救护车载PAM担架缓冲系统特性分析
2015-06-02孙大刚梁培根
孙大刚,高 蓬,2,宋 勇,梁培根,沈 毅
(1.太原科技大学 机械工程学院,太原 030024;2.长城汽车股份有限公司,河北 保定 071007)
路面不平度激励为引起车辆振动的重要因素。对运送伤病员的救护车而言,平顺性为重要指标。国外对救护车担架缓冲隔振系统研究较早,如日本的主动控制床可实时控制担架姿态,优化设计的悬架系统电流变液体阻尼器可有效减小病人的振动响应;德国Binz公司开发的担架液压空气减振系统获得推广应用。张顺心等[1-7]对救护车担架减振装置进行研究。本文通过建立气动人工肌肉(Pneumatic Artificial Muscle,PAM)担架隔振平台,隔绝车厢传递到担架的振动作用,该担架经折叠后可快速刚性锁定于平台。担架隔振平台气动人工肌肉安装及车载担架在救护车的布
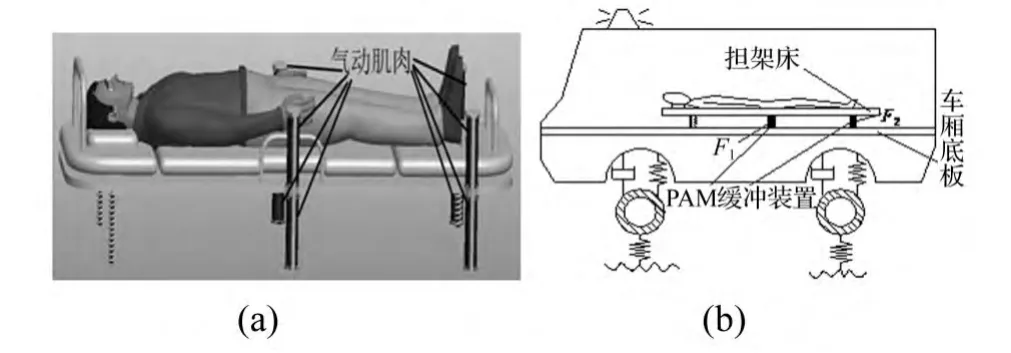
图1 PAM缓冲担架及安装位置Fig.1 Schematic diagram of PAM in buffer stretcher and stretcher in ambulance
气动人工肌肉也称气动橡胶驱动器,为新拉伸型气动执行元件,由一根橡皮管外包强力塑料网构成,充、放气时可像人的肌肉径向膨胀、轴向收缩,并产生轴向收缩拉力,可用其对振动进行控制。PAM缓冲机构具有结构简单、重量轻、易于小型化,柔性、不损害操作对象,动作平滑、无相对摩擦运动部件、无泄漏及操作中产生热、噪音小[9-12]等优点。由于构成PAM橡胶管与编织网间摩擦、橡胶管变形能及端部约束等影响,PAM工作特性参数如充气压力、工作负载及收缩比间为非线性,较难建立理想的描述PAM数学模型。考虑PAM控制的时变、非线性特点,本文将神经网络PID控制用于隔振系统,分析其隔振效果。
1 PAM力学特性
理想情况下忽略套筒橡胶弹性及橡胶套筒与纤维网间摩擦力,PAM收缩力为

若考虑橡胶套筒的弹性收缩力,橡胶收缩力为

式中:ε=(D-D0)/D0为PAM径向膨胀率;σ=(L0-L)/L0为PAM轴向收缩率。
橡胶套筒与纤维网间摩擦力为
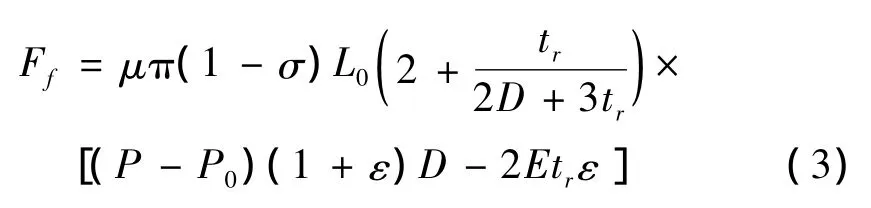
式中:P为PAM充气压力;P0为环境压力;D0为PAM初始直径;D为PAM工作直径;θ0为PAM初始的纤维与轴向夹角;θ为PAM工作的纤维与轴向夹角;L0为PAM初始长度;L为PAM工作长度;μ为纤维网与橡胶套筒间摩擦系数;E为PAM套筒橡胶弹性模量;tr为PAM橡胶套筒壁厚。

