某型混合动力汽车协调换挡控制策略的研究*
2015-06-09梁俊毅张建龙殷承良
梁俊毅, 张建龙, 殷承良
(上海交通大学,汽车电子控制技术国家工程实验室,上海 200240)
2015231
某型混合动力汽车协调换挡控制策略的研究*
梁俊毅, 张建龙, 殷承良
(上海交通大学,汽车电子控制技术国家工程实验室,上海 200240)
本文针对一款装有机械式自动变速器和后驱电机的混合动力汽车开发了协调换挡控制策略,对车辆冲击和离合器摩擦损失进行优化。控制策略将换挡过程分为发动机主动调速、离合器接合和恢复并联驱动3个阶段。采用模糊PID控制器和模糊控制器分别进行发动机转速调节和离合器接合速度调节,并用电机对动力系统转矩波动进行补偿。仿真和台架试验结果,采用虽然该协调控制策略虽然换挡时间相对延长,但能同时减小车辆冲击和离合器摩擦损失,将冲击度控制在±4 m/s3范围内,并只产生很小的离合器摩擦损失,汽车的换挡品质得到明显改善。
混合动力汽车;协调换挡控制策略;车辆冲击度;离合器摩擦损失
前言
随着环境污染的逐步加剧和能源问题的日益凸显,汽车工业界和研究机构纷纷加大了对新能源汽车的研发力度。混合动力汽车(HEV)由于采用与传统车辆类似的结构和对基础设施的良好适应性,因此被认为是中短期内一个较好的选择方案[1]。
目前,关于HEV瞬态协调控制的研究内容相对集中于模式切换(如由纯电动模式切换至混合驱动模式)[2-3],而针对换挡时瞬态协调控制的研究相对较少[4-5]。研究人员在针对HEV换挡进行优化时通常需要同时兼顾几个目标,包括换挡时间、离合器磨损和车辆冲击度。这几个优化目标常常相互制约:较快的换挡需要加快离合器的接合,以减少动力中断和离合器磨损,但可能导致较大的车辆冲击。而要提高驾乘舒适性,需要相对延长换挡时间,可能导致更多的离合器磨损。
之前的研究通常采用加权目标函数对冲击度和离合器磨损进行折中优化[6],或忽略磨损而集中优化HEV车辆冲击度[7],很难同时实现两个目标的优化。本文中针对一款发动机及变速器集成于前驱动轴,电机集成于后驱动轴的HEV进行研究,设计了针对1挡升2挡的换挡协调控制策略。由于采用后置电机结构,在换挡时电机可持续提供车辆行驶所需功率。因此,动力中断问题得以解决,换挡时间可以相对延长以减小车辆冲击并通过发动机主动调速来减少离合器的磨损。
模糊逻辑控制器为非线性、时变、动态和延时系统提供有效的控制,因为它能方便地获取人类认知中近似和定性概念,并将推理机制引入控制器中[8]。本文中采用模糊PID控制器和模糊控制器分别控制换挡时的发动机转速调节和离合器接合速度调节,以期获得较好的协调控制品质。
1 HEV混合动力系统架构
本文中所研究的并联式HEV主要针对中低端市场,其动力性能见表1[9]。
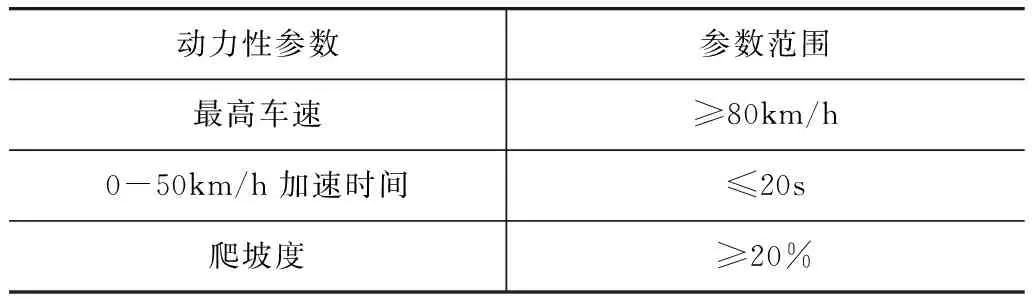
表1 并联式HEV动力性能参数
该并联式HEV的动力系统采用发动机与自动机械变速器(AMT)置于前驱以及电机置于后驱的结构,如图1所示。HEV的系统参数见表2。
2 换挡过程动力学方程
混合动力汽车动力系统是复杂的非连续系统。为了简化分析,将动力系统各部件假设为集中惯量部件。本文中着重分析与换挡过程相关的动力学方程。
如图1所示,由于发动机通过离合器与变速器输入轴相连,故换挡过程中(在离合器完全接合前)前驱动的动力学方程可表达为
(1)
式中:Jeng为发动机系统的惯量;ωeng为发动机的角

表2 并联式HEV动力性能参数
