磁流变线控转向力反馈装置的设计与优化*
2015-06-09卢少波何耀斌胡林涛康学忠
卢少波,何耀斌,胡林涛,康学忠
(重庆大学,机械传动国家重点实验室,重庆 400044)
2015238
磁流变线控转向力反馈装置的设计与优化*
卢少波,何耀斌,胡林涛,康学忠
(重庆大学,机械传动国家重点实验室,重庆 400044)
基于线控转向系统的要求,设计了一种利用转子周面和端面混合工作模式的磁流变力反馈装置。提出了混合工作模式力矩模型及其磁路与结构设计方法,并运用有限元分析方法验证了理论设计方法的有效性。通过与周、端面单一模式对比分析表明,在产生相同力矩的情况下,混合模式可使结构更为紧凑;而为获得尽可能大的力矩,端面积与周面积比的合理范围在2~8之间。在特定条件下对装置进行优化的结果表明,混合模式力反馈装置能在质量较小的情况下,实现同等力矩要求的线控转向路感电机执行器的功能。
线控转向;力反馈装置;磁流变液;混合模式
前言
线控转向是将转向盘与转向轮之间通过控制信号连接的转向技术,该技术由于取消了转向盘与转向执行机构之间的刚性连接,导致无法直接传递来自路面及轮胎激励所产生的反馈力,故不存在“转向盘路感”和自回正特性。因此,线控转向系统需要通过特定的装置来实现转向盘路感模拟和转向盘的自动回正功能[1]。
目前,所研发的各类线控转向力反馈装置多以直流电机配合减速机构来实现[2],但电机执行器在匹配减速机构后的尺寸较大,且工作时有明显的刚性冲击,能耗较高。为了解决该问题,本文中提出了一种基于磁流变液的旋转式阻尼装置,以实现线控转向系统中的力反馈功能。由于磁流变装置具有反应灵敏、工作柔和及力矩可调范围广的特点[3],所以能更好地满足线控转向系统的工程实际需求。
根据现有研究成果,旋转式磁流变阻尼装置典型的工作形式表现为,仅以转子周面(即圆柱面)或端面间隙作为产生磁致力矩的工作区域[4],但这种单一的工作形式未能充分利用装置的材料性能。为进一步提高磁流变装置的材料效能利用率,相继出现了多盘式结构、蛇形筒式结构和多线圈组结构等改进结构[4-5],但这类结构比较复杂,增加了加工样机的制造成本。因此,本文中提出了一种同时利用转子周、端面的混合工作模式结构。为了进行理论分析,建立了混合模式的力矩模型,并提出其磁路设计方法。利用ANSYS软件,分别在关键结构尺寸不变和等磁动势条件下,对端面、周面及其混合工作模式的装置工作性能进行有限元对比分析,并在等体积条件下,分析混合模式周、端面积变化对力矩的影响,最后在特定工况下,对装置进行了优化。
1 力反馈装置的工作原理
图1所示为磁流变线控转向力反馈系统,它主要由转向盘、力反馈装置、回正装置、主控制器及传感器组成。驾驶员通过转向盘对系统输入转向信息(转向力矩和转角信息),由力矩传感器和转角传感器对转向信息进行收集并转化为数字信号,传递到主控制器中;主控制器通过预先设置的控制策略对转向信息和车辆行驶状态信息进行辨识,并将控制信号传到力反馈装置与回正装置中,使装置做出正确的反应动作,给驾驶员提供相应的路感信息。
从力反馈系统的组成可知,力反馈装置为力反馈过程中主要的组成部分,故将其作为本文研究重点。图2为力反馈装置的结构,它主要由转子总成、励磁线圈、导线、磁流变液和外壳组成。转子和转轴做成一体,中间有通孔用以引出导线;励磁线圈缠绕在转子的线圈槽中;转子总成与外壳同心,且两者之间为转动配合;转子与外壳之间的间隙充满磁流变液体,此间隙为磁流变装置的工作间隙。
力反馈装置利用外置导线对缠绕在转子上的励磁线圈施加电流,使励磁线圈周围产生磁场。通过在转子及其周围布置导磁和隔磁材料对磁力线进行引导,使磁力线垂直通过设计的工作间隙。调节电流大小可改变作用于磁流变液的磁场强度,磁场强度的变化会影响磁流变液的黏度,进而改变驾驶员转动转向盘时感受到的反馈阻尼力,向驾驶员传递车辆行驶状况信息。
2 装置力矩计算模型
为确定力反馈装置的初步设计参数,先要确定磁流变液的本构方程和装置的力矩模型。图3为力反馈装置的结构参数示意图,图中各参数符号及含义见表1。
