三维织机开口机构的设计
2015-06-01韩斌斌王益轩
韩斌斌,王益轩,路 超,赵 梅
(西安工程大学 机电工程学院,西安 710048)
三维织机开口机构的设计
韩斌斌,王益轩,路 超,赵 梅
(西安工程大学 机电工程学院,西安 710048)
为了满足三维织物织造要求,介绍了织机开口型式、选择依据以及电子开口机构的特点、工作原理,并对安装32页综框的电子开口机构进行虚拟样机模拟及仿真,以织造2D平纹织物为例进行分析。指出:三维织机理想的开口机构是采用多综眼综丝和多页综框相结合的方式;电子开口机构的综框运动规律较好,由单独伺服电机控制;合理设置电机运行函数,可织造2D平纹、斜纹、缎纹及复杂的3D织物。
三维织机;电子开口机构;连杆;伺服电机;多页综框;多眼综丝;仿真;运动规律;2D平纹;三维织物
0 引言
三维机织物作为纺织结构复合材料的预制件,织物中经、纬纱线不仅沿面内分布,而且沿厚度方向分布,形成空间网状结构[1]。织物的结构较为复杂,且织物形状也较多,采用传统的织机很难织造,但是可以在稍加改造的普通织机上生产,尤其是刚性剑杆织机,主要针对开口机构、引纬机构及打纬机构进行改进。
开口机构可采用多页综框或多眼综丝。引纬机构根据织机幅宽的不同而不同:如织机的幅宽为100 cm时,可采用多剑杆刚性引纬和导杆机构;幅宽为150 cm时,可采用导杆机构和电磁引纬;幅宽为190 cm时,最好采用电磁引纬。打纬机构主要采用既在后死心位置具有较长静止时间,又具有良好动态特性及安装制造性能的六连杆机构[2]。该机构有长筘座脚和短筘座脚之分,采用哪种型式主要依据引纬机构进行选取;如采用多剑杆刚性引纬时,选用长筘座脚;采用导杆机构和电磁引纬时,选用短筘座脚。
下文主要对开口机构进行研究,在电子开口机构上安装32页综框,每页综框安装单综眼综丝(综眼在综丝中间位置的单综眼、综眼位置不同的单综眼),根据三维织物经纱层数的不同,每页综框上综丝综眼的位置不同,但每页综框的动程相同,这样有利于有序形成多层梭口,既可以织造2D复杂织物,又可以织造复杂的3D织物。设计时,首先在pro/E软件中建立电子开口机构的虚拟样机模型,然后导入ADAMS软件中进行仿真,仿真以织造典型平纹织物为主,研究综框的运动规律。该运动规律对于三维织物的织造,具有较大参考价值。
1 开口机构概述
1.1 选择开口机构型式的依据
开口机构是织机的五大机构之一,是形成织物必需的重要机构,开口机构可以采用多页综框和多综眼综丝两种型式。
多综眼综丝的一根综丝上有多个综眼,可穿入多根经纱,且经纱的运动规律相同,这种结构形式的综丝特别适合于织造含有相同浮沉规律经纱层数较多的织物。对于同一种组织结构来说,多眼综丝的应用不仅大大减少织造织物所需综框的页数,也减少了开口机构占用的空间,使机构更加紧凑,而且将织物所需经纱分为多个层次,降低了经纱排列密度,减少了经纱之间以及经纱与综丝之间的磨损[1]。虽然多综眼综丝上穿过纱线的初始位置不同,但运动规律是相同的。当织造更为复杂的织物时,要求每页综框都有不同的运动规律,多综眼综丝就有一定的局限性了。此时,多综眼综丝只有分纱作用,虽有利于开清梭口,但不能满足复杂织物的织造要求;更重要的是多综眼综丝及安装综框的结构型式需要单独设计,不能采用常规的综框和综丝(我们已经对常规的综框和安装多综眼综丝的综框,进行了动静态分析),且材料和工艺方面也要经过严格考虑,极大地限制了其应用。
