INS辅助周跳修复以实现精密单点定位瞬时重新收敛
2015-06-05孙付平张伦东李海峰
刘 帅,孙付平,张伦东,李海峰,陈 坡
(1. 信息工程大学 导航与空天目标工程学院,郑州 450001;2. 96251部队,洛阳 473200)
INS辅助周跳修复以实现精密单点定位瞬时重新收敛
刘 帅1,孙付平1,张伦东1,李海峰1,陈 坡2
(1. 信息工程大学 导航与空天目标工程学院,郑州 450001;2. 96251部队,洛阳 473200)
GNSS接收机信号极易受外界环境遮挡而完全中断,使得接收机所输出的相位观测值产生周跳,这将引起精密单点定位(PPP)模糊度参数的重新初始化,并需要十几分钟甚至更长时间的重新收敛,限制了PPP的推广应用。针对以上问题,以星间单差PPP/INS紧组合为研究基础,借助INS短期导航精度高的优势,提出一种INS辅助的周跳修复新方法。该新方法使用星间单差相位新息与星间单差电离层残差作为周跳修复量;为提高周跳修复可靠性,新方法对周跳修复量进行了质量控制并设置了多重修复准则。两组车载组合导航实验表明:与不修复相比,周跳修复后可实现PPP瞬时重新收敛,定位精度提升至20 cm以内;但需注意,周跳修复成功率会随着GNSS信号中断时间的延长而降低。
精密单点定位;周跳修复;重新收敛;星间单差;惯性导航系统;紧组合
精密单点定位(Precise Point Positioning,PPP)只需单台双频 GNSS(Global Navigation Satellite Systems)测量型接收机就可实现dm至cm级的定位精度,当 PPP与惯性导航系统(Inertial Navigation System,INS)组合时,可为车载移动测量、无人机摄影测量、航空重磁测量、海洋水深测量等用户提供测量平台的高频率高精度的位置和姿态信息,且无需架设基准站,不受作业距离限制,因而吸引了不少学者的研究和关注[1-6]。无论是单独的PPP还是PPP/INS组合,如何有效处理GNSS信号中断所引起的重新收敛是用户在实际作业中特别关心的问题。
在车载等应用环境中,受外界环境(如桥梁)遮挡,GNSS接收机信号会中断并导致输出的相位观测值中产生整数周的跳变。面临这种情况,单独的PPP需要将模糊度重新初始化并耗费十余分钟甚至几十分钟重新收敛,这严重限制它的推广使用。不少学者致力于解决PPP重新收敛问题,提出一系列新方法[7-11]。但在实际PPP解算中,对GNSS信号中断的处理,通常是对模糊度进行重置。这样做却会降低PPP的定位精度和可用性。
对于PPP/INS紧组合,在GNSS信号中断重捕后:即便对模糊度进行重新初始化,在INS短期导航精度高的约束下,依然可以加速PPP重新收敛;若能够挖掘相关信息来修复周跳,此时模糊度不再需要重新初始化,有望实现瞬时重新收敛并获取更好的定位效果。但是,如何在PPP/INS紧组合中修复周跳还未有较好的解决方案,需要重点对此问题展开研究。
一些学者研究了DGNSS/INS紧组合中的周跳修复问题[12-14],在该组合中,由于所用双差相位观测值消除或减弱了大部分误差,因而可直接利用双差相位新息修复周跳。但对于通常的非差PPP/INS紧组合,非差(Un-Difference,UD)相位新息受接收机钟差不稳定性影响而对周跳不很敏感。针对此问题,提出采用星间单差(Single Difference between satellite,SD)相位新息作为周跳修复量之一,该量可由星间单差PPP/INS紧组合中直接求出。与非差相位新息相比,星间单差相位新息不再受接收机钟的影响,将具备更好的周跳修复能力。为唯一确定各频率上的周跳,还将采用另一个周跳修复量,即星间单差电离层残差。
需要特别注意的是,错误的周跳修复将直接导致错误的定位结果。为了避免错误周跳修复,提高周跳修复可靠性,采取两方面措施:一是对周跳修复量进行质量控制,二是在修复过程中设置多重修复准则。最后将通过两组算例对周跳修复新方法的效果进行分析验证。
1 基本模型
在星间单差PPP/INS紧组合滤波中,需要构建系统模型以完成预测更新,同时要使用星间单差的伪距、相位和多普勒观测值进行量测更新,这一过程的具体实现可参考文献[6],不再详述。此处重点探讨如何利用INS导出的位置来求解星间单差相位新息。
以单台GPS接收机为例,其原始相位观测方程:

式中:上标s表示卫星;下标r表示接收机;下标j表示载波频率,表示原始相位观测值(m);表示波长(m);表 示以周为单位的相位观测值;ρs表示接收机到卫星的几何距离;c表示真空中的光速;dt表示接收机钟差;dts表示卫星钟差;Ts表示
r沿信号传播路径的对流层延迟;频率上的电离层延迟,且有其中 fj表示载波频率(Hz);与ε有关的项均表示观测噪声。假定式(1)中已经根据相关产品或模型进行了卫星轨道、天线相位中心、相位缠绕、潮汐、相对论效应、地球自转等误差改正[15],不再列出。在式(1)基础上,可推得非差相位消电离层观测方程:

对于式(2)中的卫星钟差dts,可用精密卫星钟差产品进行改正;对于对流层延迟Ts,它的干延迟可以使用模型改正,湿延迟需要进行估计。此后,对式(2)进行泰勒展开至一阶项,展开点取INS推算位置点:


若对式(2)进行星间作差,可消掉接收机钟差,得到星间单差相位消电离层观测方程:

对上式进行泰勒展开至一阶项,展开点仍取INS推算位置点:

式中:上标m和s分别指代基准星和非基准星;等号左边即为星间单差相位新息。与非差相位新息相比,星间单差相位新息不再受接收机钟差影响,将具备更好的周跳修复能力。记星间单差相位新息:

2 周跳修复量
在引入两类周跳修复量之前,需先对周跳进行定义。未发生周跳时,GPS的原始相位观测方程可用式(1)来表示。若tk时刻,卫星s的相位观测值中发生了量级的整周跳变,则可表示为:



2.1 星间单差相位新息
假设tk时刻发生了周跳,顾及式(9)和(10),由式(7)可得:

2.2 星间单差电离层残差
相位无几何观测值(Phase Geometry Free,PGF):

假设tk时刻未发生周跳,对前后历元的相位无几何观测值作差可得:




式中,h0和h1表示线性拟合系数,t表示观测时刻。对卫星i,取该星tk时刻之前的w个进行线性拟合。为了能应对各种复杂场景,特别是连续跟踪卫星数目少的情况,w不应设定成定值。文中设置先试图找到当前时刻之前wmax个观测值,一旦遇到周跳则自动停止,取已找到的w个观测值进行拟合,但w不能小于wmin。
假设tk时刻发生了周跳,根据式(15)有:

以上推导均为非差情形,若对式(17)进行星间单差,可得:
2.3 周跳修复量的质量控制
1)首先,进行如下收敛条件的判断来确保星间单差相位新息的质量:

2)其次,为确保星间单差电离层残差的质量,关键是要控制好相位无几何预测值的质量,具体做法为:计算线性拟合时的观测值单位权方差并进行检核,如式(20)所示,式中T1取1.5 cm。此外,还可设定预测时间限值,该限值需依据拟合效果确定:

3 周跳修复
3.1 修复策略

3.2 修复准则
在周跳修复过程中,还需要设定一系列修复准则来决定是否接受周跳修复值。当满足如下修复准则时,才对式(27)和(28)解算得到的周跳组合值进行取整,否则认为周跳修复失败:
式中,T2取0.25周,T3取0.30周。当满足式(29)时,可直接取整得到:
根据所求周跳整数值,还可求得扣除周跳的星间单差相位新息和星间单差电离层残差:
最后,还需要对扣除周跳的星间单差电离层残差进行如下检验:

式中,T4取0.012 m。式(36)等价于再次进行周跳探测,以防止错误周跳修复。至此,可成功求出周跳值。
4 算例分析与讨论
为了验证所提周跳修复新方法的效果,针对两组实测车载组合导航实验数据进行解算分析。第一组实验使用了GPS+GLONASS双系统接收机,观测环境良好,无信号中断发生,对这组数据加入模拟周跳和信号中断。第二组实验采集于高速公路,使用了GPS单系统接收机,GPS信号频繁失锁,该组数据能够更为真实的反映文中方法的实际效果。在数据预处理阶段,使用文献[19]的方法进行周跳探测。
基于新方法构造了周跳修复模块,加入到了星间单差PPP/INS紧组合滤波器中。当周跳修复失败时,使用伪距对模糊度参数进行重新初始化,同时对模糊度协方差重置;当周跳修复成功时,只需在模糊度参数中扣除周跳,模糊度协方差仍保持不变。
4.1 第一组跑车实验
4.1.1 数据背景
该组实验进行于2014年11月14日,地点为武汉某广场,跑车平面轨迹如图1所示。跑车时长约1h,观测环境良好,所观测到的卫星数如图2所示。车上架设有一台 NovAtel OEM4型号的双系统接收机(GPS+GLONASS)和一款战术级的LCI型号的INS,陀螺零偏小于 1 (°)/h。接收机采样率设为 1 Hz,INS采样率设为200 Hz。杠杠臂参数已被标定并在解算时进行改正。跑车时还架设了一台接收机作为基准站。使用商用后处理软件 IE(Inertial Explorer)分别以DGNSS模式和DGNSS/INS紧组合模式进行解算,解算结果的位置精度为cm级,可作为参考值。
由于卫星数目的增加,GPS/GLONASS组合PPP在收敛速度和精度方面要优于单系统 PPP[20-21],因此将同时使用GPS和GLONASS的观测值跟INS进行紧组合解算。由于GLONASS卫星采取频分多址的信号模式,它的波长和频率会因具体卫星而异,也导致了无法在星间单差层次上对其进行周跳修复。因此,GLONASS卫星发生周跳时,直接对模糊度重置。