2.1 磁流变液本构方程
在没有外加磁场作用的状态下,磁流变液符合Newton流体的本构关系。在施加外磁场后,磁流变液在极短的时间内(数毫秒)表现为Bingham流体,其本构方程为
(1)

2.2 以转子周面作为工作间隙的力矩模型
图4为典型的旋转式磁流变阻尼器结构,其主要特点是以转子周面作为工作区域。该结构通过在转子端面添加隔磁材料,使磁力线集中分布在转子周面处,提高转子周面工作间隙处的磁感应强度,从而增大该处产生的磁致力矩。
以转子周面作为工作间隙的结构形式,其产生的磁致力矩TH1可由下式计算得到[6]:
(2)
式中:L1为工作间隙的长度;R2为转子半径;R3为外壳内径。
2.3 以转子端面作为工作间隙的力矩模型
图5为旋转式磁流变阻尼器另一种常用的结构形式。该形式主要利用转子两端面作为产生磁致力矩的工作区域。该结构的特征是在转子周面添加隔磁材料,让磁力线集中从转子两端面处工作间隙通过,使转子两端面处成为产生磁致力矩的主要区域。以端面为工作面的结构形式,通常把转子做成扁平的盘状结构以减小装置轴向磁阻及其轴向尺寸和体积。
以转子两端面作为工作间隙的结构形式,其单个端面产生的磁致力矩TH2可由下式计算得到[7]:
(3)
式中:R2为转子半径;R5为转轴半径;T3为轴承安装空间。因转子有两个端面,故产生的总磁致力矩应为2·TH2。
2.4 周、端面混合工作模式的力矩模型
混合工作模式的结构如图2所示,磁力线从转子周、端面通过,同时以周、端面作为产生磁致力矩的工作间隙。因此,混合工作模式的力矩模型可综合周面和端面单一模式得到,由式(2)和式(3)可得
(4)
式中:τ1(B)为周面间隙平均磁致应力;τ2(B)为端面间隙平均磁致应力。
磁致应力大小可由磁流变液的τB-B关系获得。由于磁感应强度的分布情况随装置结构形式不同而变化,所以确定磁感应强度在周、端面工作间隙的分布情况是计算混合工作模式力矩大小的关键。
3 力反馈装置的设计
3.1 磁路设计
磁路设计的主要任务是确定工作间隙磁感应强度分布情况和计算装置所需磁动势以确定励磁线圈匝数,所以,建立准确的磁路分析模型对于初步设计至关重要。本结构中转子和外壳均采用45#钢,磁流变液采用重庆仪表厂提供的MRF-J01型磁流变液,45#钢及磁流变液电磁性能参数见文献[9]。
图6为混合工作模式磁路结构及其等效磁路图,等效磁路图中磁阻分别对应于结构图中各区域。混合工作模式的磁力线同时通过转子端面和周面区域形成闭合磁路,因此可把端面与周面磁路看作并联形式。为便于分析,将转子端面工作间隙区域磁路以线槽底部为分界线分成两部分考虑,如图6中区域3和7所示。
根据安培环路定律有:
∮Hdl=NI=Hl
(5)
式中:H为磁场强度;l为磁路平均长度;N为励磁线圈的匝数;I为通过励磁线圈的电流;乘积NI为线圈的磁动势。
由磁感应强度关系式B=μH和磁通量公式Φ=BS,得
(6)
由磁阻的定义可知:
当然,高等职业教育属于高等教育的范畴,高职院校的学生也是在校大学生的组成部分,同样是“校园贷”的目标群体,这些概念适用于高职院校。
Rm=l/(μS)
(7)
式中:μ为介质的磁导率;S为磁路的横截面积。由式(7)可计算磁路中各磁阻大小。
3.2 转子尺寸设计
根据文献[8],汽车行驶时,要求驾驶员作用在转向盘上的操纵力为50~100N,装备动力转向器时为10~20N。以普通级轿车转向盘为例,其直径一般为360mm,因此,最大转向盘边缘的转向力矩为
(8)
式中:F为最大操纵力;D为转向盘直径。根据磁流变液的τB-B关系曲线及初步确定的工作间隙磁感应强度,可得该型磁流变液对应的磁致剪切应力,结合图3和式(4)反复试算,确定装置初步结构尺寸如表2所示。

表2 磁流变力反馈装置初步设计尺寸参数 mm