传统开口机构安装多页综框也存在一系列问题,如各页综框运动规律控制难、开口机构占据空间较大、综框动程调整不方便等。鉴于此,设计采用电子开口机构,安装32页综框(较多综框页数确保开口清晰程度);每页综框由单独的伺服电机驱动,使运动相互独立,极大地提高了织物结构的复杂性;综框间距为12 mm,整个开口机构只占用384 mm的空间,机构较为紧凑;更重要的是,综框动程可调,增大了织物品种的适应性。
理论上,最好的开口机构是采用多综眼综丝和多页综框相结合的方式。在电子开口机构上,根据不同三维织物组织的规律,安装不同数量的综框,且在综框上选择性地安装不同型式的综丝,比如单综眼、多综眼及单综眼和多综眼的混合综丝。鉴于篇幅所限,本文只对安装32页综框(单综眼综丝、每页综框上综眼位置可不同)的电子开口机构进行动态设计与研究。
1.2 电子开口机构的特点
电子开口机构由32个独立伺服电机控制开口运动,采用偏心盘四连杆开口方式[3],无论是在控制、机构还是工艺上都具有一定的特点。
就控制而言,通过多功能操作盘和主控制器CPU的结合,可对各页综框的开口型式、静止角度、闭口时间及动程进行单独控制,扩大了通用性[4]。对于机构而言,开口机构主要由曲柄摇杆机构、曲柄滑块机构(曲柄并非整周转动)及平行四边形机构组成。在曲柄摇杆机构中,调整曲柄的长度,可以改变摇杆的摆动幅度,从而调节综框的运动规律。实际上曲柄采用偏心盘固定在大齿轮上,调整起来并不方便;所以,通常将摇杆设置为可调的,就驱动综框的单侧机构而言,应该是由曲柄摇杆机构和曲柄滑块机构串联而成的六杆机构。改变摇杆尺寸后,综框的运动规律发生变化,通常会出现两种情况:综框动程增大,速度波动较大;综框动程减小,速度变化平缓,不能较好地满足三维织物的织造要求(综框动程较大,速度变化平缓),因此需将曲柄滑块机构也设置成可调的,这样可同时调节曲柄摇杆机构的摇杆和曲柄滑块机构的曲柄,以得到较好的综框运动规律。采用无偏距的对心曲柄滑块机构,可避免由于偏心导致综框提综和回综运动速度的差异对纱线产生的较大冲击。两个曲柄滑块机构通过一个平行四边形机构连接,极大地保证了两侧曲柄滑块机构运动的同步性;对于工艺而言,开口机构中的构件以连杆为主,充分地发挥了连杆良好的安装制造性能。
2 电子开口机构的工作原理
电子开口机构的工作原理如图1所示,伺服马达的驱动力矩通过连轴器传递给小齿轮1;借助小齿轮1和大齿轮2的啮合,驱使与大齿轮同轴固定的曲柄3(即偏心盘)作整周转动;曲柄3通过连杆4使三臂摆杆5摆动;三臂摆杆5通过综框连杆6使安装在其上的综框8作上下开口运动。其中:3,4,5为机架—曲柄摇杆机构;5,6,8,为机架—曲柄滑块机构;5,6,9为机架—平行四边形机构;8,9,10为机架—曲柄滑块机构。
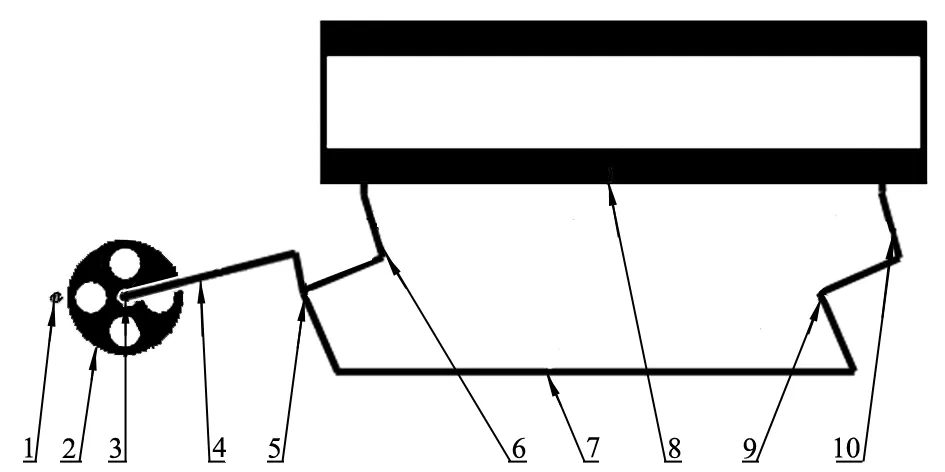
1—小齿轮;2—大齿轮;3—曲柄;4—连杆;5—三臂摆杆;6,10—综框连杆;7—连杆;8—综框;9—二臂摆杆。图1 电子开口机构的工作原理
3 电子开口机构的虚拟样机模型及仿真
首先在pro/E软件中建立了安装32页综框的电子开口机构的虚拟样机模型,如图2所示,然后导入到ADAMS软件中添加约束和参数设置后进行仿真,如图3所示。