图1 跑车平面轨迹Fig.1 Plane trajectory of carborne test 1

图2 可见卫星数目Fig.2 Satellite number in sight
4.1.2 周跳修复效果评估
人为的在9时50分和10时00分两个时刻的整秒点,对所有观测卫星加入随机大小周跳。由于两类周跳修复量的质量均会随中断延长而降低,因此重点探讨不同中断时长下的周跳修复效果。
考虑5 s、10 s、15 s和20 s四种中断时长。通过删除9时50分和10时00分这两个时刻前指定秒数的接收机观测数据,实现中断模拟。对模拟中断数据以星间单差PPP/INS紧组合模式进行解算并修复周跳。将真实的周跳值代入式(34)和(35),求得扣除周跳的星间单差相位新息和星间单差电离层残差,限于篇幅仅给出9时50分的结果,如图3、图4所示。表1对9时50分的修复结果进行了汇总。
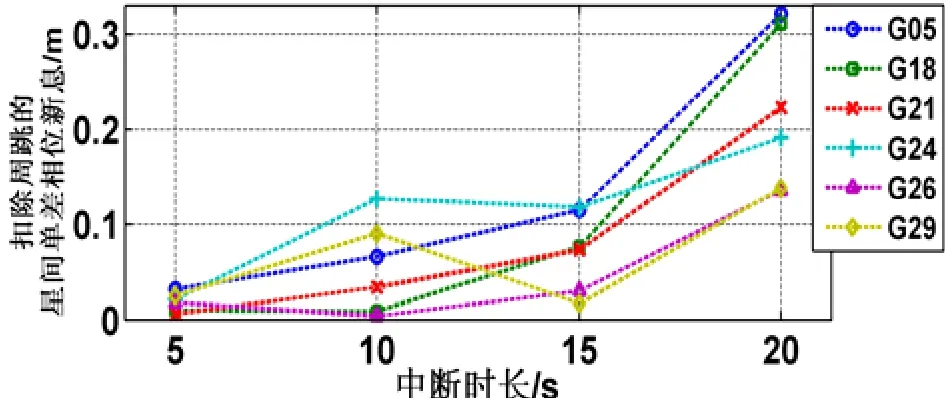
图3 9时50分扣除周跳的星间单差相位新息Fig.3 SD phase innovations without cycle-slips at 09:50
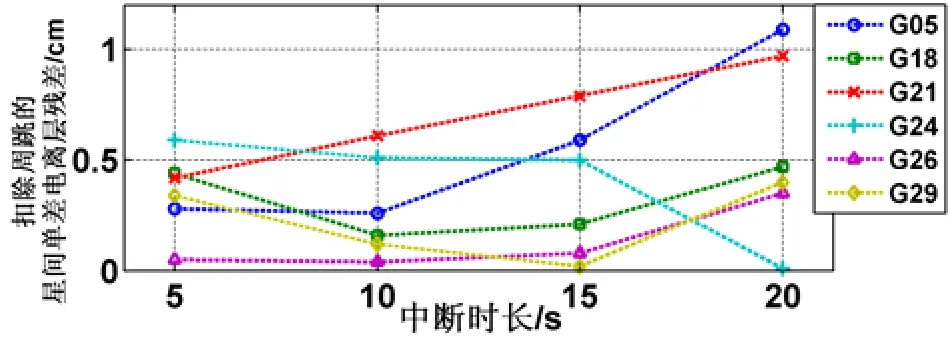
图4 9时50分扣除周跳的星间单差电离层残差Fig.4 SD phase ionosphere residuals without cycle-slips at 09:50

表1 9时50分,不同中断时长下,周跳修复结果Tab.1 Cycle-slip correction results at 09:50 under different GNSS signal blockages
观察表1,当GNSS信号中断5 s、10 s、15 s时,所有的周跳都能得到成功修复;当中断20 s时,有3颗星的周跳未能成功修复。观察图 4,扣除周跳的星间单差电离层残差通常在1 cm以内;但随着中断时间延长,由于INS导航误差的不断累积,扣除周跳的星间单差相位新息就会逐渐增大,如图3所示,它是阻碍周跳成功修复的主要因素。
尽管随着中断时间的延长,修复成功率逐渐下降,但是根据文献[13]的统计,对于城市区域,绝大多数中断是在10 s内。因此,除非遇到隧道等极端情况,文中方法均有望取得好的效果。
4.1.3 周跳修复对定位结果的改进
为了展现周跳修复对定位结果的改进,进行如下四种模式的解算:针对原始无中断数据进行①星间单差PPP/INS紧组合;针对GNSS信号中断15s数据进行②单独的星间单差PPP、③星间单差PPP/INS紧组合(不修复周跳)、④星间单差 PPP/INS紧组合(修复周跳)。这四种模式解算得到的位置误差分别如图5至图8所示。
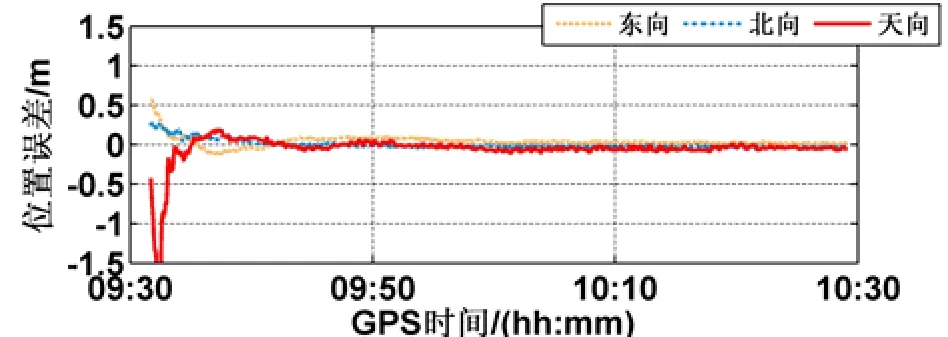
图5 星间单差PPP/INS紧组合位置误差(无中断)Fig.5 Position error of tightly coupled SD-PPP/INS without GNSS signal blockages
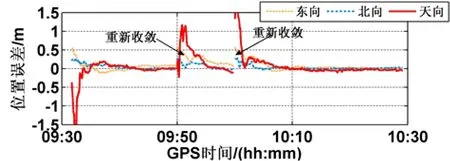
图6 单独PPP位置误差(中断15 s)Fig.6 Position error of PPP with 15 s GNSS signal blockages

