基于外参考速度辅助的行进间罗经法对准
2015-06-05刘义亭徐晓苏田泽鑫
刘义亭,徐晓苏,张 涛,吴 亮,孙 进,田泽鑫
(1. 东南大学 仪器科学与工程学院,南京 210096;2. 东南大学 微惯性仪表与先进导航技术教育部重点实验室,南京 210096)
基于外参考速度辅助的行进间罗经法对准
刘义亭1,2,徐晓苏1,2,张 涛1,2,吴 亮1,2,孙 进1,2,田泽鑫1,2
(1. 东南大学 仪器科学与工程学院,南京 210096;2. 东南大学 微惯性仪表与先进导航技术教育部重点实验室,南京 210096)
为实现行进间罗经法对准,将外参考速度引入,同时设计不同机动方式下的罗经法控制回路参数调节规律提高对准精度、缩短对准时间。首先分析线运动对罗经法对准造成的影响,设计基于外速度辅助的行进间罗经法对准方案;然后利用对准回路传递函数进行误差分析,分析不同机动给对准精度造成的影响;最后提出不同机动方式下的罗经法对准回路控制参数设置规律。仿真结果表明基于外速度辅助的行进间罗经法对准能有效完成捷联惯导在匀速直线运动中的对准。根据设置规律调节对准回路中的控制参数,可以抑制80%以上由载体摇摆造成的低频干扰,将航向误差的振荡幅值降低为原来的1/2,有效提高了对准精度。
罗经法对准;误差分析;对准回路;控制参数
随着现代战争的发展需求,灵活、快速的机动能力是现代武器装备必须具备的基本要素。任意状态切换至战备状态,准确提供定位与姿态信息是武器装备上的捷联惯导系统必须具备的新性能[1]。初始对准是捷联惯导进行导航、定位的前提,然而对准时间和对准精度两个技术指标之间相互矛盾[2]。因而初始对准一直是捷联惯性导航领域中的关键技术之一。
国内早期针对捷联惯导初始对准技术的研究主要集中在静基座情形。目前,静基座对准精度已达到相当高的水平,且该技术已成功在国内众多车载定位定向设备中运用[1]。近几年,国内学者在行进间对准技术方面也取得了一些成就。
文献[3]建立了与惯性系相匹配的系统状态模型,利用Kalman滤波完成行进间对准,在一定程度上抑制了噪声干扰,提高对准精度。文献[4]利用里程计与惯性测量元件中的陀螺仪输出进行航位推算并建立航位推算误差模型,利用Kalman滤波对航位推算结果、捷联惯导结果进行融合实现运动基座对准。文献[5]利用DVL得到载体坐标系中的速度,利用航位推算得到地球坐标系中的位置,将该速度和位置与捷联惯导对应的导航信息相匹配进行行进间对准。文献[6]利用当地水平坐标系中的DVL速度进行匹配,有效提高系统的可观测性。文献[7]利用GPS输出的位置信息辅助SINS行进间对准。文献[8]讨论了基于传感器补偿的行进间罗经法对准。
目前针对行进间对准的研究主要借助于Kalman滤波,而罗经法为捷联惯导利用罗经原理实现的一种不依赖于外界信息的对准方法,其计算量小,对准的精度只与加速度计和陀螺的测量误差有关,在静基座情况下具有较强适用性,动态环境中罗经法无法使用。然而,当引入外界辅助参考速度后,罗经法对准在动基座中的运用具有较大的可行性。本文首先分析线运动对静基座罗经法造成的影响,进而引入外速度得到行进间罗经法对准方案。针对机动环境对罗经法对准的影响进行误差分析,结合误差分析结果提出不同机动方式下调节罗经法对准回路中的控制参数的规律。
1 基于外速度辅助的行进间罗经法对准
本节以指北方位系统为例对捷联惯导基于外速度辅助的行进间对准原理进行描述。指北方位系统的导航坐标系为当地地理坐标系,初始对准的目的是将捷联惯导的数学平台坐标系与地理坐标系的东、北、天指向重合。指北方位系统的初始对准包括水平对准和方位对准两步。
当基座有线运动时,载体存在位置变化、速度变化及加速度变化。这些变化对对准造成的影响具体表现为:
① 纬度变化对地球自转角速度ωie在导航坐标系中的投影造成影响。同时,对导航坐标系相对于地理坐标的转动角速度以及罗经回路中的ωiecosL产生影响。
② 线速度的存在首先会使纬度发生改变,再次通过载体对地速度的分量产生影响。其中为由外速度产生的角速度项,其在载体系上的投影会包含在陀螺的输出中。由速度引起的有害加速度项也会包含在加速度计的输出中。因此外速度对罗经回路的影响主要体现在由线运动产生的纬度误差、未补偿引起的等效陀螺漂移、未补偿带来的等效加速度计零偏。
③ 加速度对罗经法的影响也体现在使纬度发生改变,以及对载体对地速度分量和的影响,但影响形式与线速度不同。因此,需要引入外参考速度辅助SINS完成行进间罗经法对准。