图2 PAM纤维层几何参数关系示意图Fig.2 Relation schematic diagram of PAM fibrous layer geometric parameters
PAM工作过程各几何参数变化示意见图2。
综合各式,得较完整的PAM静态数学模型为

2 车载担架振动模型建立
2.1 PAM 担架缓冲减振机理
由于PAM仅在充气时产生轴向拉力,放气时无轴向伸张力,故本文采用在担架平台上下对称布置形式。安装于担架台的加速度传感器实时测量担架垂向加速度及俯仰角加速度变化,并将数据传输给控制系统;用智能控制分析数据变化,控制执行机构给PAM或充气或放气以产生主动控制力。床中部PAM产生的主动力F1(图1(b),下同)控制担架垂向振动,床尾部PAM产生的主动力F2控制担架俯仰角振动,通过F1,F2联合作用可有效控制担架振动。
2.2 人体垂直振动模型
人体为复杂系统。与坐姿、立姿相比,卧姿的病人与担架接触面积最大,振动从病人表面与担架接触面处直接传入人体不同部位,用某一处响应不能完全代表全身振动、因此对病人身体各部位分段建模[14]。将人体振动模型简化为多自由度集中参数模型,拟作为线性系统处理。采用ISO 5892-1981及GB/T 16440-1996的三自由度卧姿人体阻抗模型,见图3。
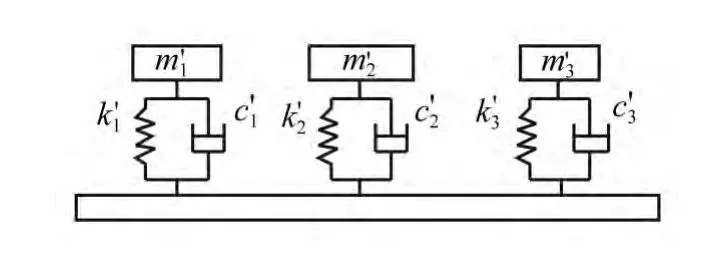
图3 卧姿人体阻抗模型Fig.3 Impedance model of a supine human body
模型参数采用GB/T 16440-1996推荐值,见表1,其中1代表头部,2代表臀部,3代表腿部。

表1 GB/T 16440-1996模型参数Tab.1 Model parameter of GB/T 16440 -1996
2.3 车辆-担架-人体模型建立
振动环境下尽管车厢及担架床会产生一定弹性变形,但担架的海绵垫及枕头的隔振作用仍较重要。因此将救护车厢及担架床视为刚体,用线性弹簧阻尼模拟床垫及枕头隔振效果。并设担架系统为对称于纵向平面的线性系统,建立车辆-担架-人体振动1/2模型,见图4。图中m1,m2,m3为头部、臀部及腿部质量,分别与图 2 中 m'1,m'2,m'3相等;m4为担架质量;m5为车身质量;m6,m7分别为前、后轮质量;j1,j2为担架、车身转动惯量;k1,k2,k3为头部、臀部及腿部与担架接触处刚度,分别包括图2中人体自身头部、臀部腿部刚度与床垫刚度之和;k4,k5为担架刚度;k6,k7为悬架刚度;k8,k9为轮胎刚度;c1,c2,c3为头部、臀部及腿部与担架接触处阻尼,分别包括图2中人体自身头部、臀部、腿部阻尼与床垫阻尼之和;c4,c5为担架阻尼;c6,c7为悬架阻尼;F1,F2为 PAM产生的主动控制力;q1,q2为路面激励。