图2 电子开口机构的虚拟样机模型

图3 ADAMS软件中添加约束和参数设置后的模型
4 仿真分析
4.1 单页综框的仿真分析
仿真时,电机转速为3 600°/s(600 r/min),由于大小齿轮的传动比为1∶10,则偏心盘的速度是360°/s(60 r/min),仿真时间设置为2 s,在此期间综框完成两个运动周期,如图4所示。

1—位移曲线;2—速度曲线;3—加速度曲线。图4 单页综框的运动规律曲线
由图4可知,综框运动服从简谐运动规律。在平综时,综框的速度最大,有利于上下层经纱迅速分离,开清梭口;梭口满开时,综框速度最小,有利于引纬;在开口终了和开始闭口时,加速度变化平稳缓和,有利于减小综框的振动。可见电子开口机构具有较好的运动规律,使经纱运动平稳,张力波动较小,综框振动较小,断头率也相应下降[5-7]。
4.2 织造平纹织物时综框的仿真分析
织造不同组织的织物时,为了得到综框不同的运动规律,需要给伺服电机添加不同的运行函数,织物组织越复杂,综框页数越多,运行函数的编写越困难。为了减轻编程的工作量,安装时尽量将各页综框安装在同一高度,可以是平综位置,也可以是两个极限位置,并以此位置作为参考,根据不同织物的组织要求,编写伺服电机的运行函数。
下文以织造平纹织物,综框安装在最低位置为例,来观察综框的运动规律。仿真时间设置为2 s,控制奇数页综框的伺服电机设置为3 600°/s,控制偶数页综框的伺服电机设置为step(time,0,0 d,1,3 600 d),其综框的运动规律曲线,如图5所示。

a) 位移曲线

b) 速度曲线
由图5可知,对于织造平纹织物来说,奇数页和偶数页综框的运动时序控制比较准确,同时到达平综及满开位置;平综时,速度最大;梭口满开时,速度最小,加速度变化平缓(除奇数页综框在起始位置和