设区域9平均磁感应强度为0.35T,励磁电流为2A,根据磁通连续性原理并联合式(5)~式(7)可算得区域3平均磁感应强度为0.275T,区域7平均磁感应强度为0.276T,总磁动势NI=180At,所需线圈匝数N=90。最后,根据表2所示尺寸参数计算得到力反馈装置理论产生的力矩大小为T=18.18N·m>18N·m。因此,初选的尺寸参数满足力矩设计基本要求。
4 力反馈装置力矩分析
4.1 初始参数有限元分析
为进一步验证初步设计方案的正确性,深入了解不同工作模式下装置的性能差异,按表2尺寸和以减小磁路磁阻为原则,在主要结构参数和磁动势相同的条件下,分别建立以转子周面或端面为工作间隙的单一模式ANSYS有限元模型和混合模式下的有限元模型。由于力反馈装置的轴对称性,故采用简化的二维平面电磁场分析方法,对3种工作模式进行有限元对比分析。
图7为周、端面单一模式下的磁力线分布情况。由图可知,由于存在漏磁现象,在周面和端面单一模式下,均有少量磁力线分别由端面和周面区域通过,但磁力线总体是按照预先设计要求分布。图8为混合模式下的磁力线和磁感强度分布情况。由图可见,磁力线能垂直且均匀地通过转子周面和端面工作间隙,只是相对单一模式而言,周面和端面磁力线略稀疏一些。另由磁感应强度分布图可知,装置最大磁感应强度出现在线圈槽底部,约为1.488T,小于45#钢的饱和磁感应强度1.5T,符合磁路设计要求。但外壳区域磁感应强度总体较小,大部分区域磁感应强度在0.8T以下,其分布明显不均,局部区域过度集中,表明该结构没能充分发挥材料的导磁性能,磁感应强度分布不够合理,还有待进一步优化改进。
部分数值结果整理如表3所示,混合工作模式产生的总磁致力矩为18.20N·m,与理论计算结果相近且符合装置力矩设计要求。另从表3可知,尽管混合模式下周面和端面间隙处的平均磁感应强度均低于单一模式下对应的周面或端面间隙处磁感强度,但由于混合模式下可用工作区域更大,其产生的总磁致力矩明显大于单一模式。该结果也表明,在产生相同力矩的情况下,采用周、端面混合工作模式,可使结构尺寸更小,能进一步提高材料效能利用率。
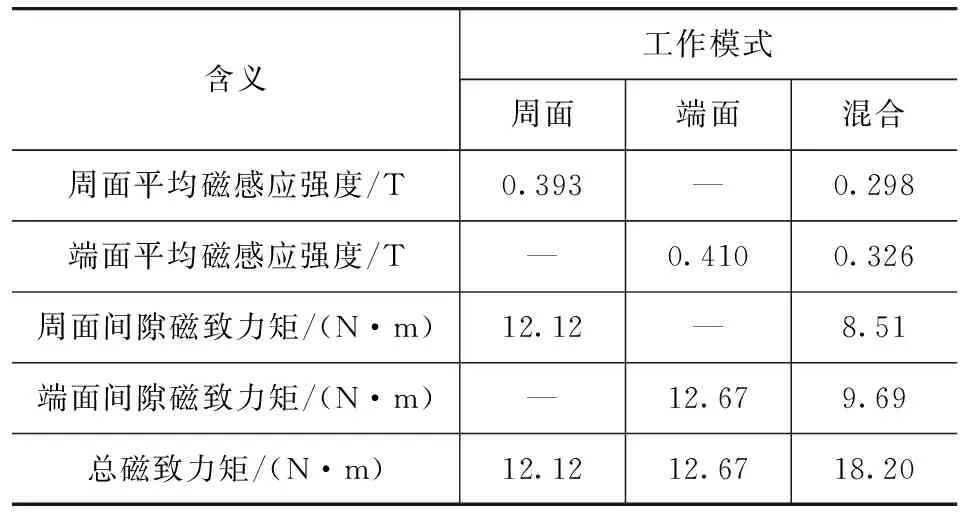
表3 有限元分析结果
4.2 混合模式力矩影响因素分析
由上述分析可知,在同等结构条件下,混合工作模式较周、端面单一工作模式具有较大的工作面积,能产生更大的磁致力矩,可更好地发挥材料的效能。但要让混合模式处于最佳工作状态,还须合理地匹配转子周、端面工作面积。
为确定混合工作模式周、端面积对力矩的影响,分别通过理论分析方法与有限元分析方法,在相同结构参数、装置体积(0.32 m2)及磁动势(198At)的条件下,只改变主要结构参数R2及L1的尺寸,建立一系列混合工作模式模型,定量分析了转子周面与端面间面积匹配关系对磁致力矩的影响。
图9为分析数据整理并通过三次多项式拟合的结果,图中虚线为理论计算结果拟合曲线。从ANSYS分析结果可知,Sd/Sc在2~8的范围时,TH值比较大(在18N·m以上),所以,在初步设计时,应尽量使初选尺寸的Sd/Sc值落在此区间内。
此外由图可知,当Sd/Sc<6.4时,理论结果与ANSYS分析结果较为相近;而当Sd/Sc>6.4时,ANSYS分析结果相对理论计算值明显衰减。这是因为随着Sd/Sc增大,图6所示的区域8逐渐出现局部磁饱和现象,使该处磁导率降低,阻碍磁通通过,减小了有效工作面积,导致磁致力矩迅速减小。而理论计算中难以估计装置局部磁饱和的出现,因此理论磁致力矩减小缓慢。
另外,由磁流变装置的结构特点可知,工作间隙对磁致力矩的产生也是至关重要的。为进一步研究混合模式下周、端面间隙G1,G2对磁致力矩的影响,按表2所示参数在等磁动势条件下,只改变G1,G2大小(0.5≤G1≤2,0.5≤G2≤2),建立一组有限元模型并进行求解,得到磁致力矩在G1,G2变化时的响应面,如图10所示。