图4 PAM担架振动模型Fig.4 Vibration model of PAM stretcher
据模型得车辆-担架-人体9自由度振动微分方程矩阵形式为

式中:M为质量矩阵;K为刚度矩阵;C为阻尼系数矩阵。
3 路面不平度模拟
采用英国汽车工业学会的标准路面谱ISOSCZ/WG4。该标准为研究路面不平度的重要参考[15-16]。
该标准中,路面功率谱密度函数S(Ω)为

式中:Ω为空间频率,对不同等级路面不平度,S(Ω0)取不同值。
本文路面不平度样本用三角级数叠加法生成,路面不平度样本计算公式为

式中:θk为服从0~2π均匀分布的随机项,可由此模拟不同等级路面不平度。
城市道路中的减速带在增强车辆行驶安全性同时会给救护车平稳快速运送病人增加障碍,降低紧急送医的及时性且使病人承受巨大颠簸。为此,本文构建单一型减速带激励动态模型[17-18],与路面不平度结合研究救护车载担架系统振动情况。
4 车载担架仿真及分析
4.1 BP网络PID控制
BP(Back Propagation)神经网络为按误差反向传播算法训练的多层前馈网络,可据系统的运行状态通过自学习及加权系数调整调节PID控制器参数控制系统振动。本文两控制器均采用4-6-3型BP网络结构,即输入层4个神经元,隐含层6个,输出层3个。
为提高病人的受振舒适性,设计两个BP神经网络PID控制器[19-22],据担架垂向加速度变化控制力 F1输出;据担架俯仰角加速度变化控制力F2输出。经两控制器联合作用,可有效控制担架的垂向、俯仰角振动。输入层神经元4个,输入元分别为

式中:x1为误差量;x2为误差变化;x3为x2变化;x4为控制器前一时刻输出。
网络输入层输入为

式中:M=4。
网络隐含层输入、输出、激活函数为

式中:w(2)ij为隐含层加权系数;上标(1)、(2)、(3)分别代表输入层、隐含层、输出层。
网络输出层输入、输出、激活函数为
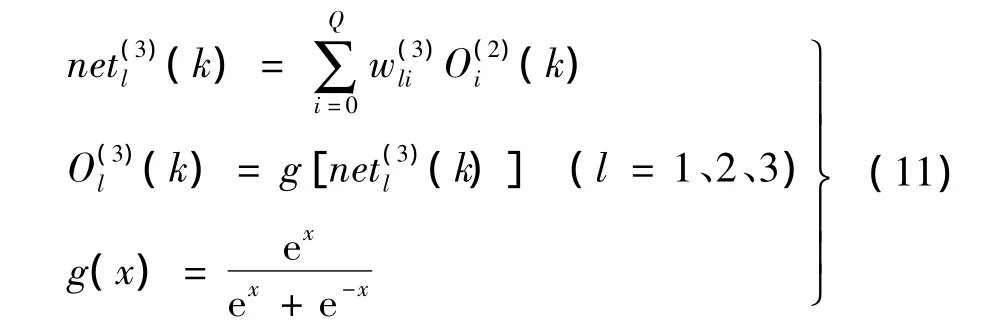
输出层输出节点为 PID 可调参数 kp,ki,kd,即

性能评价函数为
由于α-姜黄烯、α-姜烯和姜黄新酮等特征性共有峰对照品不易得,所以本实验选用β-石竹烯(S峰)为参照物,依据国家颁布的《中药注射剂指纹图谱研究的技术要求》,通过采用不同批次黄丝郁金药材样品,建立对照指纹图谱,根据对照指纹图谱的特征以及其参照峰(β-石竹烯),确定了22个共有峰。其中23号色谱峰虽然在每批样品中也都存在,而且含量约占黄丝郁金挥发油的50%,却并不是18批样品的共有峰,原因是23号色谱峰可能是由于芳基姜黄酮和姜黄酮未达到分离而共同形成的一个色谱峰,实验中曾考察了不同色谱柱和不同升温程序,但最终仍然未使之分离,如何优化实验条件使之完全分离有待进一步研究。