速度,rad/s;Teng为发动机的输出转矩,其值等于发动机的指示转矩Teng_i减去发动机阻力转矩Tres;Tclt为离合器传递的转矩。Tres可表示为[10]
(2)
式中:Vd为发动机的排量,m3;neng为发动机转速,r/min; vp为发动机活塞的平均速度,m/s。
在AMT系统中通常使用干式离合器。换挡过程中干式离合器有分离、滑摩和完全接合3种状态。对应不同状态离合器传递转矩的方程为
(3)式中:Tclt_out和ωclt_out为离合器的输出转矩和角速度;Tclt_in和ωclt_in为离合器的输入转矩和角速度;μst和μsl为离合器摩擦盘的静态和滑动摩擦因数;Rcl为等效摩擦半径,m;Fn为作用在摩擦盘上的法向力;N为摩擦面数。
考虑到变速器轴存在刚度和阻尼特性,故其动力学方程为
(4)

3 协调换挡控制策略
本文中针对目标HEV车型1挡至2挡的升档过程进行协调控制优化。由于换挡过程中离合器的状态改变,该换挡过程可分为3个连续的阶段。每个阶段都有设计针对性的控制策略来实现最终车辆冲击度和离合器磨损的优化。在换挡指令发出前,HEV工作在并联混合驱动模式,此时前轴的发动机和后轴的电机共同驱动车辆。在换挡指令发出后,离合器开始分离而发动机到变速器输入轴的动力链断开。此时,位于后轴的电机可持续提供车辆所需的功率,从而避免了动力完全中断。在此情况下,离合器的分离时间可以相对延长,发动机可以进行主动调速而减少离合器磨损。
换挡的3个阶段和切换条件如图2所示。为方便,本节中发动机和离合器的旋转速度改用转速n(r/min)表示;与第2节中的角速度ω(rad/s)的关系为n=30/π(对所有下标有效)。当离合器输入端和输出端的相对转速nclt_dif降低至门限值nII_entry时,换挡过程进入第二阶段,离合器开始接合并产生滑摩。当nclt_dif降低至某一较小的门限值nIII_entry时,换挡过程进入第三阶段,离合器完全接合,HEV重新进入混合驱动状态。

由于换挡过程中不同阶段的车辆部件动力学状态会发生变化,因此本文中针对不同阶段分别设计了对应的控制方法,具体详述如下。
3.1 第一阶段:发动机主动调速
当换挡命令发出后,离合器开始分离以完成挡位切换。在传统车辆中,为避免长时间的动力中断,离合器分离时间较短并很快开始重新接合。本文中所研究的HEV结构中,置于后轴的电机可以持续提供驱动功率。因此,离合器的分离时间可以相对延长。此时,式(1)中的离合器转矩Tclt为0,发动机可以通过调整节气门开度来进行主动调速。由于1挡与2挡速比不同,在主动调速的最初阶段,发动机转速neng要远高于下一挡位对应的目标转速neng_t。
发动机转速的调节由调整节气门位置αtht来实现。经典的PID控制器被用于实现αtht的调节。因为节气门的位置不会发生突变,因此在设计PID控制器时,将节气门开度的变化量Δαtht作为PID控制器的输出,其表达式为
(5)
式中:e=neng_t-neng为发动机目标转速与实际转速的差值;Kp,KI和KD分别是比例、积分和微分系数。由于发动机和离合器的强非线性动态过程,普通的PID控制器有可能不能满足追踪精度和相应速度的要求。因此,本文中采用模糊控制器对PID参数进行调节来增强控制器的性能。模糊控制器的设计方法与文献[7]类似,本文中不再详述。
3.2 第二阶段:离合器结合
当nclt_dif小于门限值nII_entry时,换挡过程进入第二阶段而此时离合器开始接合。在这个阶段,离合器的接合须要仔细控制以减小车辆冲击和离合器的摩擦损失。离合器的摩擦损失由离合器滑摩过程中耗散的能量来表征:
(6)
式中:tsilp为离合器滑摩的时间。在这个阶段,离合器转矩Tclt的增加与离合器的接合速度有关。另一方面,实验表明离合器的摩擦损失与滑摩时间呈正相关[6]。因此,离合器过快的接合会引起传动系较大的转矩波动而影响驾乘舒适性,而太慢的离合器接合速度则会造成较多的离合器磨损。


表3 离合器接合速度模糊逻辑规则表
3.3 第三阶段:恢复并联驱动
当nclt_dif降低至一很小的值nIII_entry时,换挡过程进入第三阶段而离合器完全接合。发动机重新接入传动系与电机一同驱动车辆。由于发动机动态响应速度相对较慢,则控制发动机转矩Teng逐渐增加至其高效率转矩曲线,而电机同时提供辅助功率保证驾驶员的驾驶需求。
4 仿真分析
在Matlab/Simulink仿真平台上建立了混合动力汽车的动力学仿真模型和换挡协调控制策略,并根据ECE工况选取一段典型加速曲线,如图4所示。采用设计的协调控制策略和未进行协调控制的策略进行仿真。需要说明的是,考虑到换挡过程中电机的功率有可能不能满足此时驾驶员的需求,因而根据换挡时电机功率是否满足当前驾驶需求而设置两个不同的离合器接合阶段门限值nII_entry。若电机功率可以满足当前驾驶需求,则设置较小的nII_entry值,使发动机主动调速阶段相对较长;若电机功率不能满足当前驾驶需求,则设置较大的nII_entry值,使发动机主动调速阶段较短而缩短整个换挡过程,但此时可能产生一定的换挡冲击和离合器磨损。表4中是有协调控制策略在两种情况下和无协调控制策略进入不同阶段所对应的门限值。仿真对比结果如图5所示。

门限值有协调控制无协调控制nII_entry电机功率充足50电机功率不足19001900nIII_entry0.2
如图5(a)所示,当采用协调控制方法时,车速曲线能较好地跟踪目标曲线,此时电机功率充足,选用的离合器接合门限值nII_entry=50r/min,发动机主动调速过程相对较长,如图5(c)所示。而未采用协调控制方法时,车速在换挡过程中出现了波动。如图5(b)所示,1挡升2挡的换挡过程被分为3个阶段,分别由纵轴的1,2,3数字所表征。未采用协调控制时,第一阶段(离合器分离)时间相对较短而很快进入第二阶段(离合器接合)。在离合器接合过程中,由于滑摩转矩的作用,发动机的转速快速趋近于第二挡的目标转速,如图5(c)所示,因而换挡时间相对较短。采用协调控制时,第一阶段发动机主动调速的时间相对较长,而当发动机转速降低至nII_entry=50r/min时,换挡进入第二阶段,此时发动机转速与目标转速已经相差不大,因而换挡第二阶段很快结束并进入第三阶段。两种控制方法的换挡时间如表5所示。无协调控制换挡时间与传统换挡时间类似,而有协调控制时间相对较长。
发动机转矩、电机转矩和离合器输出转矩的变化曲线如图5(d)~图5(f)所示。在换挡发生后,控制策略对发动机节气门开度进行调节而使发动机转矩下降,此时离合器处于分离状态而没有转矩输出。有协调控制的电机转矩迅速补偿由于离合器中断造成的转矩波动(如图5(e)中实线表示),而无协调控制的电机响应则很慢,在车速发生变化后才有一定的补偿转矩输出(如图5(e)中虚线表示)。对比图5(e)和图5(f)可见,有协调控制的电机转矩能较好地补偿离合器的转矩输出,从而减小动力系统的转矩波动;而无协调控制的电机转矩则补偿原定的发动机优化转矩,因此无法很好地补偿离合器的转矩波动,造成动力系统的冲击。