由图10可知,在等磁动势条件下,随着G1,G2的增大,磁致力矩逐渐减小,且G1,G2对磁致力矩的影响相当。由磁路分析可知,周或端面间隙增大会导致磁路局部磁阻增大,使该处间隙磁感应强度减弱,从而降低磁致力矩。但工作间隙越小对装置的加工及装配精度要求越高。考虑成本因素,工作间隙一般取1~1.5mm比较合适。
5 力反馈装置优化实例
在全球节能减排的大环境下,为进一步实现装置的轻量化,本文中以装置总体积最小化为目标,在3.2节所述要求前提下,选取关键尺寸参数为设计变量,建立其参数化模型并进行优化分析,以期得到更为合理的结构尺寸参数[9]。优化分析中具体设计变量、状态变量及其初值和取值范围见表4和表5;其中,设计变量范围的选取主要采用反复试算并根据实际加工和安装的要求确定。

表4 设计变量

表5 状态变量
图11所示为通过一阶优化计算得到的力反馈装置磁感应强度分布情况。由图可知,磁感应强度最大的区域同样出现在线圈槽底部约为1.498T,仍满足磁路设计的要求,但优化后的外壳侧面区域磁感应强度普遍在0.99T以上,可见,材料效能利用率得到进一步提高。
表6为优化前后各主要参数对比情况。由表可知,优化后装置产生的总磁致力矩为18.44N·m,符合力反馈装置的使用要求;其次装置各尺寸参数都有不同程度的减小,使装置总体积减小了44.8%,仅为180 167mm3,优化效果显著。按照钢的密度计算,装置总质量约为1.4kg,在同工况下,与一般路感电机匹配减速器后的总质量相比具有一定优势。另外,优化后的Sd/Sc值为2.97,符合Sd/Sc在2~8范围时得到最佳力矩值的规律。
6 结论
根据特定线控转向系统的操纵动力学要求,提出了一种针对线控转向系统的磁流变力反馈装置,在其设计与优化的过程和结果中得出以下结论:

表6 优化前后结果对比
(1)提出的混合工作模式力反馈装置克服了周面或端面单一工作模式的缺点,更能充分利用材料的性能,且其结构简单,容易加工制造;
(2)根据力反馈装置的结构特点,提出了适用于混合工作模式磁流变阻尼装置的力矩模型及磁路与结构设计方法。通过有限元分析结果验证,该方法对于力反馈装置的初步设计是有效的;
(3)由混合模式力矩与Sd/Sc的拟合曲线关系可知,Sd/Sc值的最佳范围为2~8;
(4)由ANSYS优化分析结果可知,在满足线控转向系统的前提下,与路感电机执行器相比力反馈装置具有一定优势。
[1] 周聪,肖建. 汽车线控转向系统的研究现状与发展[J]. 控制工程, 2012, 19(5):827-831.
[2] 张俊岩. 轻型汽车线控转向系统电机匹配及控制策略研究[D]. 长春:吉林大学, 2008.
[3] 蒋建东, 梁锡昌, 张博. 适用于车辆的旋转式磁流变阻尼器研究[J]. 汽车工程, 2005, 27(1):77-82.
[4] Fitrian Imaduddin, Saiful Amri Mazlan, Hairi Zamzuri. A Design and Modelling Review of Rotary Magnetorheological Damper[J]. Materials and Design, 2013, 51:575-591.
[5] Nguyen Q H, Choi S B, Lee Y S, et al. Optimal Design of a New 3D Haptic Gripper for Telemanipulation, Featuring Magnetorheological Fluid Brakes[J]. Smart Materials and Structures, 2013, 22:1-17.
[6] Alireza Farjoud, Nader Vahdati, et al. Mathematical Model of Drum-type MR Brakes Using Herschel-Bulkley Shear Model[J]. Journal of Intelligent Material Systems and Structures,2008,19:565-572.