按梯度下降法修正网络权系数,得


4.2 控制系统框图
据神经网络算法,建立车载担架缓冲控制系统框图,见图5。此处可代表对担架垂向加速度的控制系统,俯仰角加速度的控制系统同理可得。

图5 BP网络PID控制系统Fig.5 BP neural network PID control system
4.3 仿真系统设计与分析
选Festo公司MAS-20-N300-AA-MCHK型气动肌肉作为车载担架缓冲系统所用PAM机构。主要参数为 l0=0.3 m,D0=0.02 m,θ0=20°,最大工作载荷为1500 N(满足担架减振所需的力),最大收缩率为额定长度的25%。仿真用某型车载担架各参数见表2。
表2 仿真参数Tab.2 Simulation parameters
用Matlab/simulink建立系统振动模型,并与Matlab神经网络工具箱的两个神经网络PID控制器结合,对救护车54 km/h在D级路面上行驶及18 km/h在B级路面行驶,并经减速带进行仿真。两种情况的病人头部、臀部、腿部加速度变化曲线对比见图6、图7,仿真结果见表3。

图6 D级路面下头、臀、腿加速度对比Fig.6 Acceleration comparison of head、buttock and leg on D level pavement condition
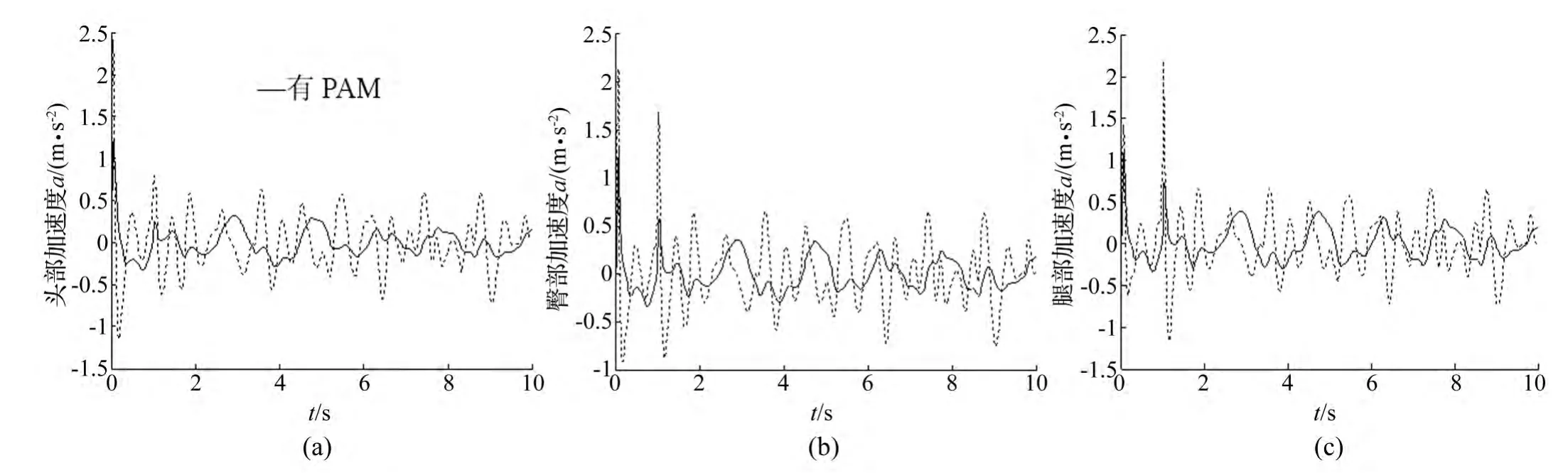
图7 B级路面过减速带头、臀、腿加速度对比Fig.7 Acceleration comparison of head、buttock and leg on B level pavement with speed control hump condition
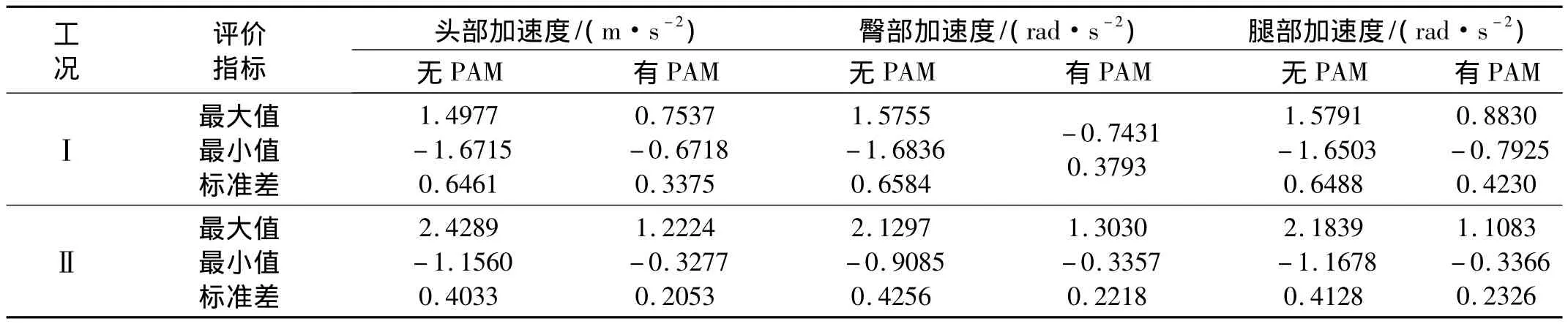
表3 仿真结果Tab.3 Simulation results
4.4 仿真结果分析
对比图5、图6及表3可知,所选两种工况的病人头部垂直振动加速度振幅最大值分别减小49.68%及49.67%,最小值分别减小59.81%及71.65%,标准差分别减小47.76%及49.09%;病人臀部垂直振动加速度最大值分别减小52.47%及38.82%,最小值分别减小55.86%及 63.05%,标准差分别减小 42.39%及47.89%;病人腿部垂直振动加速度最大值分别减小44.08%及49.25%,最小值分别减小51.98%及71.18%,标准差分别减小34.80%及43.65%。
在对车载担架垂向、俯仰角加速度控制基础上,以病人头部、臀部及腿部加速度大小为指标进行加装PAM前后对比。显然,担架的振动得到控制后人体各部位振动随之减小;尤其过减速带瞬时,加装PAM后加速度明显下降,从而能缓冲病人身体各部位所受瞬时冲击、提高病人舒适度。而对病人进行分段建模,便观察病人身体各部位振动,可针对性对某些部位进行防护。
因此,PAM担架隔振平台的运用,可有效降低病人身体各部位振动加速度,提高病人舒适度。
5 结论
(1)将PAM用于救护车载担架隔振平台,建立担架振动力学模型,并用BP神经网络PID控制及simulink仿真分析。结果表明,PAM担架缓冲系统可有效缓冲人体不同部位所受振动冲击、提高病人卧姿的舒适性。
(2)车载担架建模中,将人体分段建模可分析其不同部位的振动情况,对振动剧烈部位可进行特殊处理,具有一定实际意义。PAM以其良好的动态特性及动作平滑、柔性好、体积小巧等优点,可作为高品质车载担架缓冲系统执行器。
[1]徐新喜.急救车生物污染防护技术与担架支架减振性能优化研究[D].天津:天津大学机械工程学院,2008.
[2]Bruzzone L E,Molfino R M.Special-purpose parallel robot for active suspension of ambulance stretchers[J].International Journal of Robotics and Automation,2003,18(3):121-130.