图2 行进间水平对准回路北向通道Fig.2 North channel of in-motion horizontal alignment loop

图3 行进间对准方位通道Fig.3 Azimuth channel of in-motion alignment loop
图中标注①②③处为行进间对准与静基座对准区别的地方。具体为:
① 补偿一
② 补偿二
③ 补偿三
在fn的积分环节之后引入外速度,同时给速度赋初值。
2 机动对罗经法对准的影响
2.1 匀速直航中的DVL辅助罗经法对准
在匀速直航的罗经法对准中由于已完成了粗对准,计算坐标系与真实导航坐标系之间姿态误差在小角范围内,因此可直接利用该值进行投影获得计算坐标系中的速度,即:

通过对DVL参考速度在计算坐标系中投影的积分获得载体的位置:


若DVL存在测速误差δVcb,则DVL实际输出量测值表示为:

投影到计算坐标系有:

在匀速直航中忽略误差高阶小量,则式(7)可写成

在匀速直航中,由于载体存在摇摆以及在对准的过程中,失准角会存在小幅高频振荡,所以和δVn也主要表现出小幅高频振荡。而罗经法对准的水平通道和方位通道在一定程度上可以抑制高频噪声[6]。因此匀速直航中的小幅高频振荡对系统对准精度影响不大。
2.2 摇摆状态下DVL辅助罗经法对准
舰船在航行过程中受水浪影响会产生一定幅度的摇摆。陀螺的输出中除了包含陀螺常值漂移、随机漂移外,还包括由摇摆带来的干扰角速度。以水平对准的北向通道为例,此时图2中的εE变成εE+εE′,其中εE′为摇摆带来的干扰角速度,一般可表示为多个正弦波的叠加,如式(9)所示:

式中:γi(i =1,2,…)表示水浪分量的振荡幅值,fi(i=1,2,…)表示水浪分量的振荡频率,θi(i=1,2,…)表示水浪分量的初始相位。
为了便于分析,假设εE′为常值,若▽N、εE、φZ也为常值,则有

φx(s )达到稳态时为

同理,由图6可得:

适当选择K2、K3、K4,罗经法方位对准精度为:

式(11)(13)表明载体的摇摆对于水平对准的精度没有影响,但对方位对准的精度会产生一定的影响。此时若要提高方位对准精度,需要从陀螺的输出信号中滤除摇摆分量。
2.3 加、减速运动中的DVL辅助罗经法对准
在加减速运动中,根据图2及式(10)可知,当只考虑加速度量▽N对φx(s)的影响时,北向加速度计零偏、北向加速度与误差角φx(s)的频域方程为:

若令:

则有

东向加速度计零偏、东向加速与误差角φy(s)的频域方程和φxAN(s )具有同样的形式,此处不再赘述。
通过图3可以得到北向加速度计零偏、北向加速度与方位误差角φz(s)的频域方程:

若令:

则有


图4 北向加速度到xφ的幅频特性Fig.4 Amplitude-frequency characteristics of north acceleration and xφ

图5 北向加速度到zφ的幅频特性Fig.5 Amplitude-frequency characteristics of north acceleration andzφ
3 根据机动设置对准回路控制参数
结合第2节分析可知,捷联惯导初始对准系统对陀螺的低频干扰、加速度计的低频干扰、载体的加速度低频干扰较敏感。根据系统的运行状态在线调节各通道控制参数,在一定程度上能够降低运动状态对系统造成的影响[9-10]。本节针对不同运动状态下的参数设置进行讨论。
① 载体做匀速直线运动
此时捷联惯导系统的惯性测量元件输出中不包含由于机动引入的干扰信息。引入外速度辅助后对准系统能够正常工作,其控制参数的设置应该与静基座对准控制回路中的参数设置无较大差异。
② 载体做摇摆运动
当载体做摇摆运动时,捷联惯导的惯性测量元件输出中将包含由载体摇摆而引入的干扰,同时由于惯性测量元件本身的非线性问题在摇摆状态下也会放大,从而叠加到惯性测量元件的输出中。由第2节分析可知,当载体做低频摇摆时,低频干扰对方位对准精度有较大影响,因此需要调节方位回路中的。此时可以适当调大K4的值能够有效提高航向对准精度,但航向对准的时间会增加。
③ 载体做匀速+摇摆机动
综合前2种运动状态分析,为了得到匀速摇摆机动下最优对准效果,罗经对准控制回路参数调节规律为:首先根据载体运动环境,设置罗经法对准控制回路参数,同时对捷联惯导的陀螺输出设置阈值Dg。若陀螺的输出大于Dg,则先减小方位控制回路参数K4,加快方位对准收敛速度,待方位值迅速收敛到在某一范围内振荡后,增大方位对准回路中的K4,减小方位对准振荡幅值,提高对准精度。对准系统需要增加对准结束统计学判断标志。
虽然调节K1的值可以抑制加、减速运动给对准造成的影响,但频繁加、减速运动会造成反复调节控制回路参数K1,使得系统不稳定,同时使得对准时间极大增加。实际情况中频繁加、减速运动时并不采用罗经法对准。本文的仿真环节只给出匀速直线运动、摇摆、摇摆+匀速运动下的仿真结果。
4 仿真验证与分析
仿真实验中陀螺的常值漂移为0.04 (°)/h,随机漂移为。加速度计的零偏为50 μg,随机偏置为50 μg。假设系统已完成粗对准,精对准开始时的纵摇、横摇、航向姿态误差分别为0.5°、0.5°、1°。精对准分为两个阶段,0至300 s期间只进行水平精调平,方位回路不参与工作。此时控制参数分别为K1=0.06,K2=1280,K3=6.26×10-6。300 s时方位回路参与工作,此时方位回路控制参数分别为K1=0.06,K=1280,K=1.5×10-6,K=1.3。DVL
234的测速误差为当前速度的2%。以舰船为例,当舰船做匀速直线运动时,沿正北方向以2 m/s的速度做匀速直线运动,无摇摆;当舰船做摇摆运动时,舰船速度为0 m/s,同时纵摇、横摇和航向的摇摆幅值分别为8°、6°、4°,摇摆频率分别为0.15 Hz、0.2 Hz、0.125 Hz。当舰船做匀速+摇摆运动时,沿正北方向以2 m/s做匀速直线运动,同时纵摇、横摇和航向的摇摆幅值分别为8°、6°、4°,摇摆频率分别0.15 Hz、 0.2 Hz、0.125 Hz。
实验一 匀速直线运动
当舰船做匀速直线运动时,其对准的误差结果如图6所示。系统在200 s时基本完成水平精调平,从300 s开始系统进行方位对准,700 s方位对准基本完成。最终航向对准精度为0.180°,与理论极限对准精度相当,水平对准精度为0.002°。外参考速度的测速误差对系统对准精度没有影响。因此,当载体做匀速直线运动时,行进间罗经法对准能够在15 min内完成对准。
实验二 摇摆运动
当舰船做摇摆运动时,保持K1、K2、K3不变,调节K4,使其分别为5.2、2.6、1.3,则罗经法对准姿态误差曲线、航向姿态误差频谱图分别如图7、图8所示。
由图7可知,当载体做摇摆运动时,对准稳态系统在三个轴方向上也存在小幅的振荡。调节K4只对方位对准精度存在影响。K4=1.3时,航向对准约在900 s时达到稳定。K4=2.6时,航向对准约在1200 s时达到稳定。K4=5.2时,航向对准约在1800 s时达到稳定。因此增大K4时,方位对准的时间变长。但是当系统趋于稳定时,K4=5.2时航向误差振荡幅值是K4=1.3时航向误差振荡幅值的0.5倍。因此增大K4,方位误差的振荡幅值减小,说明增大K4有利于方位系统稳定。对方位误差进行频谱分析如图8所示,增大K4能有效降低干扰的幅值。