[7] Assadsangabi B, Daneshmand F, Vahdati N, et al. Optimization and Design of Disk-Type MR Break[J]. International Journal of Automotive Technology, 2011,12(6):921-932.
[8] 《汽车工程手册》编辑委员会. 汽车工程手册.设计篇[M]. 北京:人民交通出版社, 2001.
[9] 李以农, 潘杰锋, 郑玲. 磁流变阻尼器的有限元参数优化设计[J]. 重庆大学学报, 2010, 33(5):35-40.
Design and Optimization of MR Fluid-based Force Feedback Devicefor Steering-by-Wire
Lu Shaobo, He Yaobin, Hu Lintao & Kang Xuezhong
ChongqingUniversity,StateKeyLaboratoryofMechanicalTransmission,Chongqing400044
Based on the requirements of steering-by-wire (SBW) system, a magneto-rheological (MR) fluid-based force feedback device with a hybrid mode utilizing the magnetic flux of both circumferential and end surfaces of motor rotor is designed. The torque model for hybrid mode and the design method of magnetic circuit and structure are proposed with their effectiveness verified by finite element analysis. Comparative analysis between single modes and hybrid mode demonstrates that under the condition of the same torque produced the device with hybrid mode has a more compact structure, and for obtaining a torque as large as possible, the reasonable ratio of the end surface area over the circumferential surface area is in a range of 2 to 8. The results of an optimization for the device in a specific condition indicate that the force feedback device with hybrid mode can realize the function of motor actuator for the road feel of SBW, meeting the same torque requirement with a much less mass.
SBW; force feedback device; magneto-rheological fluid; hybrid mode
*国家自然科学基金(51005256)、汽车专项(CDJZR13280074)和中央高校基本科研业务费(CDJZR12280011)资助。
原稿收到日期为2013年12月27日,修改稿收到日期为2014年7月30日。