[3]孙景工,任旭东,高振海,等.一种应用于救护车辆的磁流变减振器的实验研究[J].机床与液压,2007,35(3):54-55.SUN Jing-gong,REN Xu-dong,GAO Zhen-hai,et al.Experimental study of a magnetorheological fluid shock absorber in ambulance[J]. Hydromechatronics Engineering, 2007,35(3):54-55.
[4]Ono T,Inooka H.Actively-controlled beds for ambulances[J].International Journal of Automation and Computing,2009,6(1):1-6.
[5]祁建城,李若新,刘志国,等.救护车担架系统振动的阻尼主动控制研究[J].振动工程学报,1998,11(2):241-244.QI Jian-cheng,LI Ruo-xin,LIU Zhi-guo,et al.Study on active vibration control for ambulance stretcher system based on sky-hook damper theory[J].Journal of Vibration Engineering,1998,11(2):241-244.
[6]Murata Y,Maemori K I.Optimum design of ER dampers for ambulances[J].JSME International Journal Series C,1999,42(4):838-846.
[7]王猛.基于ADAMS的急救车担架支架减振特性仿真分析与优化研究[D].北京:中国人民解放军军事医学科学院,2009.
[8]王龙辉,金英子,朱红亮,等.七自由度气动人工肌肉机械手臂的设计及研究[J].浙江理工大学学报,2012,29(1):74-78.WANG Long-hui,JIN Ying-zi,ZHU Hong-liang,et al.Design and research of seven degrees of freedom robotic arm driven by pneumatic artificial muscle[J].Journal of Zhejiang Sci-Tech.University,2012,29(1):74 -78.
[9]陶国良,谢建蔚,周洪.气动人工肌肉的发展趋势与研究现状[J].机械工程学报,2009,45(10):75-83.TAO Guo-liang,XIE Jian-wei,ZHOU Hong.Research achievements and development trends of pneumatic artificial muscles[J].Journal of Mechanical Engineering,2009,45(10):75-83.
[10]Ahn K K,Anh H P H.Design and implementation of an adaptive recurrent neural networks(ARNN)controller of the pneumatic artificial muscle(PAM)manipulator[J].Mechatronics,2009,19(6):816 -828.
[11]Thanh T U,Ahn K K.Nonlinear PID control to improve the control performance of 2 axes pneumatic artificial muscle manipulator using neural network[J].Mechatronics,2006,16(9):577-587.