图7 星间单差PPP/INS紧组合位置误差(中断15s,无周跳修复)Fig.7 Position error of tightly coupled SD-PPP/INS with 15 s GNSS signal blockages and without cycle-slip correction

图8 星间单差PPP/INS紧组合位置误差(中断15 s,周跳修复)Fig.8 Position error of tightly coupled SD-PPP/INS with 15 s GNSS signal blockage and with cycle-slip correction
对这4幅图进行比较分析:
① 观察图6,在GNSS信号中断处,单独PPP需要重新收敛,收敛起伏较大,定位精度显著降低;观察图7,尽管未进行周跳修复,但INS能提供的dm级的预测位置并形成约束,仍能较显著的加快重新收敛。
② 对比图7和图8,特别是9时50分至10时00分这一段(椭圆形框住部分),周跳修复后的位置误差更加的平缓且没有起伏,这是由于周跳修复后,避免了模糊度的重新初始化,实现了瞬时重新收敛。对比图5和图8,除图8中的两处尖刺点(GNSS信号中断时,INS单独导航所致),两者整体较为一致。
4.2 第二组跑车实验
4.2.1 数据背景
第二组算例数据取自实际的高速公路移动测绘任务。该实验进行于2012年10月7日,长约3 h。跑车地点为青兰高速(黄岛至诸城段),跑车平面轨迹如图9所示,跑车线路横跨东西方向约为55 km,若只架设单台基准站接收机,难以覆盖整条跑车路线。为保证整条跑车路线都能取得高精度的固定解,共架设了两台基准站接收机,这样流动站与基准站的距离总可控制在20 km以内。跑车中所用INS与第一组算例同型号,所用接收机为NovAtel L12VFA型号的GPS单系统接收机。其余设置与第一组算例相同。仍使用商用后处理软件 IE对所采数据(双基准站+流动站)分别以DGNSS模式和DGNSS/INS紧组合模式进行解算并作为参考值。
田塍上,《星火》的老师提着相机,不断地往后退,准备给笔会挑选一个绝佳的拍摄角度,突然,一条黑色的狗,好奇地钻进了画面。

图9 跑车平面轨迹Fig.9 Plane trajectory of carborne test 2

图10 可见卫星数目Fig.10 Satellite number in sight
受限于高速公路的环境特征,跑车过程中时常会有桥梁等遮挡GPS信号,导致GPS信号出现数秒至十余秒的中断。图 10给出了跑车过程中所观测到的GPS卫星数目。为了保证GPS信号中断前后有足够的公共卫星用于周跳修复,对原始的GPS数据进行如下预处理操作:当观测卫星数目不足4颗时,均认为信号中断并删除。
4.2.2 周跳修复效果评估
经统计发现,该数据共有73处GPS信号中断,最大中断时长为18 s,其余均在15 s以内。由于中断时长均较短,INS能够以较好的效果来辅助周跳修复。对该数据以星间单差PPP/INS紧组合模式进行解算并修复周跳。周跳修复成功率如图11所示。