c) 加速度曲线

d) 综合曲线1—奇数页综框;2—偶数页综框。图5 综框的运动规律曲线
第一次梭口达到满开时外)。由此可知,综框的运动规律完全符合织造平纹织物的要求,并且综框的运动规律较好。
5 结论
5.1 三维织机理想的开口机构是采用多综眼综丝和多页综框相结合的方式,即在电子开口机构上安装不同数量的综框,同时在综框上有选择性的安装不同型式的综丝。
5.2 电子开口机构的综框具有较好的运动规律,并且每页综框由单独的伺服电机控制,不仅能织造2D平纹、斜纹、缎纹等复杂织物,也能织造更为复杂的3D 织物。
5.3 织造不同组织的织物,要求综框有不同的运动规律,合理地设置电机的运行函数,可以满足织造的不同要求。
5.4 电子开口机构的每页综框由单独的伺服电机控制,即在电子开口机构上安装多少页综框,就能产生多少种不同的运动轨迹,从而可以织造出较为复杂的织物,再加上在综框上安装不同型式的综丝,织造织物的复杂程度更高。因此,多眼综丝和多页综框结合的方式,将在三维织物的织造过程中发挥巨大的优势。
[1] 柳宝琴.基于多剑杆织机的三维织物织造工艺研究[D].上海:东华大学,2014.
[2] 徐浩贻.现代喷气织机打纬机构及其分析对比[J].广西纺织科技, 2001,30(3):38-42.
[3] 邱海飞,王益轩,刘欣,等.高速电子开口装置动态仿真与设计[J].西安工程大学学报,2009,23(3):63-70.
[4] 严鹤群,戴继光.喷气织机原理与使用[M].北京:中国纺织出版社,2006.
[5] 陈人哲,陈明.纺织机械设计原理[M].北京:中国纺织出版社,1996.
[6] 孙恒,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2006.
[7] 陈峰华.ADAMS2012虚拟样机技术从入门到精通[M].北京:清华大学出版,2013.
•标准园地
纺织器材分技术委员会2013~2014年完成的纺织器材国家标准和行业标准制修订项目
2013~2014年,全国纺织机械与附件标准化技术委员会纺织器材分技术委员会(SAC/TC215/SC2)共完成纺织器材国家标准制订2项,行业标准制修订6项,明细见下表。
2013~2014年完成的纺织器材国家标准和行业标准制修订项目
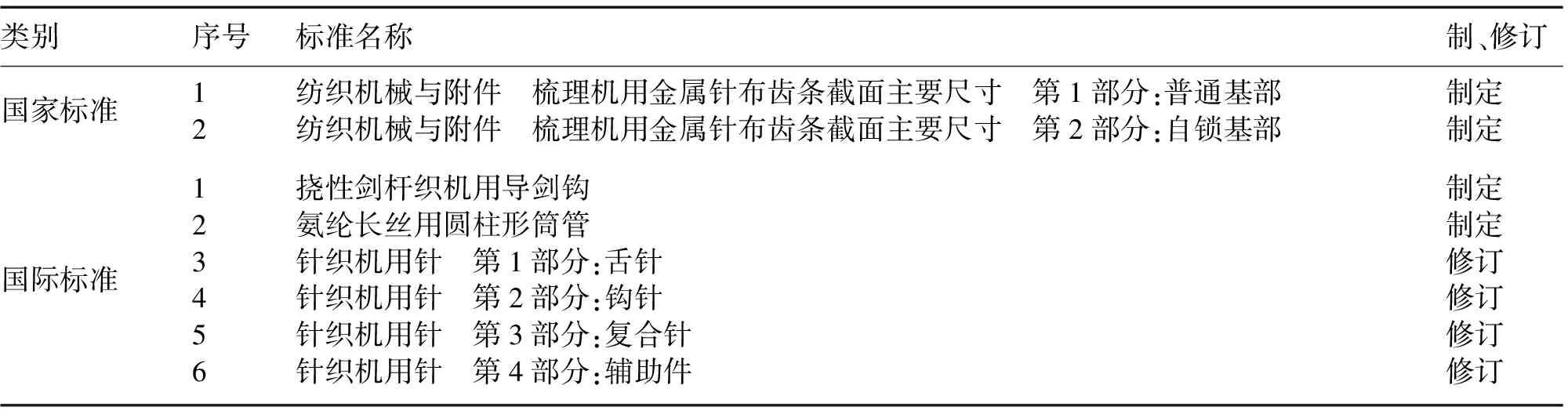
类别序号标准名称制、修订国家标准12纺织机械与附件 梳理机用金属针布齿条截面主要尺寸 第1部分:普通基部纺织机械与附件 梳理机用金属针布齿条截面主要尺寸 第2部分:自锁基部制定制定国际标准123456挠性剑杆织机用导剑钩氨纶长丝用圆柱形筒管针织机用针 第1部分:舌针针织机用针 第2部分:钩针针织机用针 第3部分:复合针针织机用针 第4部分:辅助件制定制定修订修订修订修订
陕西纺织器材研究所
The Design of the 3D Shedding Mechanism
HAN Binbin,WANG Yixuan,LU Chao,ZHAO Mei
(The Mechtronic Engineering College Xi’an Polytechnic University,Xi’an 710048,China)
In order to meet the requirement of 3D woven fabric,introduction is made to the loom shedding forms as to the selection basis and the characteristics of the electronic shedding mechanism,the working-how.The virtual prototyping simulation is done to the mounting electronic shedding mechanism with 32 herald frames,sampling the weaving 2D woven fabric as an example for analysis.It is pointed out that the ideal 3D loom shedding mechanism is equipped with combination of heddles with multi eyes and multi herald frame.The electronic shedding mechanism of herald frame is in regular motion,driven by separated servo motor.Proper setting of the motor running function can produce plain weave,twill,satin and 2D complex,even 3D fabric.
3D loom;electronic shedding mechanism;connecting rod;servo motor;multi herald frame;multi eye heddles;simulation;movement law;2D plain;3D fabric
2014-06-11
陕西省教育厅产业化培育项目资助(项目编号:2013JC17)
韩斌斌(1985—),男,河北泊头人,硕士,主要研究CAD/CAE/CAM及虚拟样机技术。
TS103.113
A
1001-9634(2015)01-0012-04