两种控制方法造成的离合器摩擦损失和车辆冲击如图5(g)和图5(h)所示。由于无协调控制方法的换挡过程很早就进入离合器接合滑摩阶段,因此离合器的摩擦损失较高;而有协调控制的离合器滑摩时间很短,此时的发动机转速差也很小,因此产生的离合器摩擦损失也很小。无协调控制的电机转矩没有实现对离合器转矩的补偿,因此车辆产生了较大的冲击;而有协调控制的电机转矩对离合器转矩的补偿较好,因而将冲击度控制在很小的一个范围内(±2.5 m/s3),符合德国的冲击度推荐标准(<10 m/s3)。离合器摩擦损失和车辆冲击度的具体数值如表6所示。采用协调控制后,离合器摩擦损失和车辆冲击度比无协调控制分别降低了99.98%和92.07%。
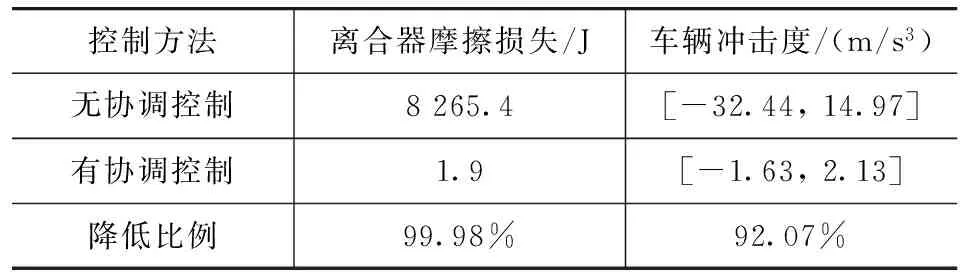
表6 仿真换挡冲击度和离合器摩擦损失对比
5 台架试验分析
5.1 台架试验系统
为进一步验证设计控制策略的有效性,搭建了如图6所示的混合动力系统台架。试验台架中,数据采集与控制系统负责数据的采集及工况加载等,实时仿真平台用于下载仿真模型及控制策略并对外发出控制信号。本台架共采用了5个测功机:0号测功机用于模拟发动机;1,2号测功机模拟前轮;3,4号测功机模拟后轮。后置电机与3,4号测功机相连组成后轮驱动结构。电机的转矩控制由控制系统通过CAN网络实现,而控制系统将执行机构控制信号送入变速器完成变速器的实时控制。
5.2 试验结果分析
在搭建的混合动力试验台架上对设计的协调控制策略进行验证,采用图4中加速曲线,用有协调控制和无协调控制方法分别进行了1挡升2挡的试验。
由于试验过程中的离合器滑摩功难以获得,故采用滑摩角表示离合器的摩擦损失。滑摩角是指离合器从动摩擦片和主从动摩擦片在滑摩过程中二者相对转过的角度。图7(a)中所示的有协调控制过程中,当离合器分离后,电机可迅速补偿车辆需求转矩,因而车辆的动力性得到保证,车辆的冲击度控制在[-4,+2]m/s3范围内。而图8(a)所示的无协调控制过程中,电机转矩没有迅速补偿车辆需求转矩,结果车辆出现冲击,冲击度约为[-20,+15]m/s3,超出了德国冲击度的推荐标准,会引起驾乘人员的不适感。冲击度和滑摩角的具体数值列在表7中,由于无协调控制很早就进入离合器滑摩过程,所以其产生的滑摩角也比有协调控制大很多。有协调控制时的滑摩角和冲击度比无协调控制时分别降低了74.67%和85.34%。

控制方法离合器滑摩角/rad车辆冲击度/(m/s3)无协调控制72.51[-20.14,14.99]有协调控制18.37[-3.32,1.83]降低比例74.67%85.34%
6 结论
本文中针对一款装备了AMT和后置电机的混合动力汽车设计了协调换挡控制策略。控制策略将换挡过程分为发动机主动调速、离合器接合和恢复并联驱动3个阶段。采用电机实时补偿动力系统转矩波动的方式,可以相对延长换挡时间。采用模糊PID控制器和模糊控制器对发动机转速和离合器接合速度进行调节,用于降低前驱动轴转矩波动。仿真和台架试验结果表明,与无协调控制策略的换挡策略相比,该换挡协调控制策略可以显著减小车辆冲击和离合器的磨损,能有效提高该型混合动力汽车的换挡品质。
[1] Ehsani M, Gao Y, Emadi A. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles[M]. CRC Press,2009.