图6 匀速直线运动对准误差曲线Fig.6 Alignment errors with the uniform motion in straight line

图7 摇摆运动下对准误差曲线Fig.7 Alignment errors with swing movement

图8 摇摆运动航向姿态误差频谱Fig.8 Spectrum of heading attitude error with swing movement
实验三 摇摆+匀速直线运动
在匀速+摇摆情况下,为了实现缩短对准时间,提高对准精度的要求,按照上节参数设置规律调节对准回路控制参数。罗经法对准姿态误差曲线如图9所示。
由图9可以看出:300 s时系统开始进行方位对准,此时K4取得较小的值,航向误差开始迅速降低。当方位对准进行到900 s左右时,航向误差基本保持在一个稳定范围内振动。此时,系统自动切换控制回路参数,具体为:保持K1、K2、K3不变,增大K4的值,从而有效降低航向误差的振荡幅值,提高对准精度。
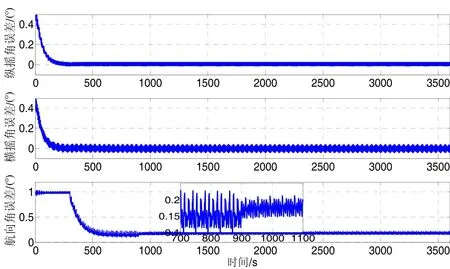
图9 摇摆+匀速直线运动下对准误差曲线Fig.9 Alignment errors with swing and uniform rectilinear motion
5 结 论
本文针对静基座罗经法在有线运动时存在的缺陷,将外参考速度引入,并对静基座罗经法在有线运动时存在的缺陷进行补偿,得到了基于外速度辅助的行进间罗经法对准方案。结合对行进间对准控制回路传递函数,分析了匀速直线运动、摇摆运动对水平对准回路和方位对准回路造成的影响,并对其进行了深入的误差分析。根据误差分析结果,提出了不同运动模式下的罗经法方位对准回路中的控制参数设置规律。仿真结果表明,基于外速度辅助的行进间罗经法在匀速直线运动中能有效完成捷联惯导的对准,根据参数设置规律调节方位对准回路中的控制参数可以有效抑制载体摇摆运动对对准造成的影响,提高对准精度。
(References):
[1] 练军想. 捷联惯导动基座对准新方法及误差抑制技术研究[D]. 长沙:国防科技大学, 2007: 2-5. Lian Jun-xiang. Research on a new moving-base alignment approach and error depression of strapdown inertial navigation system[D]. Changsha: National University of Defense Technology, 2007: 2-5.
[2] 肖烜, 王清哲, 付梦印, 等. 里程计辅助陆用惯导行进间对准方法[J].中国惯性技术学报, 2012, 20(2): 140-145. Xiao Xuan, Wang Qing-zhe, Fu Meng-yin, et al. INS in-motion alignment for land-vehicle aided by odometer [J]. Journal of Chinese Inertial Technology, 2012, 20(2): 140-145.
[3] 缪玲娟, 高伟熙, 沈军, 等. 基于惯性系采用Kalman滤波的车载SINS行进间对准方法[J]. 兵工学报, 2013, 34 (2): 143-148. Miao Ling-juan, Gao Wei-xi, Shen Jun, et al. SINS initial alignment algorithm based on inertial frame Kalman filter for marching vehicles[J]. ACTA ARMAMENTARII, 2013, 34(2): 143-148.
[4] 杨波, 彭培林, 王跃钢, 等. 里程计辅助捷联惯导运动基座对准方法[J]. 中国惯性技术学报, 2013, 21(3): 298-301. Yang Bo, Peng Pei-lin, Wang Yue-gang, et al. Alignment method of strapdown inertial navigation system aided by odometer on moving base[J]. Journal of Chinese Inertial Technology, 2013, 21(3): 298-301.
[5] Li K, Ling Y Y, Kai C S. A fast in-motion alignment algorithm for DVL aided SINS [J]. Mathematical Problem in Engineering, 2014, 2014(6): 1-12.
[6] Zhang Y. An approach of DVL-aided SDINS alignment for in-motion vessel[J]. Optik, 2013, 124(23): 6270-6275.
[7] Mei Chun-bo, Qin Yong-yuan, You Jinchuan, et al. SINS in-flight alignment algorithm based on GPS for guided artillery shell[J]. Journal of Chinese Inertial Technology, 2014, 22(1): 51-57.
