方法对于图像对比度较低的图片效果效好,还能很好地提取图片的边界信息特征,抗噪能力强。
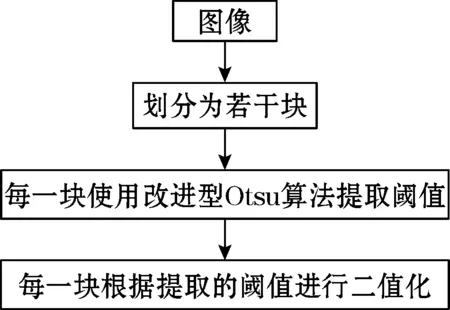
图2 分割图像过程

(a)原图

(b)Otsu全局分割算法结果

(c)Bernsen局部阈值分割算法结果

(d)本文算法分割结果
4 结论
文中提出的结合差分算子和改进Otsu算法,使用该方法的优点:
(1)用差分算子检测图像的灰度变化剧烈的地方,再对这些像素点进行局部阈值分割。这样就能够很好地保留低灰度目标的边缘特征信息;
(2)在符合原有Otsu算法的基础上提出了一个最佳阈值分割,通过搜寻出与两类类内均值的平均值,并找出该平均值整数部分相等的阈值,确定一个符合Otsu准则的阈值;
(3)把一个大的图像分割成若干小的块,在每一个小的块内用单阈值的方法处理,每个小块内单阈值的选取是通过改进的Otsu方法选取阈值。试验表明,相比原有的Otsu算法和Bernsen算法文中的算法求解阈值速度明显提高,对小目标及低质量和污染过的图像有较好的分割效果,还能保持原图像的边界特征从而便于车牌的后期处理。
[1] OTSU N.A threshold selection method from gray-level his to grams.IEEE Transactions on System Man and Cybernetic,1979,9(1):62-66.
[2] 邵立康,邹飞平.一种基于直方图的阈值分割算法.CT理论与应用,2009,18(2):66-77.
[3] 汪荣贵.一种新的自适应二维 Otsu图像分割算法研究.中国科学技术大学学报,2010,40(8):842-846.
[4] 张新明.二维直方图准分的Otsu图像分割及其快速实现.电子学报,2011,39(8):1778-1784.
[5] 许向阳,宋恩民.Otsu准则的阈值性质分析.电子学报,2009,37(12):2716-2719.
[6] 王强,马利庄.图像二值化时图像特征的保留.计算机辅助设计与图形学学报,2000,12(10):746-749.
[7] 陈强,朱立新.结合Canny算子的图像二值化.计算机辅助设计与图形学学报,2005,17(6):1302-1305
[8] 何志勇,孙立宁.Otsu准则下分割阈值的快速计算.电子学报,2013,41(2):267-272.
[9] FAN J L,ZHAO F.Two dimensional Otsu.s curve thresh-olding segmentation method for gray levelimages.ActaElectronicaSincia,2007,35(4):751-755.
[10] 汪海洋,潘德炉,夏德深.二维Otsu自适应阈值选取算法的快速实现.自动化学报,2007,33( 9) :968- 971.
Research and Implementation of Grayscale ImageThreshold Segmentation Based on Difference OperatorsCombined with Improved Otsu Algorithm
YANG Xin-hua1,2,Lü Yi-fei1
(1.Lanzhou University of Technology,Lanzhou 730050,China;2.Key Laboratory of Gansu AdvancedControl for Industrial Processes,Lanzhou 730050,China)
Based on binarization method of Otsu algorithm,a new methodology of combination of difference operator and improved Ostu was proposed.The boundary characteristics of the original image were retained by difference operator,and the mean of two classes partitioned was searched.The threshold equal to the integer part of the mean value can be found,thereby the threshold according to the Otsu rules was got,eventually a big image can be divided into a large amount of small blocks to binarize.The experimental results implicate that the approach can keep the boundary information from the original image well,which effectively improves the correct rate ofidentification of low quality images.
Otsu;difference operators;boundary characteristics;threshold segmentation
2014-03-14 收修改稿日期:2014-10-11
TP394.14
A
1002-1841(2015)03-0104-03
吕意飞 (1986— ),硕士,主要从事嵌入式系统应用和开发。E-mail:lgdqhb@163.com 杨新华( 1966—) ,教授,主要从事嵌入式系统应用和开发,电力电子与电力传动,计算机控制,无线通信等方面的研究。