[2] Koprubasi K, Westervelt E, Rizzoni G. Toward the Systematic Design of Controllers for Smooth Hybrid Electric Vehicle Mode Changes[C].American Control Conference, ACC′07, 2007: IEEE.
[3] Kim H, Kim J, Lee H. Mode Transition Control Using Disturbance Compensation for a Parallel Hybrid Electric Vehicle[J].Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2011, 225(2): 150-166.
[4] 王洪亮, 刘海鸥, 关超华, 等. 重型车辆 AMT 换挡过程控制方法研究[J].汽车工程, 2009,31(6): 540-544.
[5] 秦大同, 杜波, 段志辉, 等. 某型混合动力汽车AMT换挡控制策略的研究[J].汽车工程, 2013, 35(11): 1004-1010.
[6] Gu Yanchun, Yin Chengliang, Zhang Jianwu. Optimal Torque Control Strategy for Parallel Hybrid Electric Vehicle with Automatic Mechanical Transmission[J]. Chinese Journal of Mechanical Engineering(English Edition), 2007,20(1): 16-20.
[7] Zhu Futang, Chen Li, Yin Chengliang, et al. Dynamic Modelling and Systematic Control During the Mode Transition for a Multi-mode Hybrid Electric Vehicle[J].Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2013,227(7): 1007-1023.
[8] 吴志伟, 张建龙, 殷承良. 混合动力汽车用混合能量存储系统的设计[J].汽车工程, 2012,34(3): 190-196.
[9] Liang Junyi, Zhang Jianlong, Zhang Xi, et al. Energy Management Strategy for a Parallel Hybrid Electric Vehicle Equipped with a Battery/Ultra-capacitor Hybrid Energy Storage System[J].Journal of Zhejiang University Science A, 2013,14(8): 535-553.
[10] 欧阳明高, 李建秋, 杨福源, 等. 汽车新型动力系统:构型、建模与控制[M]. 北京: 清华大学出版社,2008.
A Study on the Coordinated Shift Control Strategy fora Hybrid Electric Vehicle
Liang Junyi, Zhang Jianlong & Yin Chengliang
ShanghaiJiaoTongUniversity,NationalEngineeringLaboratoryforAutomotiveElectronicControlTechnology,Shanghai200240
A coordinated gear shifting control strategy for a hybrid electric vehicle equipped with automated mechanical transmission and a rear drive motor is developed to optimize vehicle jerk and clutch friction loss. With the control strategy, the shifting process is divided into engine speed active regulation, clutch engagement and engine speed recovery three phases. Fuzzy PID and fuzzy controllers are adopted to regulate engine speed and clutch engaging speed respectively with the torque fluctuation of powertrain compensated by electric motor. Simulation and bench test results indicate that the adoption of coordinated control strategy, though relatively extending shift time, can concurrently reduce the vehicle jerk and clutch friction loss, with a shift jerk limited within ±4 m/s3and only a little clutch friction loss, apparently improving the shift quality of vehicle.
HEV; coordinated shift control strategy;vehicle jerk;clutch friction loss
*面向中美清洁能源合作的电动汽车前沿技术研究项目(2010DFA72760)资助。
原稿收到日期为2014年5月29日,修改稿收到日期为2014年8月21日。