图11 周跳修复成功率Fig.11 Success rate of cycle correction
4.2.3 周跳修复对定位结果的改进
针对该组数据采用如下三种模式进行解算:①单独的星间单差PPP;② 星间单差PPP/INS紧组合(不修复周跳);③ 星间单差PPP/INS紧组合(修复周跳)。这三种模式解算得到的位置误差分别如图12至图14所示。
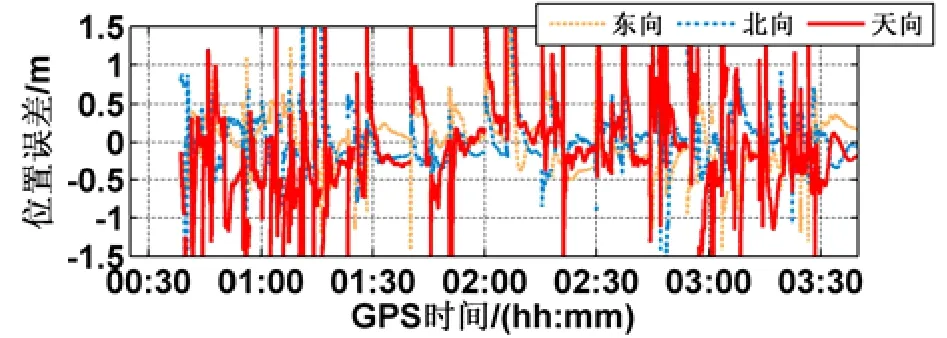
图12 单独PPP位置误差Fig.12 Position error of PPP