[12]隋立明,王祖温,包钢.气动肌肉与生物肌肉的力学特性对比研究[J].机床与液压,2004,6:22-24.SUI Li-ming,WANG Zu-wen,BAO Gang.A comparison of mechanical properties of pneumatic muscle with biological muscle[J].Hydromechatronics Engineering,2004,6:22-24.
[13]杨钢,李宝仁,傅晓云.气动人工肌肉系统动态特性研究[J].中国机械工程,2006,17(12):1294-1298.YANG Gang,LIBao-ren,FU Xiao-yun.Research on dynamic characteristics of a pneumatic muscle actuator[J].China Mechanical Engineering,2006,17(12):1294-1298.
[14]汤小红,杨岳,彭波.铁路卧铺客车人体振动舒适性建模与仿真[J].振动与冲击,2010,29(5):157-161.TANG Xiao-hong,YANG Yue,PENG Bo.Modeling and simulation of vibration comfort of human body in a railway sleeper carriage[J].Journal of Vibration and Shock,2010,29(5):157-161.
[15]夏均忠,马宗坡,白云川,等.路面不平度激励模型研究现状[J].噪声与振动控制,2012,32(5):1-5.XIA Jun-zhong,MA Zong-po,BAI Yun-chuan.State of research on model for road roughness excitation[J].Noise and Vibration Control,2012,32(5):1 -5.
[16]Sandra A K,Rao V R V,Sarkar A K.Road roughness modeling with clustered data using ANN approach[J].International Journal of Civil& Structural Engineering,2013,4(1):20-35.
[17]郑剑.减速带激励下非线性汽车悬架系统动力学特性研究[D].重庆:重庆大学,2010.
[18]Khorshid E,Alkalby F,Kamal H.Measurement of wholebody vibration exposure from speed control humps[J].Journal of Sound and Vibration,2007,304(3):640-659.
[19]王春华,唐焱.车辆主动悬架的BP神经网络自适应 PID控制[J].计算机仿真,2009,26(5):274-277.WANG Chun-hua,TANG Yan.Self-adaptive PID control based on Neural Network for active suspension vehicle[J].Computer Simulation,2009,26(5):274 -277.
[20]周德胜.神经网络PID在网络控制系统中的设计和仿真[D].大连:大连理工大学,2013.
[21]王修勇,宋璨,陈政清,等.磁流变阻尼器的性能试验与神经网络建模[J].振动与冲击,2009,28(4):42-46.WANG Xiu-yong,SONG Can,CHEN Zheng-qing,et al.Test of a MR damper and its modeling using neural network[J].Journal of Vibration and Shock,2009,28(4):42-46.
[22]Chen S,Zhang L.Optimization Tuning of PID parameters about PID controller based on BP neural network[J].Computer Simulation,2010,10:44:171-173.
