个人导航用压力传感器的三维打印制备数字模型
2015-06-05程继红杨继全
李 娜,程继红,杨继全
(1. 南京师范大学 电气与自动化工程学院,南京 210042; 2. 江苏省三维打印装备与制造重点实验室,南京 210042)
个人导航用压力传感器的三维打印制备数字模型
李 娜1,2,程继红1,2,杨继全1,2
(1. 南京师范大学 电气与自动化工程学院,南京 210042; 2. 江苏省三维打印装备与制造重点实验室,南京 210042)
基于微喷三维打印机制造压力传感器,用于可穿戴的个人导航系统中。在基底表面不规则或者使用中经常被折弯的情况下,微喷打印工艺制备的MEMS器件精度更高,性能更好。研究了器件的可打印模型和工艺,给出压力传感器可打印的分层物理结构;研究了平面结构投影到三维基底上的投影空间,基于Terzopoulos弹性模型使用材料弹性度和结构弹性度模型给出投影空间;使用射线投影NURBS曲线来拟合边界轮廓,给出分层切片模型。为验证打印PZT膜的压电性能以及设计的压力传感器件的功能,使用不同的机械负荷测试其刚度,使用不同的直流偏置来测试耗损因数、品质因数等。通过比较实验对象的测量值和理论预测值之间的关系可以看出,打印的压力传感器薄膜具有很好的机械和电气性能。
三维打印机;微机电系统制造;定点制备;弹性模型;个人导航系统
个人导航设备是科技化可穿戴产品,最早源于20世纪60年代。现在可穿戴设备被定义为直接穿在身上,或是可整合到用户的衣服或配件[1-2]上的任何便携式设备。在2006年耐克公司推出内植芯片球鞋,配上iPod和iPhone监控软件,使得此技术开始大众化应用。可穿戴的要求之一就是产品的体积小,重量轻,制备的工艺和材料都有很高的要求。压电薄膜技术的出现使得可穿戴电子设备成为可能。可以用压电厚膜来制造多种微型器件[3,6],如微泵、超声马达、谐振器、热释电厚膜传感器、厚膜执行器、微能量拾取器等。目前,压电膜的应用主要集中在PZT膜的应用上。PZT压电膜可以用于MESM、压电加速度转换器等上面,其性能优异,是应用中广受青睐的材料之一。制备工艺常见的有化学气相沉积法、化学溶液沉积法、离子束溅射法、激光等离子体沉积和激光烧蚀等制备方法都可以得到较好的PTZ薄膜,这些方法基本上是在准二维平面上工作。结合3-3型压电材料的三维特性,使用三维微喷系统,可以制备精度更高,性能更好的压电功能器件,也适合在物体表面不规则,或者在弯曲状态下使用的情况。
本文研究使用复合压电PZT材料和微喷式三维打印机(3DP)工艺,定点制备个人导航用压力传感器,研究制备打印过程的数字制造,实现精确定点制备仪器。使用Terzopoulos提出的弹性模型,建立薄膜器件的平面二维结构到三维实体打印模型的映射关系,使得一个平面设计结构器件可映射打印到多个外形不同的基底上,建立平面结构薄膜三维制造的数学模型,并应用于个人用导航系统(PNS)中压力传感器的设计制造。
1 可打印传感器结构和模型
在个人导航系统中,行人位于的高度可以靠压力传感器的信息计算出来的,其工作原理是将输入信号(压力)转换为电阻变化,即通过惠斯登电桥架构的压阻式压力传感器感应施加在薄隔膜上的压力。在PNS的应用中[10],压力传感器的一个重要参数是灵敏度,高分辨率的小型压力传感器能够准确判断出目标位置是在桥上还是桥下,实现准确定位。
1.1 个人导航用压力传感器可打印结构
一般压电材料具有较低的最大应力范围(典型值0.1%),较高的工作频率[4]。通常情况下,应力正比于外加电场。电场和应力关系可由以下方程描述:

矩阵D和ES包含了材料的压电常数和常规参数。相对来说较高的x=a/r和d31具有较好的压电性能。机电耦合系数K是一个综合反映压电材料的机械能与电能之间耦合关系的物理量,是压电材料进行机-电能量转换能力的反映。机电耦合系数的定义是:
K2=电压效能转换所得的机械能/总机械能 (3)
压电振子的机械能与其形状和振动模式有关,不同的振动模式将有相应的机电耦合系数。平面耦合系数K12;横向耦合系数K31;纵向耦合系数K33等。由振动产生的电信号为:


图1 压力传感器电路图Fig.1 Circuit of pressure sensor
压力传感器中测量的重要部分是惠斯通电桥,输出测量电压和输入源电压的比值为:

由压力的变化导致电阻的变化,使得输出电压也会产生变化,设计的平衡条件是R1R3=R2R4,可选择R1=R2=R3=R4=R0, 此时,输出vo=0,
在有压力的作用下,电阻改变为:


这可作为压力传感器的灵敏度指标。设计单位面积内膜片上传感器结构如图2。理论上,压力作用下,膜片上产生相应的应力,应力最大点在边的中心点。相对于电阻长度的纵向l和横向t的压力,π是压电系数,δ是压力。相对阻抗值变换率为:

在垂直方向上:

在平行方向上:

因此平行于边方向的边中心的压力为:

制备过程中采用分层打印策略,如图2(b)。压力传感器使用PZT薄膜耦合在两个电极间的硅,电极间使用AC驱动信号,PZT层受压产生周期振动信号,依据此信号来计算压力。顶部和底部的电极设计为金属覆盖全部硅膜[8]。结合微喷打印工艺,一般PZT层打印可分层按需打印20层以上。
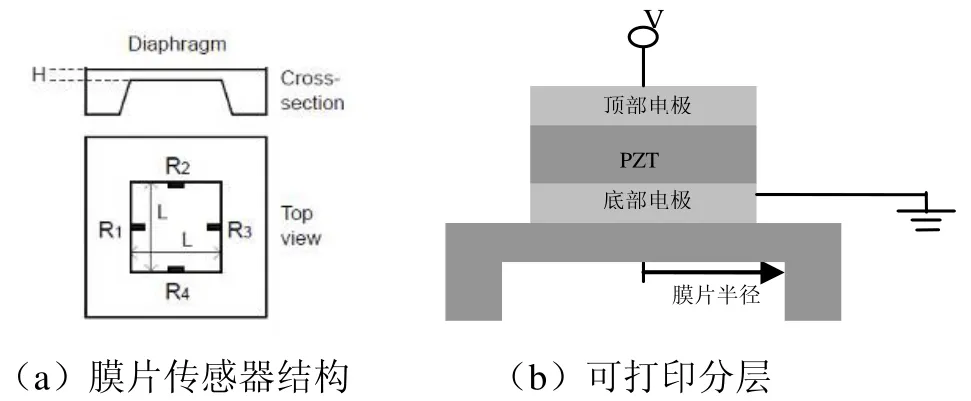
图2 器件可打印结构Fig.2 Printable structure of the device
1.2 打印模型
使用3DP打印制备MEMS器件时使用的是数字模型[5]。为了实现器件从二维设计平面映射到基底上的三维空间,需要建立平面二维模型到三维实体打印模型的映射关系。使用Terzopoulos[7]等提出的弹性模型,建立弹性映射空间,可满足不同基底形状的要求。目前使用STL模型来表示三维打印的模型轮廓最为常见,也就是用三角形切片来表示。三角形的三个点可看为质点,三角形按序连接,形成二维或三维结构。点与点之间的关系分为两种:材料弹性关系和结构弹性关系。材料弹性体现点与点在制备材料上的差异,结构弹性体现上下层点与点在结构上的差异,弹性度代表了投影的空间范围。
用Hook定律来描述材料的变形力。考虑P0点及与其相连的n个质点:p1,p2,...,pn∈IR3,则P0点的弹性变形力和弹性变形能为:
式中:ci是材料的变形系数,表示的质点间的距离,di表示p0与pi之间的初始距离,NPi-P0表示从p0指向pi的单位矢量。弹性系数依据可打印成型材料的特性参数给出。不同材料具有不同的弹性变形系数。
弹性质点作为测量压力的关键点,而质点的信息包含可映射的范围。在打印到不同形状的基底上时,质点映射位置是保证实现传感器功能的重要参数。
本文设计一种模型,此模型是以质点弹性信息来建立投影空间,使得这个空间内的基底形状都可以得到相应的映射。以弹性质点为关键点,弹性质点,其中,fi是pi点的弹性变形力,Ei是弹性变形能,mi是材料变形系数,mi∈M,cj是结构弹性系数,ci∈C。
假定薄膜受压力在由初始l0变形为l过程中,绝对变形量为Δl=l-l0,相对变形量为轴上的分量ui为某点受力作用发生的位移,

应变张量为:

正应变为(ε11,ε22,ε33),切应变为γxy=ε12+ε21=2ε12,体积变换为
则材料的变形系数M为:

由M可得到材料弹性变形范围,可由材料弹性度ψ来描述:

式中:li∈L,ijε∈ε。
使用3DP分层打印过程中,层与层之间弹性关系的描述使用结构弹性系数C。层与层之间如果使用的是相同材料,那么弹性相同,用1来表示;如果材料不同,那么相当于弹簧结构中各项异性的弹性关系,用其弹性系数A来描述。广义胡克定律为:

层与层之间的连接模型如图3(b)。上下两层之间的正变弹性模量为:

等效为各向异性的系数为:


图3 三角形网格的弹簧质点模型Fig.3 Elastic mass point in triangle mesh
则结构弹性变形系数为:


二维结构薄膜到三维成型的变形求解问题可描述为:寻找二维平面上弹性质点在投影到三维基底上时,每层打印的质点坐标在保证上下层之间结构弹性范围ψ和材料弹性范围η的基础上,使分辨率符合设计要求。分辨率与结构弹性度和材料弹性度有负向相关性。
确定映射空间,二维到三维变形模型的求解主要以下几点:
① 边界拟合。薄膜压力传感器的设计是平面的,在打印到不同的物体表面时是三维立体的;在拟合的过程中,从边界开始,先给出基底的周长,然后计算质点平均距离,保证在弹性力范围ψ内。
② 中心点拟合。在第三维度上(Z轴)上找到最大最小值,把薄膜器件的弹性能较大的中心点投影到最大/最小Z轴上,层数估算并保证结构弹性范围η内。
③ 按弹性力和弹性能,依次投影模型质点,拟合三角形平面,并计算分辨率。
④ 分辨率符合要求,则得到的三角形平面按序排列形成打印需要的STL文件;如果分辨率不符合要求,则重新选择中心点,然后返回第②步重新开始执行。
⑤ 使用分层算法获得每层打印的数字模型[9]。
2 制备过程模型
使用分层算法获得每层打印的模型。扫描基底形状,按层厚分层。第一层即基底,其中心作为第一层的原点。使用射线投影NURBS边线法[9]确定每一层的打印高度和边界,实现对质点的点云模型分层。射线法是以原点为中心,以初始角度ε为位移位置,依次照射分割整个图形边线点云,确定边界盒子,遍历后得到模型边界盒子。盒子的入口点和出口点作为NURBS的控制点,可得到边界轮廓曲线。
由第i个分层截面特征点云数据构建K次NURBS曲线为Ci,则Ci是由分段有理B样条多项式基函数定义的,即:

式中:Ci(u)为曲线的参数化表示形式,u∈U,U为节点矢量;Ni,k(u)为U定义的k次B样条基函数;dj为控制点,k为基函数的次数,ωj为响应控制点的权因子。阶次一般按合理性选择[10]。

图4 Ray-NURBS 法确定拟合轮廓线Fig.4 Contour fitting using Ray-NURBS
在射线所覆盖的每一片内的点遍历,求解变量u,遵守的准则是:由此方向确定的曲线与射线θ盒内最远点的距离小于系统公差ε。

计算分层打印模型的步骤为:
① 将弹性质点的点云数据根据指定分层厚度和分层方向,得到每层内的点;② 将一层内的点排序并连接,得到初始截面轮廓;③ 初始截面轮廓的均匀化处理[9];④ 进入下一层,寻找截面轮廓,直到最后一层。
3 性能研究
制备的压力传感器是面积约为15 mm2的MEMS器件,设计的器件结构如图5所示。重要的机械和电气特性参数包括压电耦合系数d31、介电常数ε33、耗散因数δ等。制备的实验样品模型如图5所示。需要进行测量的性能包括电阻值、弯曲度、压力响应等。

图5 薄膜器件设计图Fig.5 Thin film design of MEMS device
3.1 可弯曲度测量
在一定负载压力下,弯曲度的公式为:

所以,在r=0时,

当电路半径为400 μm时,理论预测的弯曲度为22.8 μnm,中心距为18.6 nm/kPa,而实验曲线斜率为18.2 nm/kPa,计算弯曲度为22.3 μnm,测量值和预测值误差近似为1%。刚度如图6所示。

图6 刚度测试Fig.6 Stiffness measurement
3.2 压力响应测量
不同尺度的器件具有不同的频率响应,一般研究所关心频率范围内的数据点的性能。膜片的频率响应与其动力回复力的类型有关,而回复力与其结构有关。薄膜结构的和金属结构的回复力分别来自于张力和刚度。N层夹薄膜的抗弯刚度的计算公式为[4]:

式中,Yn是弹性系数,vn是相对位置,hn是最上一层的高度,zs是中和平面的高度。使用抗弯度两个相对重要的回复力可计算为:

式中:T是薄膜张力;a是薄膜电路膜片半径,如果β>1,则表现为类似于薄膜式的;如果β<1,则表现于类似于金属片式的。传统仪器设计中,依据几何外形和压力精确地给出两种形式的振动频率,然而这里β的变化范围为0.53,意味着张力和刚度都需要考虑。Muralt[8]估计了振动频率:
由压力响应由幅值和变形函数乘积得到:

式中:w是薄片垂直方向的压力响应;A是变形幅度;J0是0阶Bessel函数;λ0和α是与振动模式有关的常数;x=a/r,是无量纲径向位置,r是径向位置,a是电路图半径。式(26)称为位移方程。
一定电压值下位于电路图中心位置的位移函数等效于的压力响应,把d31作为已知参数,取值为d31=-75pC/N。位移测试如图7所示。

图7 压力响应测量Fig.7 Measurement of tension response
3.3 器件的电气性能测试
PZT膜的介电属性、固有频率、品质因数等都与电阻参数有关。电容率与电路消耗与频率相关,变化范围很大。实验中,在1 kHz频率下测量介电常数。
损耗因数计算为:

式中:ω是测量频率,A是电极面积,ε0是初始空间内电容率ε0=8.85·10-12。三组样品N 次实验结果的测量值如表 1所示,电容率变化范围是750890 F/m,相对较小。损耗因数范围为2.4%2.8%,在合理范围内。对于给定参数,利用C1、R1、L1、C0可计算出器件的品质因数、共振频率。在表1所示的三个样品中,d1是膜片半径,d2是电极半径。

表1 性能测试表Tab.1 Performance tests
3.4 结 论
为了验证打印PZT膜的压电性能及设计的压力传感器件的功能,通过实验,使用不同的机械负荷测试其刚度,通过不同的直流偏置来测试耗损因数、品质因数等。打印PZT压力耦合系数d31在-74pC/N到-96pC/N之间,用1 kHz 下测得的电阻计算出的电容率在760880 F/m。介电消耗因数为2.5% 2.9%。进一步,用共振频率上测量的电阻来计算器件的性能,研究空气质量负荷和阻尼对性能的影响。最后通过测量值和理论预测值之间的关系可以看出,所制备的三维器件具有很好的性能,并且制备过程简单。可以看出,使用3DP打印制备MEMS具有广阔的应用前景。
[6] Virtanen J, Ukkonen L, Björninen T. Inkjet-Printed Humidity Sensor for Passive UHF RFID Systems[J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60: 2768-2777.
[7] Terzopoulos D, Waters K. Analysis and synthesis of facial image sequences using physical and anatomical models[J]. IEEE Trans. on Pattern Analysis and Machine Intelligence, 1993, 15(6): 569-579.
[8] Bathurst S P. Inkjet printing of PZT Thin Films for MEMS [D]. Massachusetts Institute of Technology, 2012: 83-95.
[9] Li Na, Yang Ji Quan, Cheng Ji Hong. Slicing method from data cloud for 3DP based on ray-NURBS[J]. International Journal of Advancements in Computing Technology, 2013, 5(14): 196-202.
[10] 张金亮, 秦永元, 梅春波. 基于MEMS惯性技术的鞋式个人导航系统[J]. 中国惯性技术学报, 2011, 19(3):253-256. Zhang Jin-Liang, Qin Yong-Yuan, Mei Chun-bo. Shoemounted personal navigation system based on MEMS inertial technology[J]. Journal of Chinese Inertial Technology, 2011, 19(3): 253-256.
Digital model of pressure sensor used in PNS for 3DP manufacture
LI Na1,2, CHENG Ji-hong1,2, YANG Ji-quan1,2
(1. School of Electrical and Automation Engineering, Nanjing Normal University, Nanjing 210042, China; 2. Laboratory of 3DP Equipment and Manufacturing of Jiangsu Province, Nanjing 210042, China)
The manufacture of MEMS pressure sensor in personal navigation system was studied based on a 3D micro-jet printer since MEMS devices with micro-jet printing have higher performance and precision on uneven and bending surface. The printable device model and technique were studied, and the printable layered physical structure was given. 2D-to-3D projection model and space are studied, and the material elastic degree and structure elastic degree models were given to get projection space based on Terzopoulos elastic model. NURBS curves were used to match the contour and get a layered slicing model. In the test, the stiffness was examined with different mechanical loads, and the dissipation factor and quality factor were obtained from different DC biases. The differences between theory prediction values and measurement values were in a reasonable range. The function of printable pressure sensor was achieved, and the electrical and mechanical performances were great. It is a useful model for device fabrication using electric paste based on 3D printing.
3D print; MEMS manufacture; fixed-point print; elastic model; personal navigate system
TP391
A
1005-6734(2015)02-0252-06
10.13695/j.cnki.12-1222/o3.2015.02.020
2014-11-29;
2015-03-24
国家自然科学基金资助项目(61273243、51407095);江苏省高校自然科学研究项目(13KJB460011);江苏省科技成果转化专项资金项目(BA2013058);江苏省科技基础设施重点项目(BM2013006)
李娜(1977—),女,博士,讲师,三维打印制备柔性器件。E-mail:linananjing@163.com