图13 星间单差PPP/INS紧组合位置误差(不修复周跳)Fig.13 Position error of tightly coupled SD-PPP/INS without cycle-slip correction
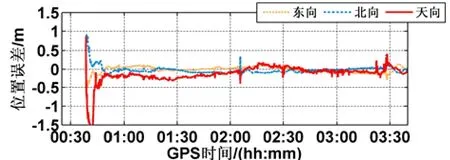
图14 星间单差PPP/INS紧组合位置误差(修复周跳)Fig.14 Position error of tightly coupled SD-PPP/INS with cycle-slip correction
对这三幅图进行比较分析:
② 对比图12和图13,即便未修复周跳,星间单差PPP/INS紧组合较单独PPP的定位效果有较大改进。这是因为实验中GPS信号中断时长均较短,INS仍能够导出较好精度的预测位置,从而形成约束并加速PPP的重新收敛,滤波收敛后的定位精度可以达到dm级。
③ 对比图13和图14可知,进行周跳修复后,星间单差PPP/INS紧组合定位结果得到了进一步改进。这是由于周跳修复成功后,可实现对模糊度参数信息的连续使用,避免了频繁的重新初始化,总体收敛更为充分。
表2对这两种模式的位置误差进行了统计,统计范围是01:00至数据末尾。由统计结果可知,周跳修复后,三维位置误差的RMS、STD分别为16.36 cm、6.31 cm,与不修复相比提高了近1倍。
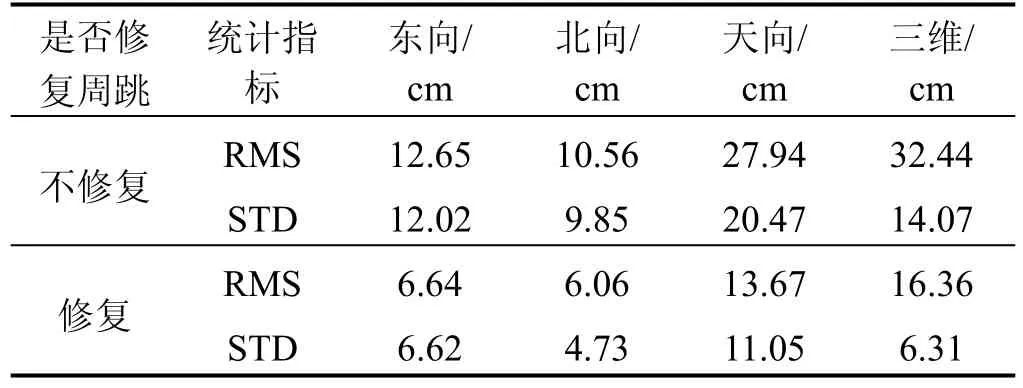
表2 星间单差PPP/INS紧组合位置误差统计Tab. 2 Position error statistics of tightly coupled SD-PPP/INS
5 结 论
针对 GNSS信号完全中断所引起的重新收敛问题,基于星间单差PPP/INS紧组合,提出了一种INS辅助的周跳修复新方法,通过两组车载组合导航实验对新方法进行了验证。主要结论如下:
① 一旦遭遇GNSS信号中断,PPP就会面临重新收敛,但凭借INS短期精度高的优势,可加速重新收敛;联合星间单差相位新息和星间单差电离层残差可修复周跳,周跳修复成功后,可避免模糊度重新初始化,实现瞬时重新收敛并获取更好定位效果。
② 随着GNSS信号中断时间延长,INS导航误差不断累积,INS所起约束作用在不断降低,周跳修复成功率也在降低;与此同时,错误修复风险在不断提高。因此在进行周跳修复时,可对GNSS信号中断时长进行限制,超出限值不再进行修复。
致谢:感谢中科院测地所柴艳菊副研究员对论文撰写的指导;特别感谢山东科技大学石波副教授提供了第二组实验数据及相关建议!
(References):
[1] Zhang Y, Gao Y. Integration of INS and un-differenced GPS measurements for precise position and attitude determination[J]. Journal of Navigation, 2008, 61(1): 87-97.
[2] Roesler G, Martell H. Tightly coupled processing of precise point position (PPP) and INS data[C]//Proceedings of ION GNSS 2009. Savannah, GA, 2009: 1898-1905.
[3] Shin E, Scherzinger B. Inertially aided Precise Point Positioning[C]//Proceedings of ION GNSS 2009. Savannah, GA, 2009: 1892-1897.
[4] Du S. Integration of precise point positioning and low cost MEMS IMU[D]. Calgary: University of Calgary, 2010.
[5] Rabbou M A, El-Rabbany A. Tightly coupled integration of GPS precise point positioning and MEMS-based inertial systems[J]. GPS Solutions, 2015, 19(4): 601-609.
[6] 刘帅, 孙付平, 李海峰, 等. 前后向平滑算法在精密单点定位/INS紧组合数据后处理中的应用[J]. 中国惯性技术学报, 2015, 23(1): 85-91. Liu Shuai, Sun Fu-ping, Li Hai-feng, et al. Forwardbackward-smoothing algorithm with application to tightly coupled PPP/INS data post-processing[J]. Journal of Chinese Inertial Technology, 2015, 23(1): 85-91.
[7] Banville S, Langley R B. Instantaneous cycle-slip correction for real-time PPP applications[J]. Navigation: Journal of The Institute of Navigation, 2010, 57(4): 325-334.
[8] Banville S, Langley R B. Mitigating the impact of ionospheric cycle slips in GNSS observations[J]. Journal of Geodesy, 2013, 87(2): 179-193.
[9] Geng J, Meng X, Dodson A H, et al. Rapid re-convergences to ambiguity-fixed solutions in precise point positioning[J]. Journal of Geodesy, 2010, 84(12): 705-714.
[10] Zhang X, Li X. Instantaneous re-initialization in real-time kinematic PPP with cycle slip fixing[J]. GPS Solutions, 2012, 16(3): 315-327.
[11] 陶庭叶, 何伟, 高飞, 等. 综合电离层残差和超宽巷探测和修复北斗周跳[J]. 中国惯性技术学报, 2015, 23(1): 54-58. Tao Ting-ye, He Wei, Gao Fei, et al. Detection and repair of compass cycle slips using ionosphere residual method and ultra-wide lane carrier[J]. 2015, 23(1): 54-58.
[12] Lee H, Wang J, Rizos C. Effective cycle slip detection and identification for high precision GPS/INS integrated systems[J]. Journal of Navigation, 2003, 56(3): 475-486.
[13] Takasu T, Yasuda A. Cycle slip detection and fixing by MEMS-IMU/GPS integration for mobile environment RTK-GPS[C]//Proceedings of ION GNSS 2008. Savannah, GA, 2008: 64-71.