[8] 徐博, 陈春, 郝燕玲, 等. 动基座捷联罗经法初始对准误差分析[J]. 系统工程与电子技术, 2013, 35(4): 812-819. Xu Bo, Chen Chun, Hao Yan-ling, et al. Error analysis of strapdown compass alignment in dynamic environment[J]. Systems Engineering and Electronics, 2013, 35(4): 812-819.
[9] Sun W, Sun F. Novel approach to GPS/SINS integration for IMU alignment [J]. Journal of System Engineering and Electronics, 2011, 22(3): 513-518.
[10] Li Q, Ben Y Y, Sun F, et al. A novel algorithm for marine strapdown gyrocompass based on digital filter[J]. Measurement, 2013, 46(1): 563-571.
Compassing alignment in motion based on external reference velocity
LIU Yi-ting1,2, XU Xiao-su1,2, ZHANG Tao1,2, WU Liang1,2, SUN Jin1,2, TIAN Ze-xin1,2
(1. School of Instrument Science and Engineering, Southeast University, Nanjing 210096, China; 2. Key Laboratory of Micro-Inertial Instrument and Advanced Navigation Technology, Southeast University, Nanjing 210096, China)
A compass method for SINS alignment on moving base is put forward by introducing external reference velocity and designing the setting laws for control-loop parameters in different motion modes. Firstly, the moving base’s influence on compass-based alignment is analyzed, and the compass-based alignment in motion based on external velocity is designed. Then, the influences of different motions on the alignment are discussed based on the transfer function of each alignment circuit. Finally, the setting lows for control-loop parameters are proposed. The simulation results show that the alignment of the strapdown inertial navigation system can be effectively completed by the compassing alignment based on external velocity in uniform motion. According to the setting laws, 80% of the low frequency interrupts derived by the rocking movements are restrained. The oscillation amplitude of the azimuth alignment error is reduced by half, which effectively improves the alignment precision.
compassing alignment; error analysis; alignment loop; controlling parameter
U666.1
A
1005-6734(2015)02-0165-07
10.13695/j.cnki.12-1222/o3.2015.02.006
2014-11-27;
2015-03-10
国家自然科学基金(61473085,51175082,51375088);微惯性仪表与先进导航技术教育部重点实验室基金;优秀青年教师教学科研资助计划(2242015R30031)
刘义亭(1985—),男,博士研究生,从事组合导航研究。E-mail:gcdlyt1985@163.com
联 系 人:徐晓苏(1961—),男,教授,博士生导师。E-mail:xxs@seu.edu.cn