[14] Karaim M O. Real-time cycle-slip detection and correction for land vehicle navigation using inertial aiding[D]. Kingston: Queen’s University, 2013.
[15] Kouba J, Héroux P. Precise point positioning using IGS orbit and clock products[J]. GPS Solutions, 2001, 5(2): 12-28.
[16] 杨元喜. 自适应动态导航定位[M]. 北京: 测绘出版社, 2006: 59-62.
[17] Dai L, Wang J, Rizos C, et al. Predicting atmospheric biases for real-time ambiguity resolution in GPS/ GLONASS reference station networks[J]. Journal of Geodesy, 2003, 76(11-12): 617-628.
[18] Kashani I, Wielgosz P, Grejner-Brzezinska D A. The impact of the ionospheric correction latency on long-baseline instantaneous kinematic GPS positioning[J]. Survey Review, 2007, 39(305): 238-251.
[19] 张小红, 郭斐, 李盼, 等. GNSS精密单点定位中的实时质量控制[J]. 武汉大学学报•信息科学版, 2012, 37(8): 940-944. Zhang Xiao-hong, Guo Fei, Li Pan, et al. Real-time quality control procedure for GNSS Precise Point Positioning[J]. Geomatics and Information Science of Wuhan University, 2012, 37(8): 940-944.
[20] Cai C, Gao Y. Modeling and assessment of combined GPS/GLONASS precise point positioning[J]. GPS Solutions, 2013, 17(2): 223-236.
[21] Li P, Zhang X. Integrating GPS and GLONASS to accelerate convergence and initialization times of precise point positioning[J]. GPS Solutions, 2014, 18(3): 461-471.
Instantaneous re-convergence of precise point positioning by using INS-aided cycle-slip correction
LIU Shuai1, SUN Fu-ping1, ZHANG Lun-dong1, LI Hai-feng1, CHEN Po2
(1. School of Navigation and Aerospace Engineering, Information Engineering University, Zhengzhou 450001, China; 2. Troops 96251, Luoyang 473200, China)
When GNSS signals are obstructed by outside environment, the ambiguity parameters in precise point positioning (PPP) filter have to be reset; and it will take 10 min or more to get re-convergence, which restricts the PPP’s applications. For the tight integration of single difference (SD) between satellites PPP and INS, even though the ambiguity parameters are reset, the rapid re-convergence of PPP can be achieved aided by the INS over short period. If cycle-slips could be corrected, then the ambiguity parameters will not be reset, which leads to the result that instantaneous re-convergence of PPP can be achieved. In this paper, a new cycle-slip correction method aided by INS is proposed, in which the SD phase innovation and the SD phase ionosphere residual are used as two cycle-slip correction observations. To improve the reliability of cycle-slip correction, the qualities of the two cycle-slip correction observations are checked, and several correction rules are set. Two carborne tests show that instantaneous re-convergence of PPP can be obtained, and the positioning accuracy is improved to less than 20 cm by using INS-aided cycle-slip correction. But it should be noted that the success rate of cycle-slip correction will decline with the increase of GNSS signal blockage time.
precise point positioning; cycle-slip correction; re-convergence; single difference between satellites; INS; tightly coupled
U666.1
A
2015-06-15;
:2015-09-28
国家自然科学基金(41374027)
刘帅(1986—),男,博士生,主要从事高精度GNSS、组合导航算法研究。E-mail:liushuai-0115@163.com
1005-6734(2015)05-0607-08
10.13695/j.cnki.12-1222/o3.2015.05.010
